Uhlhorn
-
Gesamte Inhalte
104 -
Benutzer seit
-
Letzter Besuch
Uhlhorn's Achievements
")





-
Oh, vielen Dank für die Info. Es gibt sie „with Boss“ und „without Boss“, was wohl ein kleiner Stift an der Unterseite ist, der wohl der Positionierung dient. Ich nehme an, ich benötige die Version „Without Ground Terminal, without Boss“, oder? Datenblatt: https://www.farnell.com/datasheets/2610940.pdf
-
Ich vermute, dass die Taster im UV-Licht spröde geworden und zerbröselt sind. Ja, doch wo bekommt man solche winzigen Taster gekauft? Alle, die ich gefunden habe, sind deutlich größer. Und ich würde jetzt auch Taster nehmen, die man von oben drückt und nicht von der Seite.
-
 Uhlhorn hat das Profilbild geändert
Uhlhorn hat das Profilbild geändert -
Moin, nach einigen Monaten arbeite ich jetzt wieder mal mit den Bricks und Bricklets. Ich möchte die Firmwares updaten. Leider musste ich feststellen, dass nun überall die Buttons fehlen. Was ist passiert?!? An kaum einem Modul habe ich noch „Reset“ und „Erase“-Buttons. Dabei wurden sie fast gar nicht benutzt. Sie standen sie die ganze Zeit nur auf dem Regal und wurden vielleicht 5-mal eingeschaltet. Heute wollte ich die Firmware aktualisieren und nirgends sind mehr Buttons dran. :-/ Weiß jemand etwas darüber, was damit geschehen sein könnte? Wurden sie etwa durch Tageslicht zersetzt? Sie waren nicht der Sonne ausgesetzt. Ich finde das sehr mysteriös! Wie kann man das reparieren?
-
Das weiß ich leider auch nicht. Ich habe mich schon lange nicht mehr damit beschäftigt, habe zu viel Anderes zu tun im Moment.Das weiß ich leider auch nicht. Ich habe mich schon lange nicht mehr damit beschäftigt, habe zu viel Anderes zu tun im Moment.
-
Ach so. Ich konnte übrigens nirgends irgendwelche Informationen finden, was der Unterschied zwischen den normalen und den Industrial Bricklets ist. Das solltet Ihr unbedingt ergänzen. ;-) Und ich bin doof: ich kann doch den 5 V out mit dem Vin verbinden. Und das Drehspulinstrument schalte ich dann in Reihe mit 250 Ω. Das müsste doch funktionieren.
-
Zu jeder Spannung gehört ein Strom, zu jedem Strom gehört eine Spannung. ;-) Das ist nicht nötig, ich werde das sicherlich auch irgendwann mal wo anders verwenden können. Aber gut, dass ich nicht gleich mehrere gekauft habe. Falls Ihr mal eine Neuauflage davon macht, dann erzeugt doch die Hilfsspannung mit einem Step-Up-Converter direkt aus der internen Versorgungsspannung . Es werden ja keine Leistungen benötigt, es sollte also ohne Weiteres machbar sein. ;-) Okay, dann muss ich jetzt mal schauen, wie ich das löse. Ich bin nämlich ab nächste Woche für 10 Wochen weg. Dann schaffe ich das vorher leider nicht mehr. Es ist aber auch nicht kriegsentscheidend. ;-)
-
So wie Malik geschrieben hat das Analog-Out-Bricklet. Und nach meinem Verständnis bezieht sich die Stromangabe nur auf das Drehspulinstrument. Denn es ist ein Weigel PQ72K 4-20mA Schalttafel-Einbauinstrument.
-
Ich habe das Analog-Bricklet jetzt vor mir. Entweder ist mein Messgerät kaputt oder man benötigt doch eine Hilfsspannung.
-
Prima, danke vielmals! :-) Dann werde ich mal ein paar Analog-out-Bricks bestellen.
-
Ah, danke sehr. :-) Das Bricklet könnte man erweitern, so dass es selbst die 10 Volt aus den 5 V mit Hilfe eines Stepp-Converters erzeugt. Das möchte ich mal als Feature Request für die nächste Version nennen. ;-) Die Frage, die sich mir stellt, ist, welches Drehspulmessgerät muss ich denn einkaufen, damit ich mit den internen 5 Volt einen Vollausschlag hinbekomme? Denn Drehspulmessgeräte mit 5 Volt kann ich nirgends finden. Es gibt aber welche mit z.B. 20 mA, die also einen Strom und keine Spannung zeigen. Eventuell muss ich noch einen Widerstand in Reihe schalten, um den gewünschten 0…100 % Ausschlag zu bekommen. Aber Ihr habt bestimmt Erfahrung und könnt sofort sagen, welches analoge Einbaumessgerät ideal wäre. Für einen Hinweis wäre ich dankbar. :-)
-
Hmm, ich glaube, für meine Anzeige verwende ich doch lieber ein Analog Out Bricklet. :-) Da das Bricklet die 12 V Hilfsspannung nicht leider selbst erzeugt, habe ich dazu eine Frage: Ohne Hilfsspannung kann es wohl 0…5 Volt ausgeben, richtig? Leider finde ich keine Drehspuhl-Einbauinstrumente für 5 Volt. Es gibt aber eines von Weigel, das PQ72K, das hat einen Bereich von 0 bis 20mA. Kann ich das auch verwenden? Das Analog-Bricklet bietet ja bis 24 mA.
-
Hmm, das verstehe ich nicht ganz. Du redest von diesen beiden Zuständen, oder? Die treten ja ganz am Anfang und ganz am Ende auf. Das ist dann vermutlich der Grund, warum es erst ab 5000 losgeht. Aber es ist doch wohl nicht der Grund, warum ich zwischen den Werten 28481 und 28482 einen Sprung habe, oder? Das würde meinen Punkt 2 erklären, meine ich.

-
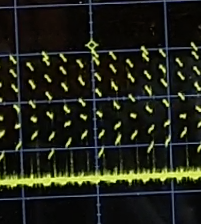
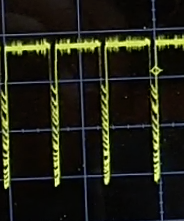
Um die Werte 28481 und 28482 sehe ich diesen Sprung, so dass ein Motor ruckelt und eine Glühlampe flackert. Das ist bei Standardwerten, also 15 kHz. Die Acceleration ist, glaube ich, unerheblich. Natürlich muss sie so niedrig sein, dass man es sehen kann. ;-) Ich habe experimentiert mit Werten von 100, 300, 500, und Ähnliche. Das Flackern war mir schon früher aufgefallen, hatte dem aber keine Beachtung geschenkt (dabei ist Genauigkeit ein wissenschaftliches Prinzip!). Erst als ich ein Einbauvoltmeter als Anzeige für einen Messwert verwenden wollte, bemerkte ich, dass der Zeiger bei der Standardeinstellung immer wieder ruckelt. Man schafft es nicht ihn gleichmäßig zu bewegen. Das brachte mich dazu, mir die Sache doch mal genauer anzusehen. Und ich brauche unbedingt ein gescheites Oszilloskop! ;-)
-
Ja, okay, das verstehe ich ja. Trotzdem „springt“ der Motor immer um den Wert 28484 herum. Oder wenn ich eine Glühlampe verwende, flackert sie um diesen Wert herum immer. Die Messungen mit dem Voltmeter habe ich unter der Last einer kleinen 24 V Glühlampe gemacht.