gnu
Members
-
Benutzer seit
-
Letzter Besuch
-
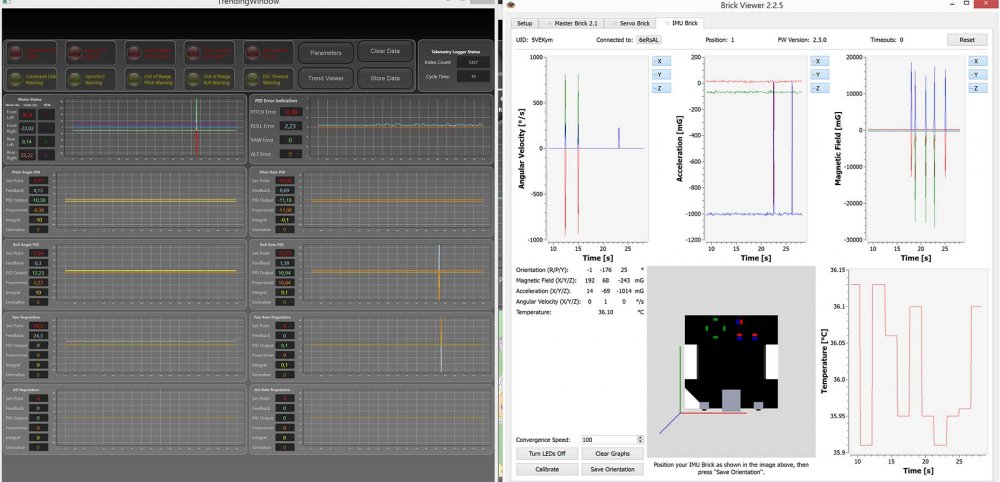
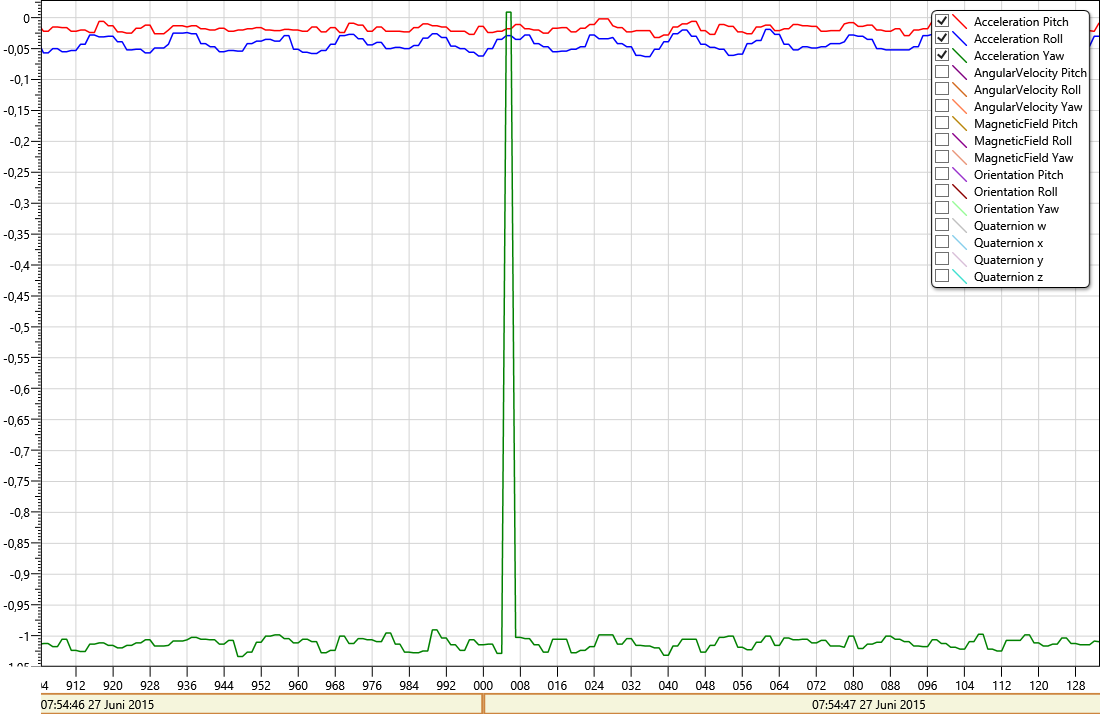
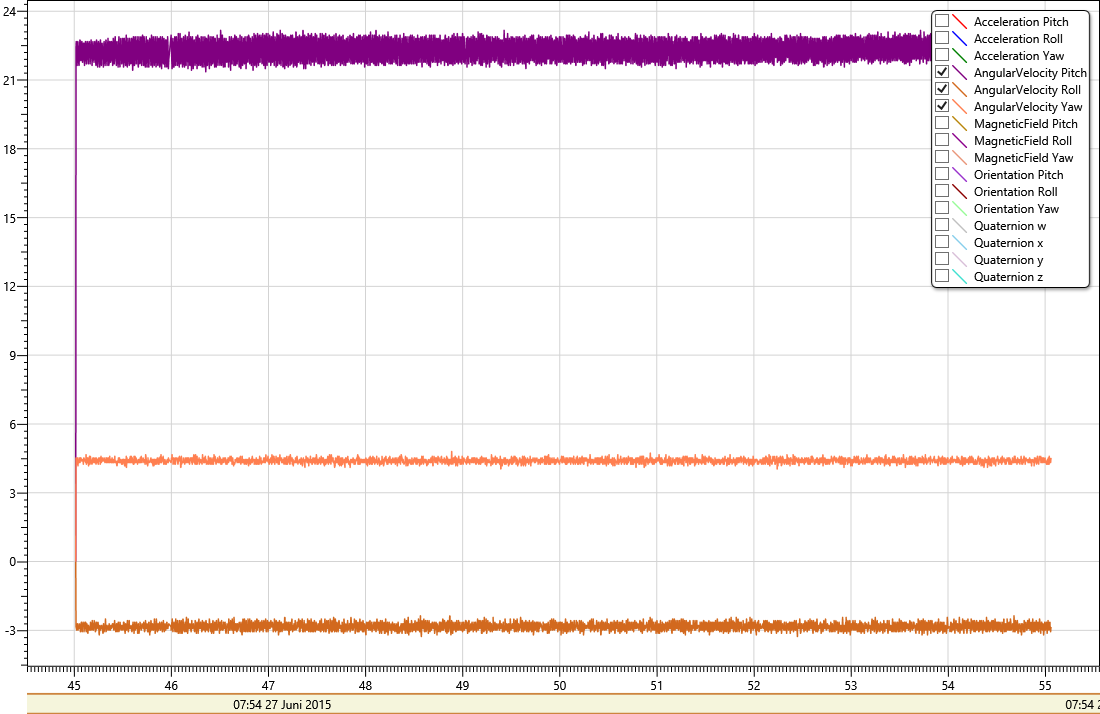
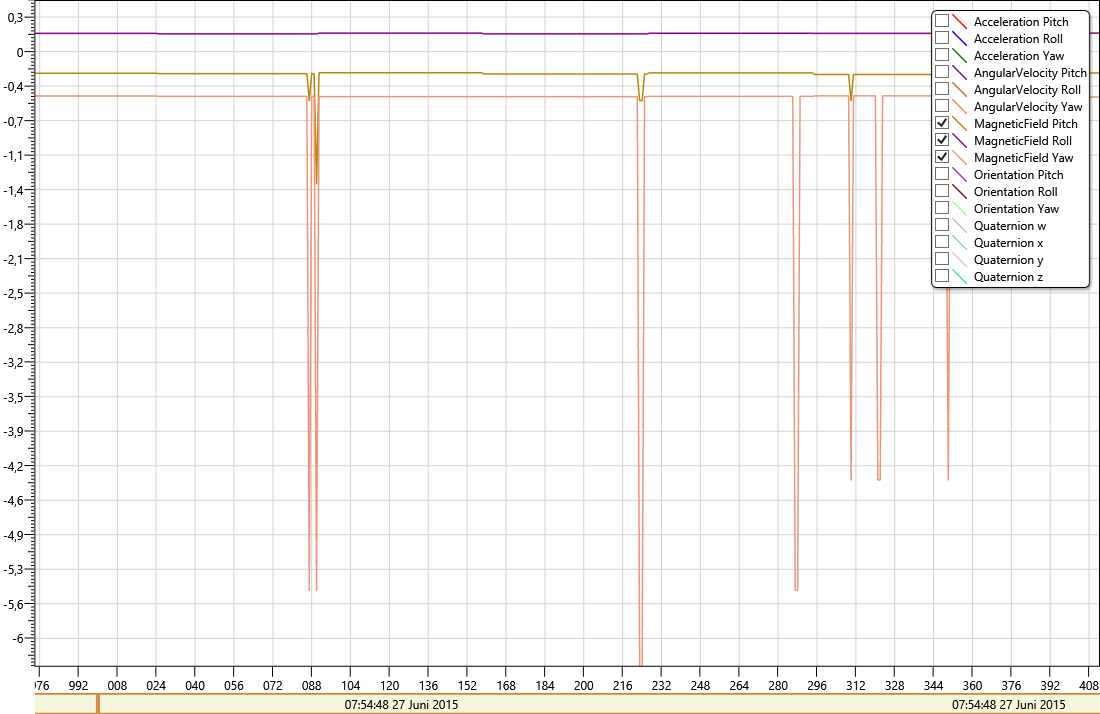
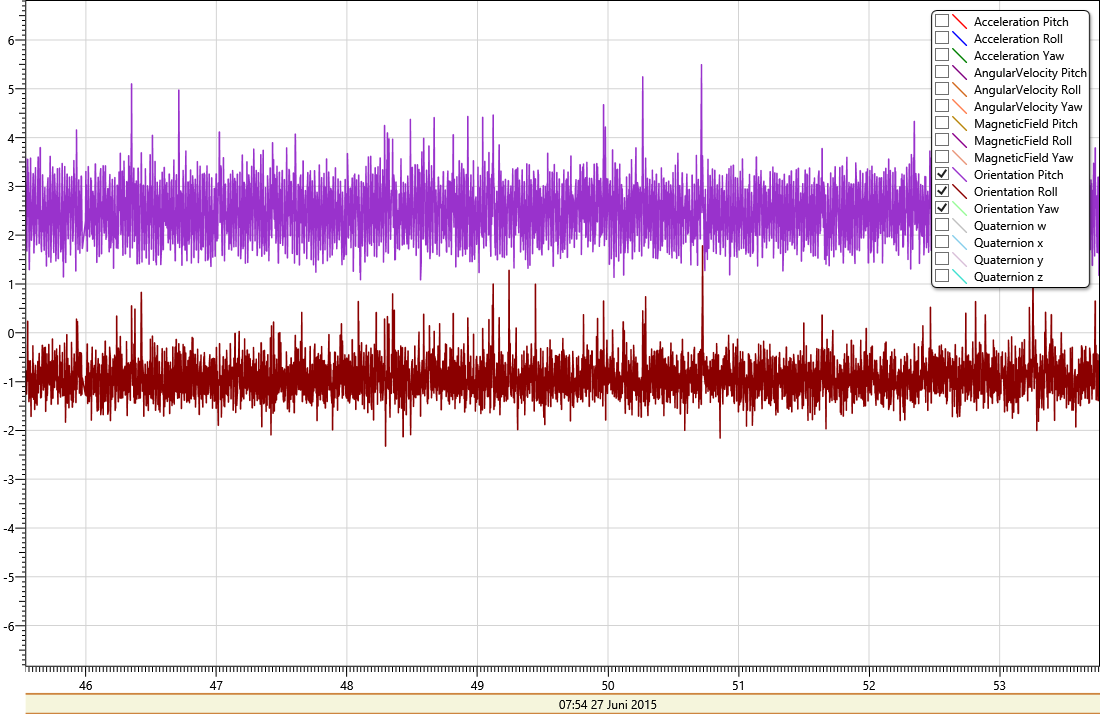
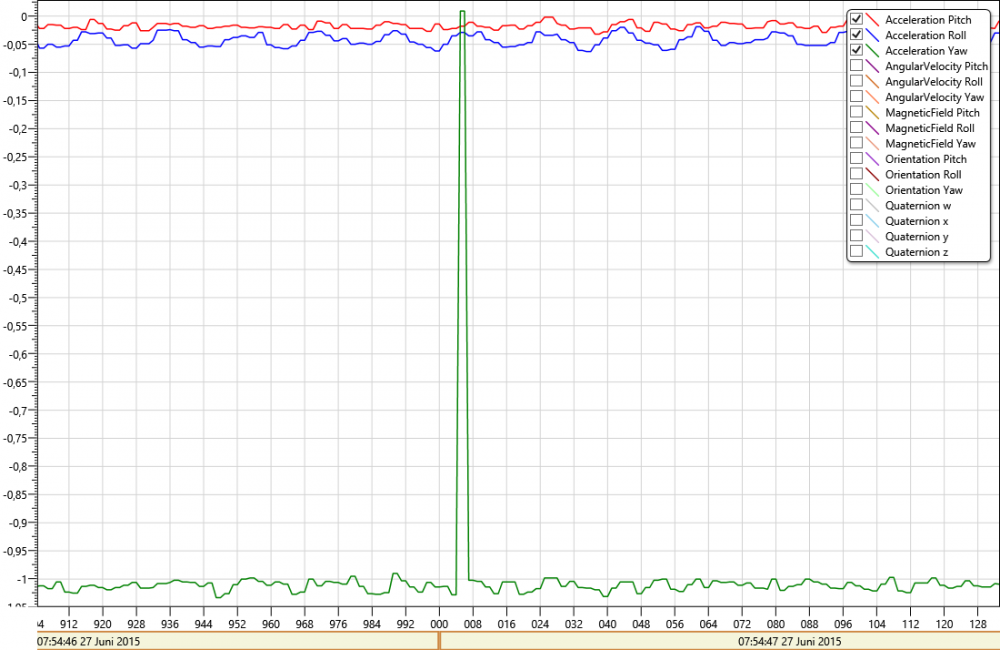
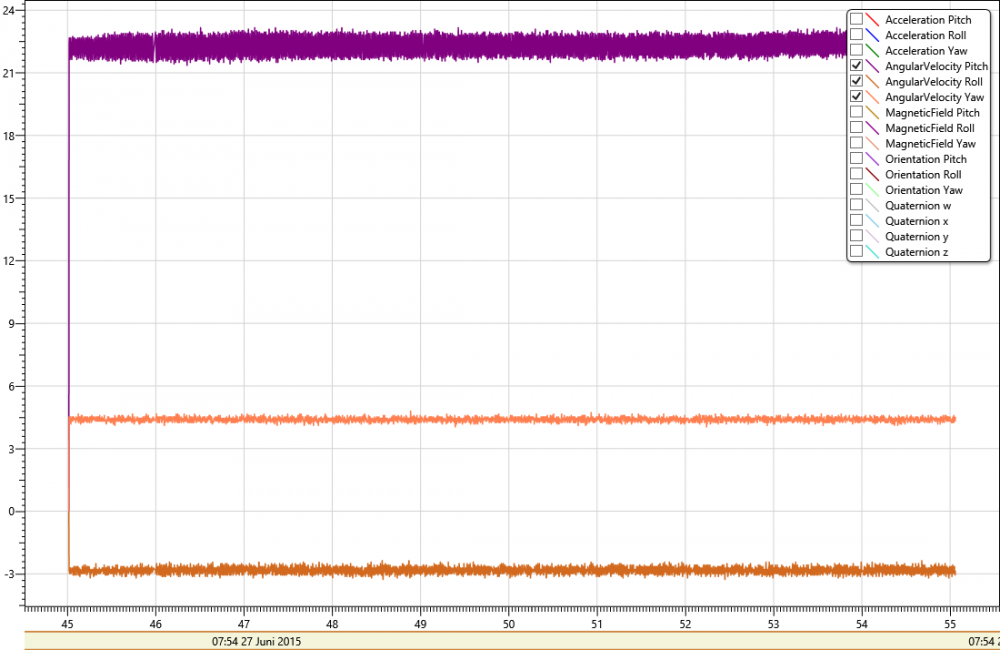
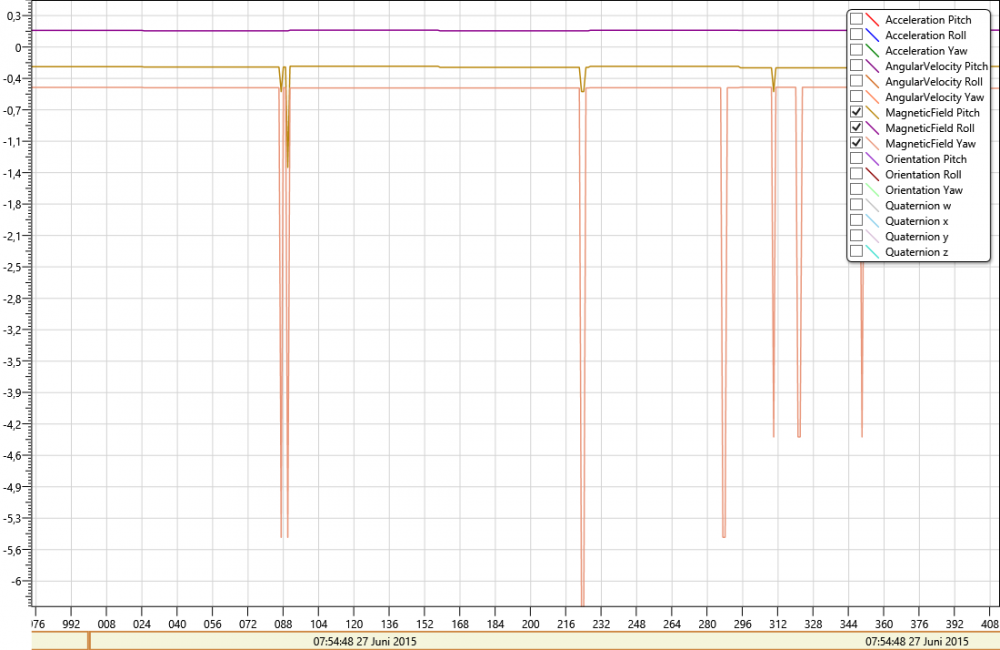
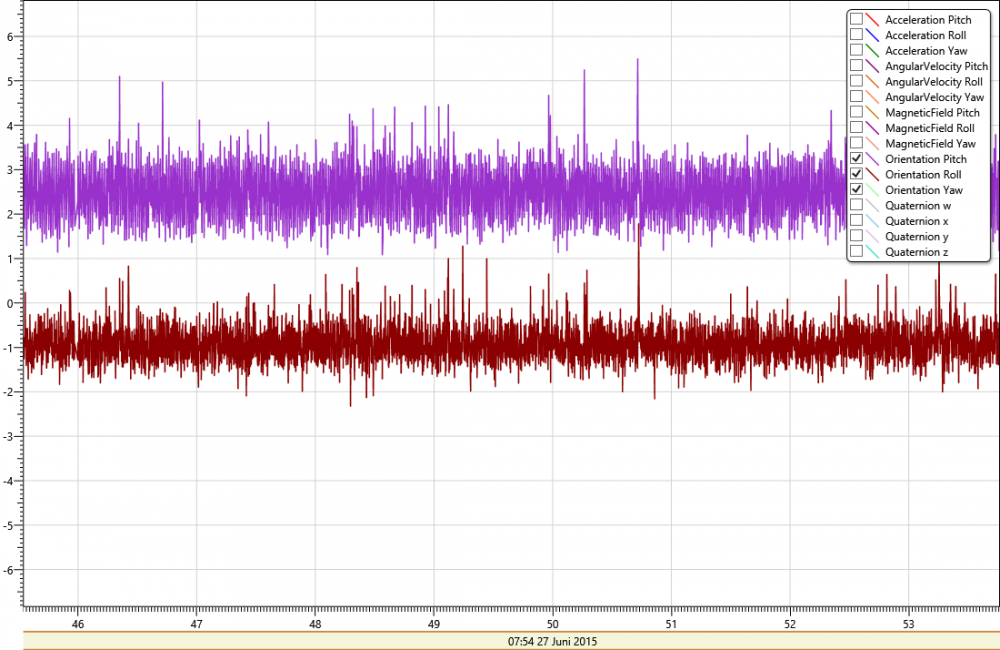
Hallo, irgendwie komm ich nicht weiter .... ich habe jetzt einen logger eingebaut und jeden Zyklus (2ms) aufgezeichnet. Man kann die "Ausschläge" sehr gut erkennen. Weiterhin habe ich sehr starkes Rauschen auf den Gyro und Acc wodurch die Eulerwinkel extrem rauschen (+-1°)!!!. Habe schon kalibriert, .. wieder auf Factory gesetzt, ... keine Besserung Jemand eine Idee? Hier die Bilder ...
-
HiHo, ja von der Performance ist das alles recht grenzwertig, ich überlege die IMU und servo firmware zu modifizieren, damit ich Quaterionen + Alldata und alle 4 Servos jeweils in „einem Rutsch“ übertragen kann. Der IMU2 API hat ja schon ein Alldata mit Quaterion + 9DOF in einem callback - nur leider noch nicht verfügbar. Derzeit habe ich folgende Performance Werte (OdroidXU Octocore): -Nur Quaternion: 730Hz -Quaterion + 9dof Alldata: 700Hz -Quaterion + 9dof Alldata + 4x Servoansteuerung: 270Hz Gruß Gnu edit: Habe auch mal synchrone calls getestet, die Performance halbiert sich
-
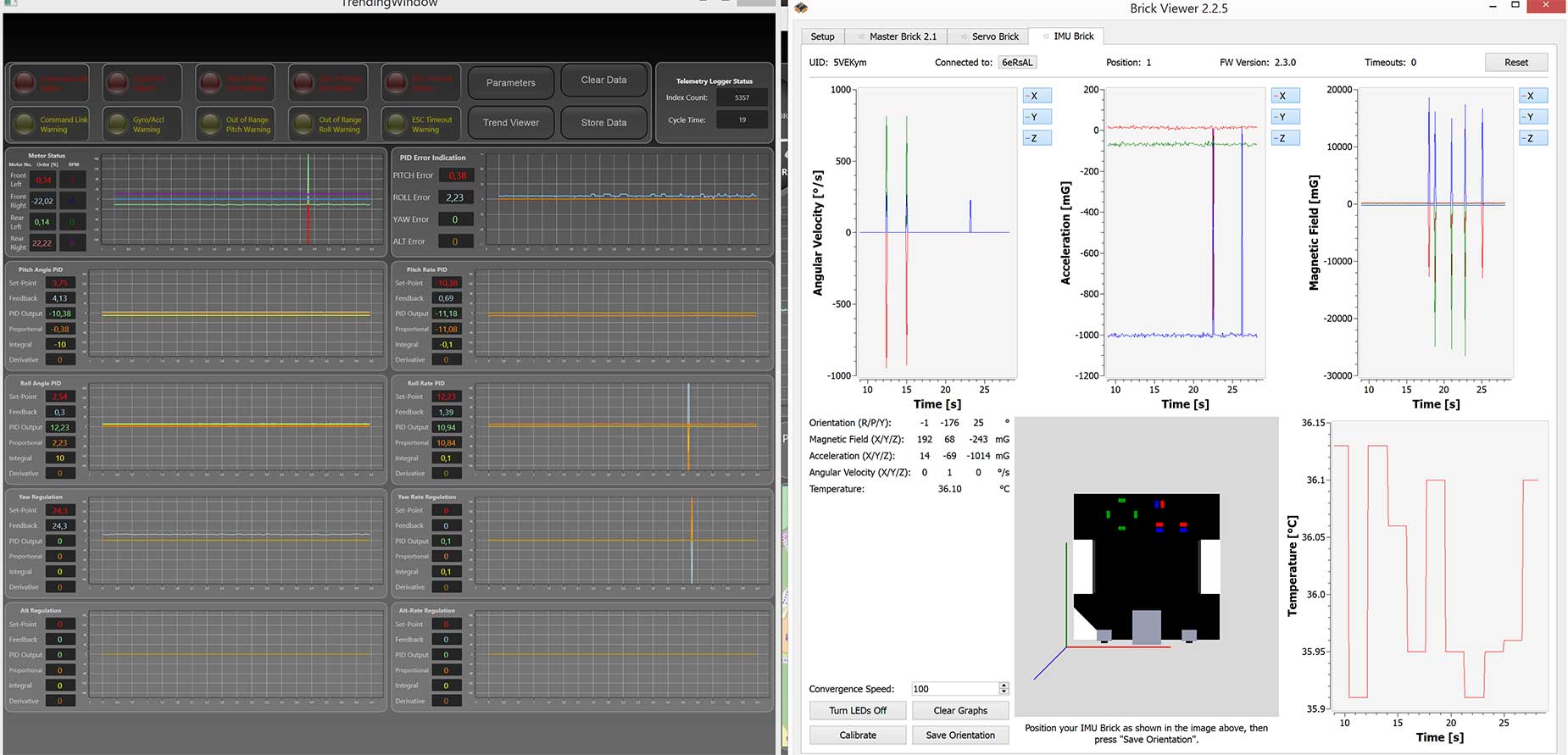
Hallo, ich verwende den IMU und Servo Brick für meinen Quadrocopter. Folgendes Problem: Setze ich die Callbacks von SetQuaternionPeriod und AllData auf „2“ (2ms) habe ich ständig Störungen die dazu führen das meine Regler Purtzelbaum schlagen. Ich vermute da wohl den Fehler in der Filterimplementation. Leider kann ich auch nicht über 2ms gehen da sonst die Stabilität nicht mehr gewährleistet wird. Sobald ich auf 100ms gehe ist alles i/o. (siehe Screeni mit Brickviewer Trend) An den SetConvergenceSpeed Werten habe ich schon gedreht, ohne Erfolg. Hat wer eine Idee? Gruß Gnu