RonHa
Members
-
Benutzer seit
-
Letzter Besuch
-
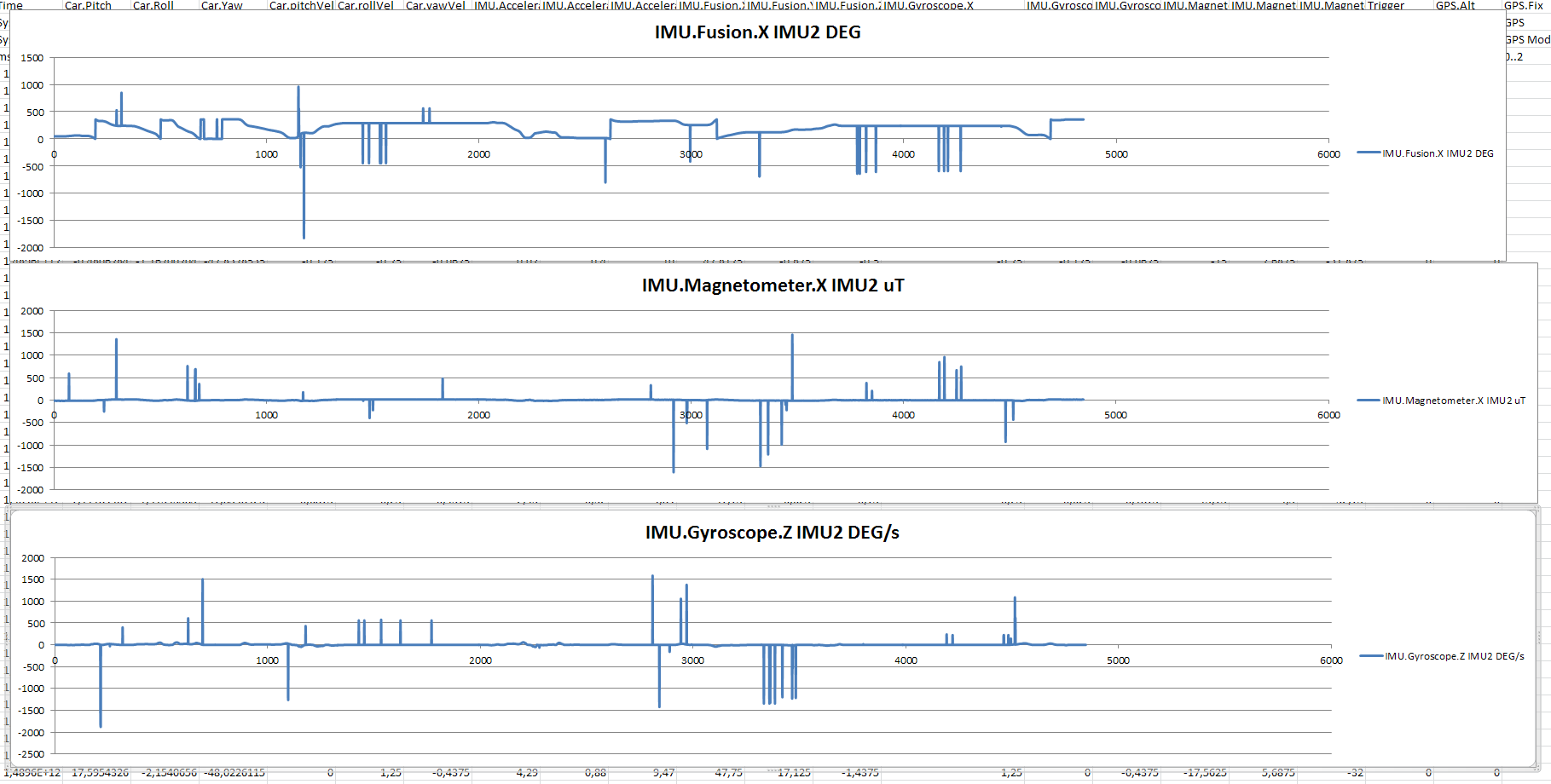
Wir haben noch einige Testfahrten durchgeführt und festgestellt, dass der IMU auf dem Master nach wie vor sporadische Fehler erzeugt. Das Problem taucht sowohl im Accelerometer, Gyroskop als auch im Magnetometer des IMU auf. Aber nicht reproduzierbar und unvorhersehbar!
-
Wir haben da ja scheinbar einen relativ speziellen Einsatzzweck für die Sensoren. Wir nehmen zum testen auch gern ein Testpaket aller Sensoren von euch für unser Fahrzeug ;-) Wir testen nächste Woche noch einmal ausgiebig und würden uns bezüglich des Master/IMU Problems nocheinmal melden. Für uns ist das auch nicht reproduzierbar, da es sehr sporadisch auftritt. Danke erst einmal für die Hilfe.
-
TestPC: Masterfirmware: 2.4.3 IMU2firmware: 2.0.7 Master unten und IMU oben. USB am Master. Keine Bricklets angeschlossen Im Fahrzeug war das selbe Prinzip aber mit ACC- und GPS-Bricklet am Master und IMU2firmware 2.0.6
-
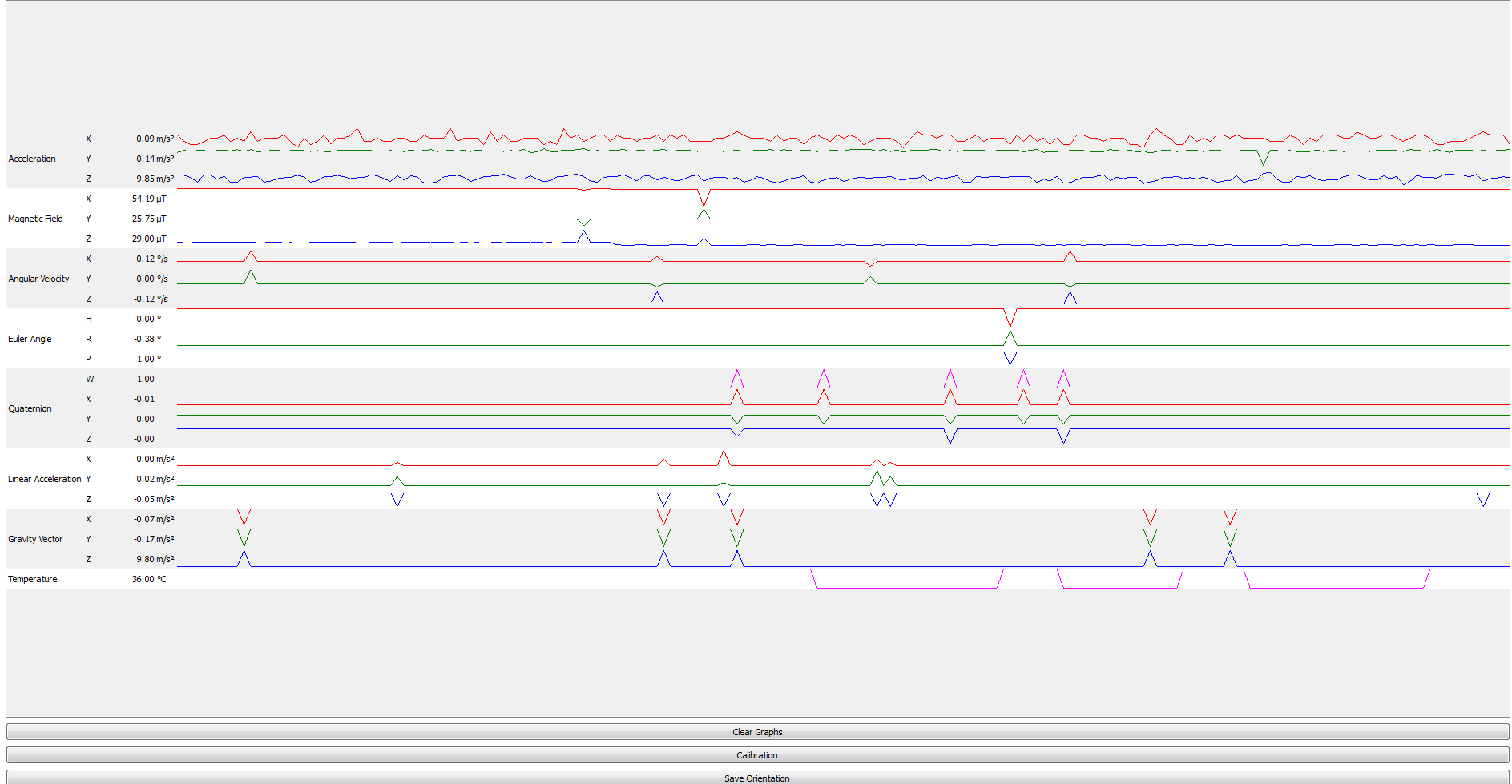
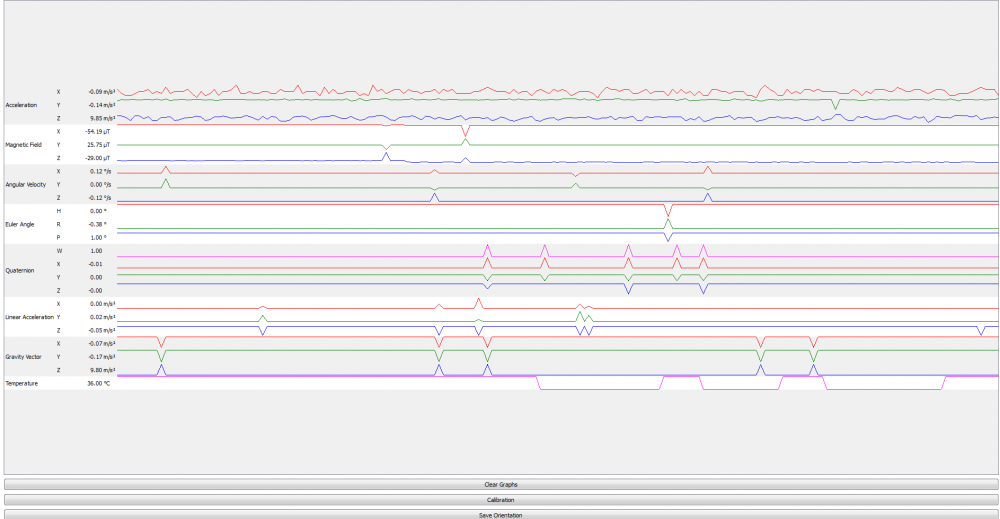
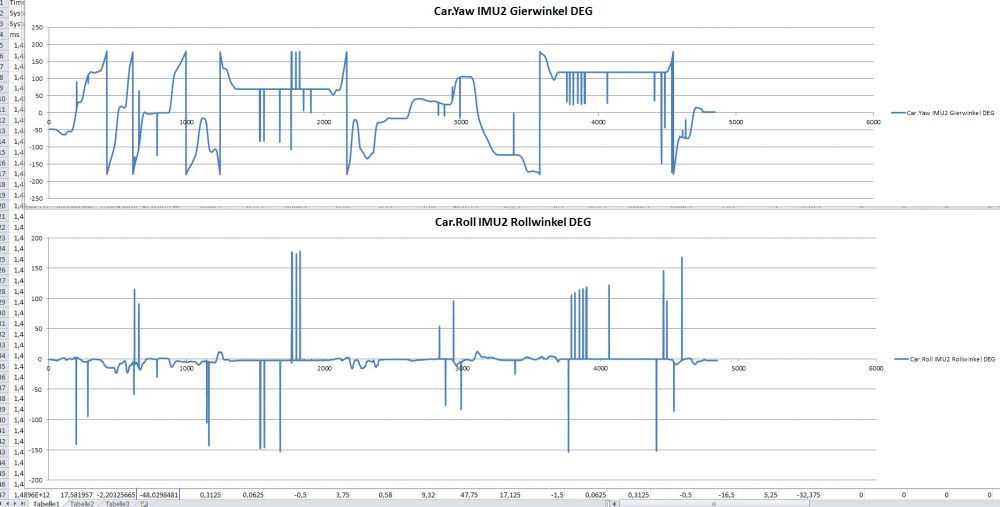
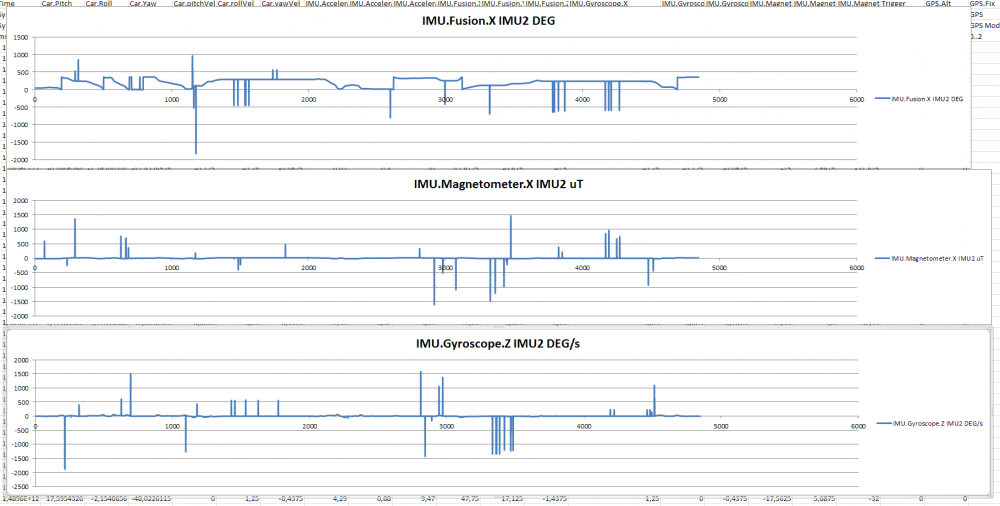
Im Anhang sehen Sie einen Screenshot aus dem Brickviewer meines Kollegen. Die Daten die ich in einem vorhergehenden Post zeigte stammten aus unserem Fahrzeug. Diese jetzt vom Rechner des Kollegen. Die Sensoren lagen dabei auf dem Tisch in Ruhe. Alle Ausschläge die Sie sehen, sind die besagten Fehler.
-
Wir nutzen eigentlich immer die aktuellste Firmwareversion
-
Wir haben ebenfalls festgestellt, dass beim Betrieb des IMU2.0 auf einem Masterbrick Störsignale entstehen. Siehe Anhang. In den Rohdaten ist zu sehen, dass die Fehler sowohl im ACC, Gyro als auch Magnetometer des IMU2.0 auftreten
-
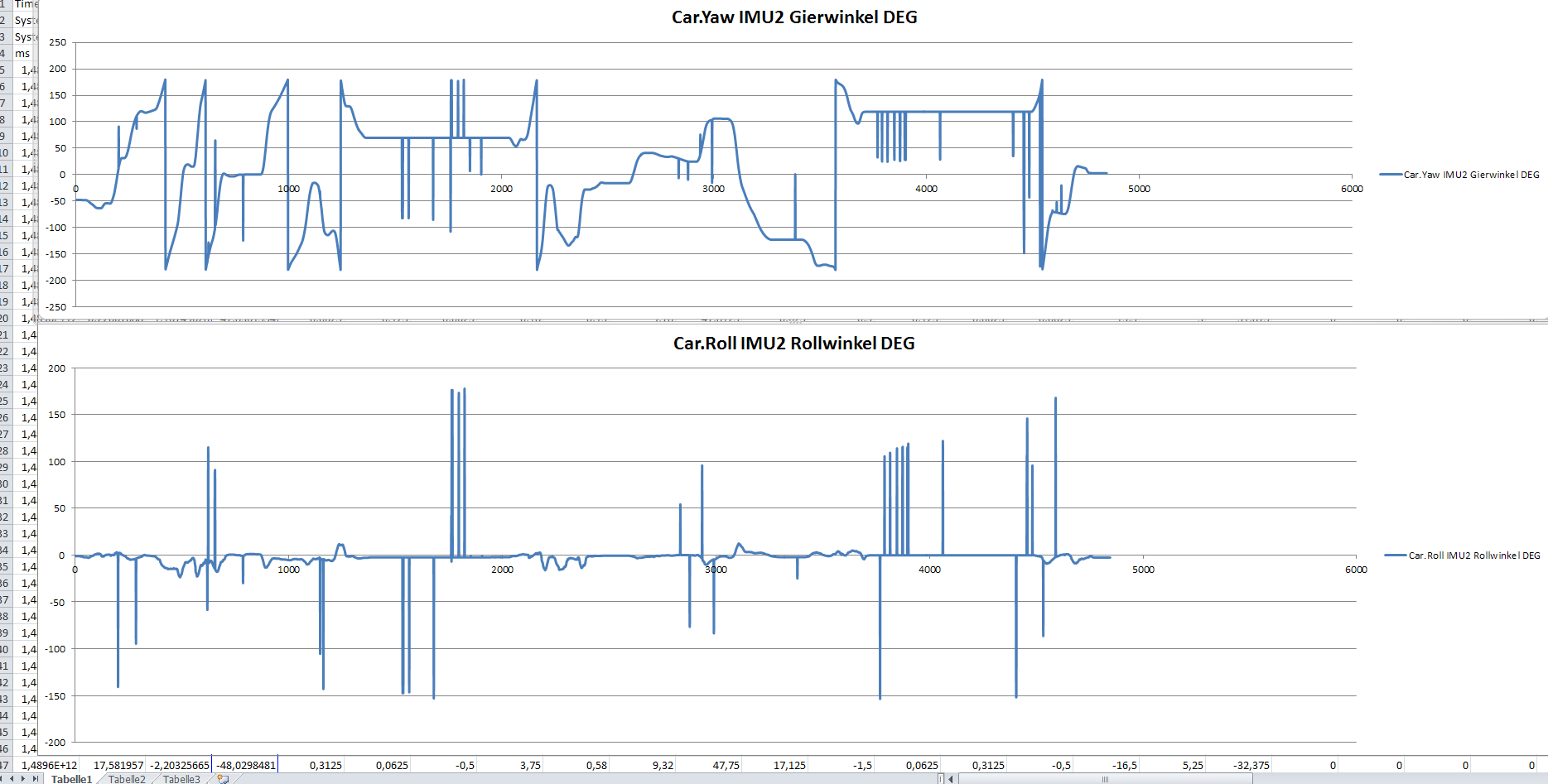
Gibt es eine Möglichkeit einen Winkel zu berechnen ohne, dass die Beschleunigswerte mit Einfluß haben? Das funktioniert nämlich nicht bei z.B. Kurvenfahrt, da hier ja Beschleunigungen erzeugt werden, die nicht Neigungsabhängig sind. Das verursacht bei uns das Problem, dass der Roll- und Nickwinkel ständigen großen Änderungen unterliegen, die vorallem bei Kurvenfahrten bzw. starken Verzögerungen auffallen.Der Rollwinkel z.B. steigt kontinuierlich beim durchfahren einer Kurve. Ist der IMU dazu in der Lage eine querbeschleunigungsunabhängige Neigung anzuzeigen?
-
Wir nutzen einen IMU 2.0 in einem Fahrzeug als Fahrdynamiksensor. Bisher liefert dieser aber keine exakten Daten. Problem 1: Der IMU 2.0 behält keine Kalibrierung im Fahrzeug. Wir kalibrieren diesen bei laufendem Motor, bis alle Kalibrierungsfenster grün sind, speichern die Kalibrierung und montieren den IMU wieder. Kaum montiert ist die Magnetometerkalibrierung im Eimer und währen der Fahrt ist der ACC-, Magnetometer- und Systemkalibrierungsstatus immer rot also unkalibriert. Problem 2: Wir bekommen keine sinnvollen Roll- und Nickwinkel zustande. Unsere Werte scheinen irgendwie abhängig vom Yaw zu sein (In Kurvenfahrt steigt der Roll- und auch der Nickwinkel) Wir sind echt ratlos. Wir nutzen noch ein ACC-Bricklet, dieses funktioniert sauber und liefert im Vergleich zur IMU Top Werte