aortner
Members
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von aortner
-
ok ich werde es mit imu.SetSensorFusionMode(2); probieren.
-
Roll brauchen wir für den hangausgleich da das gps recht hoch montiert ist. Mit imu heading versuchen wir heading zu stabilisieren wie es zb Mit 2 gps Antennen gemacht wird. Hilfe und Ideen sind willkommen! Was meinst du mit Kompass?
-
Ok Danke- bin neu bei der Sache. Derzeit ist nur der callback programmiert alles andere Standard. Vermutlich hat sich die imu dort neu kalibriert.
-
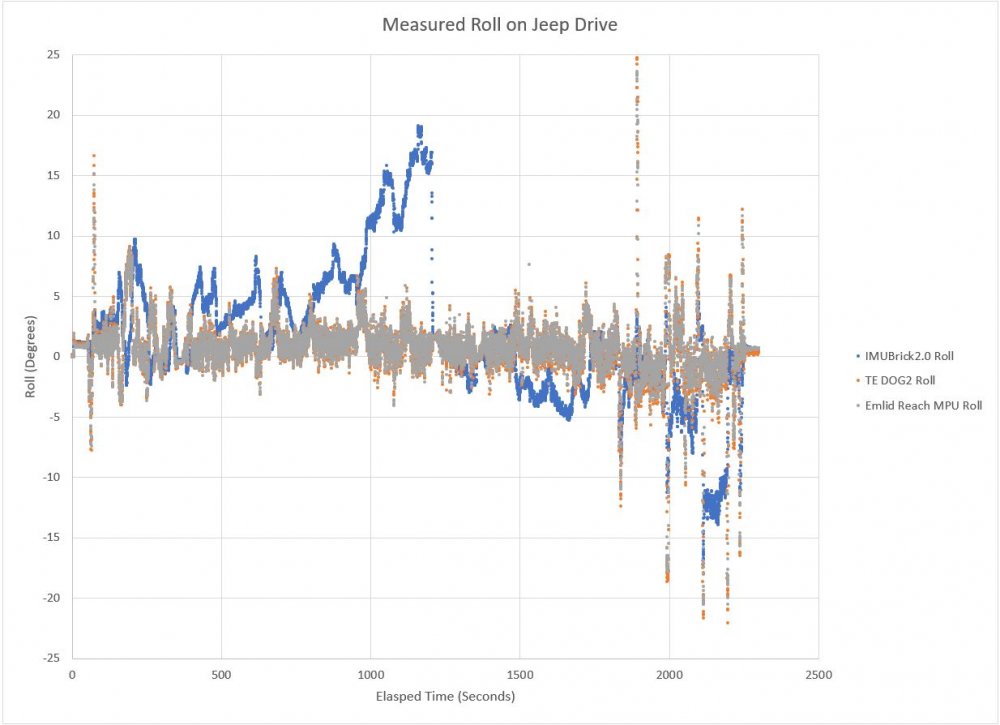
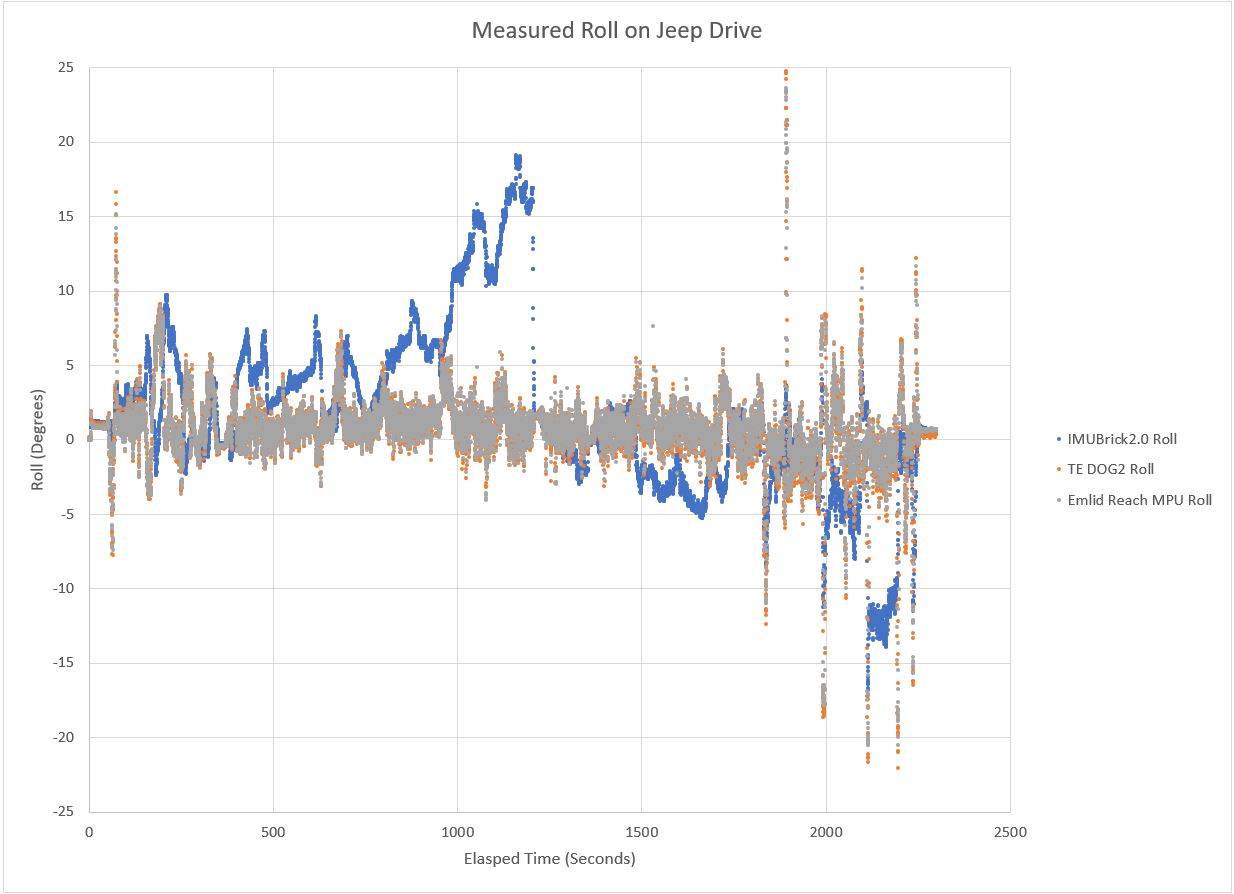
Derzeit sind das nur 3 Vergleichswerte zw. Imu brick , dog2 (analog) und mpu9250 des Emlid reach gps. Sensor Fusion führen wir noch keine durch .
-
Hallo. Ich möchte dem imu brick 2 benutzen um mein GPS zu korrigieren. Ich brauche es für einen Landwirtschaftlichen Zweck. Dazu brauche ich ein stabiles Heading und Roll um den Hang auszugleichen. Bei unseren Test stellten wir ein relatives großen Drift beim Roll fest. Wir benutzen IMU_V2_CALLBACK_ORIENTATION um die Daten auszulesen. Woran kann das liegen?