msa78
Members
-
Benutzer seit
-
Letzter Besuch
-
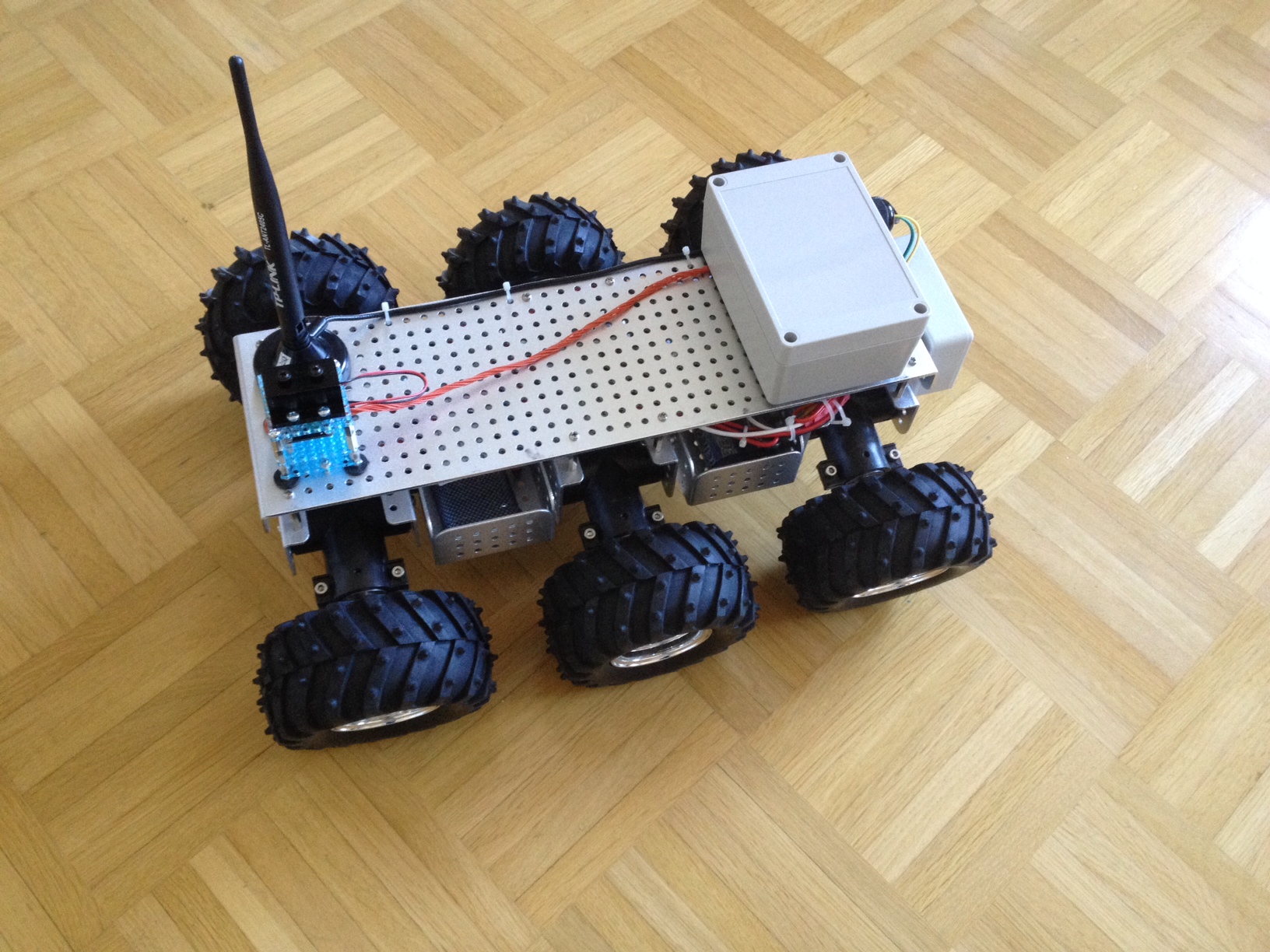
Nach über einem Jahr nach Thread-Erstellung habe ich mein Vorhaben in die Tat umgesetzt und bin nach drei Paketsendungen von Tinkerforge, Conrad und EXP-Tech stolzer Besitzer eines Dagu Wild Thumper 6 WD inkl. allerlei Zubehör. Nach einem Tag im Bastelkeller und knapp 2 Tagen vor dem Python-IDLE konnte ich das erste Mal mit dem Ding über die große Wiese fahren. Heute habe ich mir einen 25mW 5,8GHz Sender + Empfänger inkl. Kamera von einem FPV-Ausstatter bestellt und freue mich schon auf die Erweiterung des 6WD. Nachträglich möchte ich mich bei Euch allen für die Tipps, Tricks und freundliche Hilfestellung herzlich bedanken. Leider bin ich mir bei der ESC-Ansteuerung noch etwas unsicher, was die Konfiguration des Servo-Bricks angeht. Der 6WD fährt zwar mit der von mir gewählten Konfiguration, allerdings "pfeiffen" die Motoren solange ich den "Position"-Wert unter ca. 2000 halte. Ab ca. 2500 fährt der 6 WD ohne sichtbares Stottern los... Ich bin irgendwo darüber gestolpert, dass es evtl. an "Period" liegen kann. (?) In dem Python-Script verändere ich keinen weiteren Wert, sondern arbeite nur mit dem Ein-/Ausschalten der Servos und dem setzen von "Position". Als Eingabegerät habe ich einen alten XBOX-Controller verwendet, der entsprechend der Achsen-Werte der Joysticks den Wert für "Position" in der Programmschleife ändert. Beispiel: (Wenn Joystick-Achse(1) >0.2 und <0.4 ist, dann setze "Position" für Servo 0+1 auf 3000) Wie gesagt, er fährt - allerdings mache ich mir doch ein paar Gedanken bezüglich der Ansteuerung und hoffe sehr, dass mir jemand seine Erfahrungen zu dem Thema mitteilen kann. Ich habe etwas "bammel", mit allen Variablen zu spielen um mir dann neue ESCs bestellen zu müssen :-) Als ESC verwende ich 2x : http://www.conrad.de/ce/de/product/207369/Modelcraft-B4230-Carbon-Series-Fahrtregler-Belastbarkeit-54-A-35-A-25-A-Motorlimit-20-Turns-380er-Motoren?ref=searchDetail Ich bin Euch für jede Hilfe dankbar. Beste Grüße, Micha
-
Hallo, @Malik - Danke, habe mich da bereits mal umgeschaut. @remotecontrol - das wäre nett. Bin für jede Information dankbar. @raphael_vogel - danke für die Info. Mit dem 4WD habe ich auch geliebäugelt. Hut ab - das sieht alles sehr gut aus. Der DMC01 hat ja zwei Ausgänge für Motoren. Hast du die beiden Motoren pro Seite zusammen angeschlossen, oder hast Du noch einen zweiten ESC ? Hast Du mit dem 4WD schon Erfahrungen im Outdoorbereich gesammelt ? Ich habe einen Händler gefunden, der den 4WD zusammen mit dem Greifer für 129.- Euro anbietet. Bin etwas unentschlossen, ob ich den 4WD oder den 6WD nehme. Wenn ich die drei Motoren des 6WD parallel an den ESC anschliessen könnte, würde ich mich dafür entscheiden.... Falls ich pro Motor einen ESC benötige, sprengt das mein momentanes Budget ^^
-
Ich selbst habe mich bisher nicht mit Modellbau beschäftigt - daher sind die Fahrtregler für mich unbekanntes Terrain. Auch wenn es dreist klingt, kann mir evtl. jemand bei der Realisierung behilftlich sein / kennt sich hier jemand mit diesen Fahrtreglern aus und kann mir eine Hilfestellung geben ? Speziell würde mich interessieren, welches Gerät für den besagten Einsatz sinnvoll ist - und was ich evtl. noch beachten muss. Ansonsten werde ich mich mal an ein RC-Forum wenden. Vielen Dank & Grüße Micha
-
@batti: Danke, ich hatte das mit der eigentlichen "Last" verwechselt... Wenn ich die Motoren mit der DC-Brick nicht "auf 100%" laufen lasse, kann ich den Verbrauch ja auch entsprechend regulieren. Ich werde mir den Wild Thumper mal ordern und es versuchen. Ansonsten werde ich mir das Thema RC-Fahrtregler mal anschauen. Gruß
-
Danke für die schnelle Antwort. Wenn ich das richtig verstehe, steuer ich den ESC dann mit der Servobrick an / Die DC-Bricks werden nicht mehr benötigt ?!
-
Hallo, als "Prototyp" für meinen Roboter verwende ich momentan eine RP5 Plattform mit Kettenantrieb von Conrad. Für die ersten Gehversuche war die Plattform ideal - allerdings ist sie definitiv nicht für den Aussenbereich geeignet und kann auch nur eine überschaubare Last transportieren. Bei der Suche nach einer stabilen Alternative bin ich auf den "Dagu Wild Thumper 6WD" gestoßen. Sieht für mich sehr stabil aus und hat auch nur positive Bewertungen erhalten. http://www.exp-tech.de/robot/UGV/dagu-wild-thumper-arduino-210.html Allerdings habe ich eine (dumme) Frage: Momentan habe ich die beiden Motoren des RP5 an jeweils einen DC-Brick angeschlossen und versorge den Stack mit einem 7.2V RC-Akku. Der Wild Thumper verfügt insgesamt über 6 Motoren. Kann ich diese parallel an einer DC-Brick betreiben ? (jeweils 3 pro Seite an einer Brick) ? Spezifikationen: Size: 420 × 300 × 130 mm (16.5" × 12" × 5") Weight: 2.7 kg (6.0 lb) Ground clearance: 60 mm (2.5") when lightly loaded Maximum recommended payload: 5 kg (11 lb) Recommended motor voltage: 2 – 7.5 V Stall current at 7.2 V: 6.6 A per motor No-load current at 7.2 V: 420 mA per motor No-load output shaft speed at 7.2 V: 160 RPM for the version with 75:1 gearboxes Stall torque at 7.2 V: 11 kg-cm (160 oz-in) per motor for the version with 75:1 gearboxes Die Leistungsaufnahme (Stall current) liegt bei 6.6 A pro Motor... Laut Spezifikation DC-Brick sind dort dauerhaft >3A und Peak 5A (kurzfristig!) möglich. Soweit ich das überblicke, ist mein "Vorhaben" mit der parallelschaltung nicht möglich... Kann mir evtl jemand einen passenden Denkanstoß geben, wie ich das ganze von dem RP5 auf den WildThumper portieren kann ? Oder hat evtl. jemand ein anderes Fahrgestell im Auge / bzw. bereits im Einsatz ? Vielen Dank & Gruß, Micha