__Alex__
Members
-
Benutzer seit
-
Letzter Besuch
-
Danke für die Antworten. Den git Link kannte ich noch nicht. Das hilft aber auch schonmal.
-
Hi Tinkerforge, bisher habe ich die API immer manuell herunter geladen, in einen entsprechenden Ordner kopiert, mit meinem eigenen Quelltext verknüpft und dann weiter ver-/gearbeitet. Habt ihr auch die API unter z.B. subversion Versionskontrolle? Sodass ich einen normalen checkout durchführen und dadurch immer auf die letzte gültige Version zugreifen kann? Das würde die Wartung des Quelltextes sehr beschleunigen. Gruß Alex
-
Hi, Die KI basiert auf einer Eigenentwicklung und nutzt ein Differentialgleichungssystem, welches sich pro Simulationsschritt an sich ändernde Randbedingungen anpassen kann. Die Kopplung mit dem IMU2 funktioniert auf dem Papier aber noch nicht in "real-life". Der Quelltext ist auf sourceforge.net gehostet und ich habe ihn unter der GPL veröffentlicht. Allerdings ist das alles ohne Einweisung recht umständlich, da es sich ja nur um ein Freizeitprojekt handelt. Der Quelltext für die Tinkerforge API ist aber noch nicht veröffentlicht. Ich müsste da evtl. ein neues Repository aufsetzen. Mitarbeit ist natürlich erwünscht, aber da müsste man sich wahrscheinlich intensiv austauschen. Der reine Druck des Roboters (also nur das Gehäuse so wie er auf den Bildern ist) hat Material-, Verschleiß- und Produktionskosten von etwa 600€. Dazu kommen Schrauben, Kugellager und ich würde die Servos ebenfalls noch dazurechnen, was nochmal etwa 300€ ausmacht. Da es noch keine Anleitung gibt, würde ich ihn komplett zusammenbauen und in einer schönen Box verschicken. Ich könnte aber auch tatsächlich erst einmal Einzelteile zum Testen drucken. Das wäre dann zum Beispiel ein Bein mit 3 Freiheitsgraden und der Tinkerforge Flansch. Damit könntest du schonmal experimetieren ohne gleich in die Vollen zu greifen. Mit Servos 250€. Einen Flansch für Arduino, Raspberry oder andere Entwickler-Boards habe ich noch nicht, lässt sich aber mit wenig Aufwand schnell entwickeln (Design etwa 1 Woche). Gruß ___Alex___
-
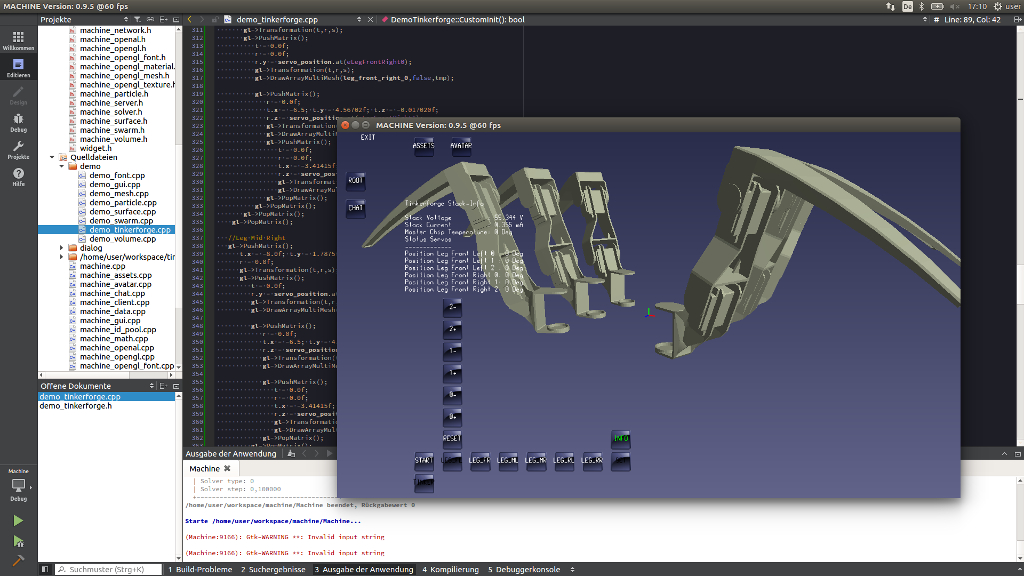
Die Software ist in C++ geschrieben und nutzt ein selbst entwickeltes Framework, welches viele Bibliotheken von Qt benutzt. Die Tinkerforge API ließ sich ohne Probleme implementieren. Da haben die Entwickler wirklich schöne Arbeit geliefert. Die Steuerung der Servos läuft über die Servobrick API und ist noch recht statisch. Grundbewegungsmuster sind: vorwärts, rückwärts, links herum, rechts herum. Die Bewegungsmuster werden anschließend mit der KI und dem IMU Brick verknüpft, sodass der Roboter selbst entscheiden kann, wie er laufen muss. Leider ist durch die 2 Freiheitsgrade pro Bein die Bewegung etwas eingeschränkt. Ein 3 Freiheitsgrad-Bein ist aber schon in der Entwicklung. Bei Interesse oder mehr Details, schreib mir ruhig eine PM oder Mail. Gruß __Alex__
-
Das Software-Grundgerüst ist nun in einem fortgeschrittenen Zustand. Die ersten, zugegeben etwas abgehackten Bewegungen seht ihr hier im Video. http://uniqthings.de/robots/robot_01_ogv.html Im nächsten Projektschritt wird die Software auf den Red-Brick transferiert, damit ich das USB Verbindungskabel los werde. Gruß __Alex__
-
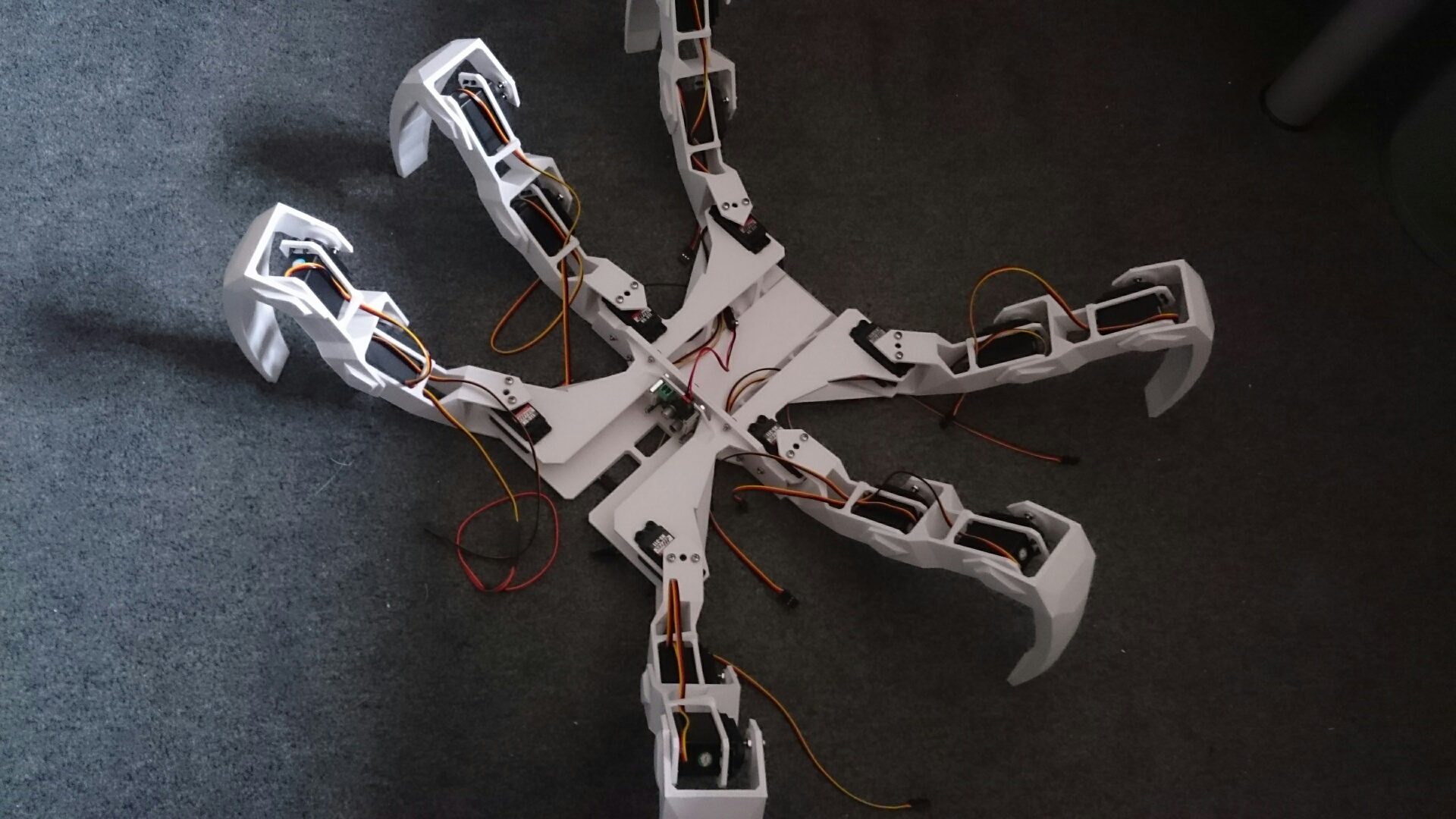
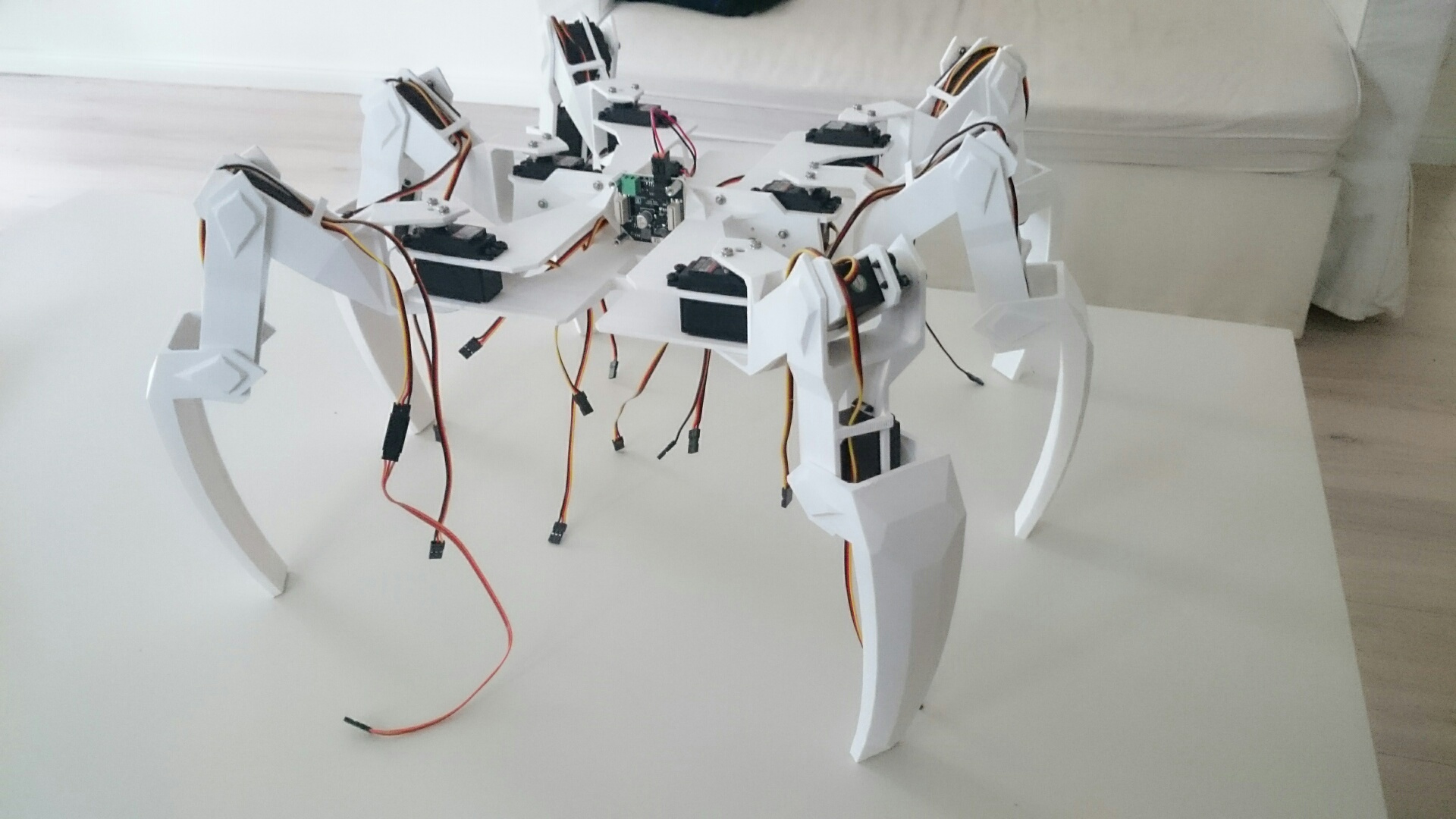
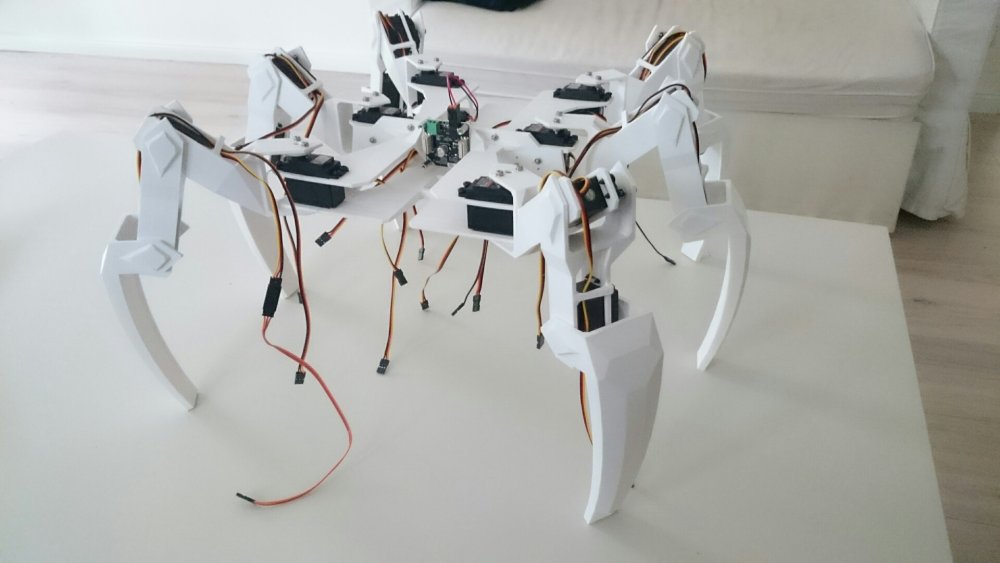
Nach einiger Zeit Pause hier ein paar Infos zum Projektstatus: Die vorige Version des Hexapoden hatte diverse Design- und Gewichts-Probleme. Zudem waren nur Analog-Servos verbaut und die gesamte Konstruktion war sehr unflexibel hinsichtlich Änderungen und Komponententausch, bzw. Reparatur. Daher habe ich das Design komplett neu aufgesetzt und um wesentlich kleinere Digital-Servos konstruiert. Die von dir vorgeschlagene Version mit den Bowdenzügen habe ich lange versucht geschickt umzusetzen, bin dann aber zu dem Schluss gekommen, dass ich Flexibilität im Design mehr Priorität geben möchte. Daher habe ich mich voll auf die modulare Konstruktion konzentriert. Hier zwei Bilder von dem derzeitigen Ergebnis. Darin sieht man, dass der Roboter im Grunde aus generischen Bauteilen besteht, die wie Bausteine zusammengeschraubt werden können. Das Design hier hat nur 2 Freiheitsgrade pro Bein, es ist aber auch leicht möglich 3 Freiheitsgrade umzusetzen. Den Tinkerforge Kopf könnte man auch mit Arduino Elementen umsetzen; ich habe auch schon überlegt ein Raspberry Element zu konstruieren. Maximale Flexibilität also.

-
Hallo Jürgen, es wird noch einen Deckel geben, der aber noch nicht fertig ist. Da kann Nutzlast transportiert werden. Ich habe vorne, links, rechts und oben Ebenen für die Sensoren und Flansche für Greifer vorgesehen. Kabelschlitze führen dann die Kabel zu den Bricks. Heute war "Power On". Ich habe ein wenig Bedenken, dass die Servos eventuell zu schwach sind und der Stromverbrauch scheint mir sehr hoch. Viel zusätzliches Gewicht wird wahrscheinlich nicht effektiv möglich sein. Eigengewicht sind 2 bis 3 kg (je nach Akku). 300 bis 400g Nutzlast sollte noch drin sein. Aber das weiß ich erst, wenn ich die Stromversorgung durchgemessen habe und die ersten Schritte vorwärts funktionieren. Gruß A.

-
Hallo Jürgen, danke fürs Interesse. Das Projekt ist ja noch ein wenig im Prototypenstadium. Z.B. lassen sich einige Schrauben nur sehr schwer erreichen, die Servotaschen sind noch auf eine einzige bestimmte Servo-Art ausgelegt, es fehlen noch Löcher für die Servo-Verbindungen, die nachgebohrt werden müssen und es gibt noch Details, die wirklich vorsichtig zusammengesetzt werden sollten. Wenn du mir noch ein wenig Zeit gibst würde ich die Design-Fehler beseitigen. Zudem brauchst du dann noch eine Bauanleitung. Nach zu kaufen wären Schrauben, Kugellager, Servos, Verlängerungskabel, Akku und Bricks. Und am Schluss fehlt noch die Software... Ich würde den Preis des Chassis etwa bei 350€ ansetzen (3 Rollen PLA, Verschleiß beim Drucker, Bauanleitung+Stückliste, Kugellager und Schrauben) - die Druckzeit liegt bei knapp 50 Stunden; Servos und Bricks... naja, da kann man viel Geld für ausgeben - aber das hast du ja selbst. Gruß A.
-
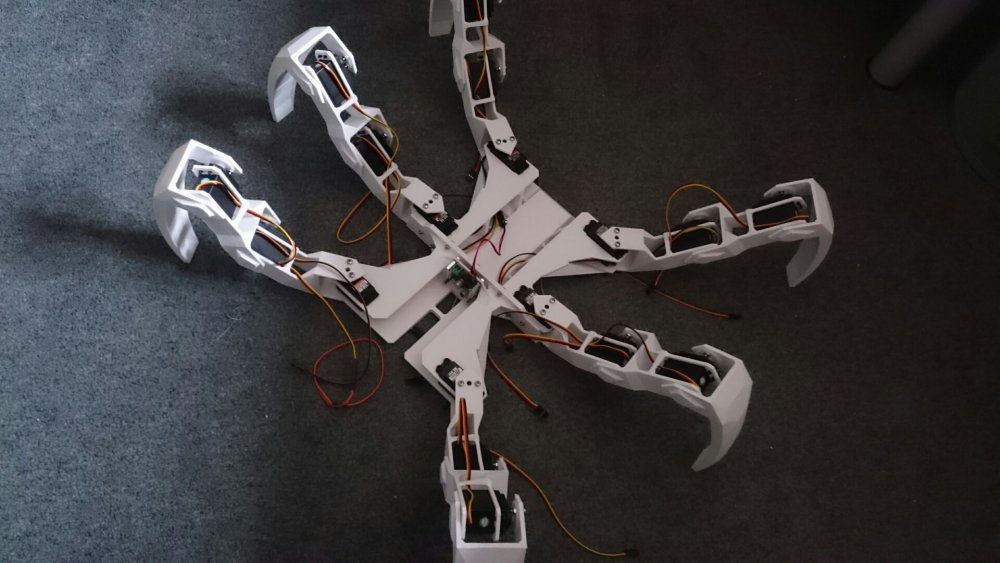
Mechanical Assembly finished. Der Projektstatus hat den ersten großen Meilenstein passiert. Die Konstruktion besteht aus 20 Strukturteilen, die vollständig mit dem 3D Drucker erstellt wurden. Servos und Bauteile sind verschraubt und die Verkabelung ist ebenfalls vorhanden. Beim Zusammenbau habe ich leider einen Servo-Brick zerstört, der aber bereits nachbestellt ist. Der Brickstapel ist zur Zeit 6 Bricks groß: Step Down, Master, 3x Servo, IMU. Es zeigt sich, dass die Stromversorgung mit dem von mir ausgewählten Akkustapel zu gering war. Ich muss auf LiPo Akkus umsteigen. Aber die Akkubank im hinteren Rumpf sollte genügend Platz haben. Abmaße (HxBxT): 40cmx50cmx50cm im Stand 15cmx50cmx50cm liegend, Arme angewinkelt 15cmx80cmx60cm liegend, Arme ausgestreckt Gewicht: etwa 2kg ohne Akkus und Bricks Hier ein paar Fotos

-
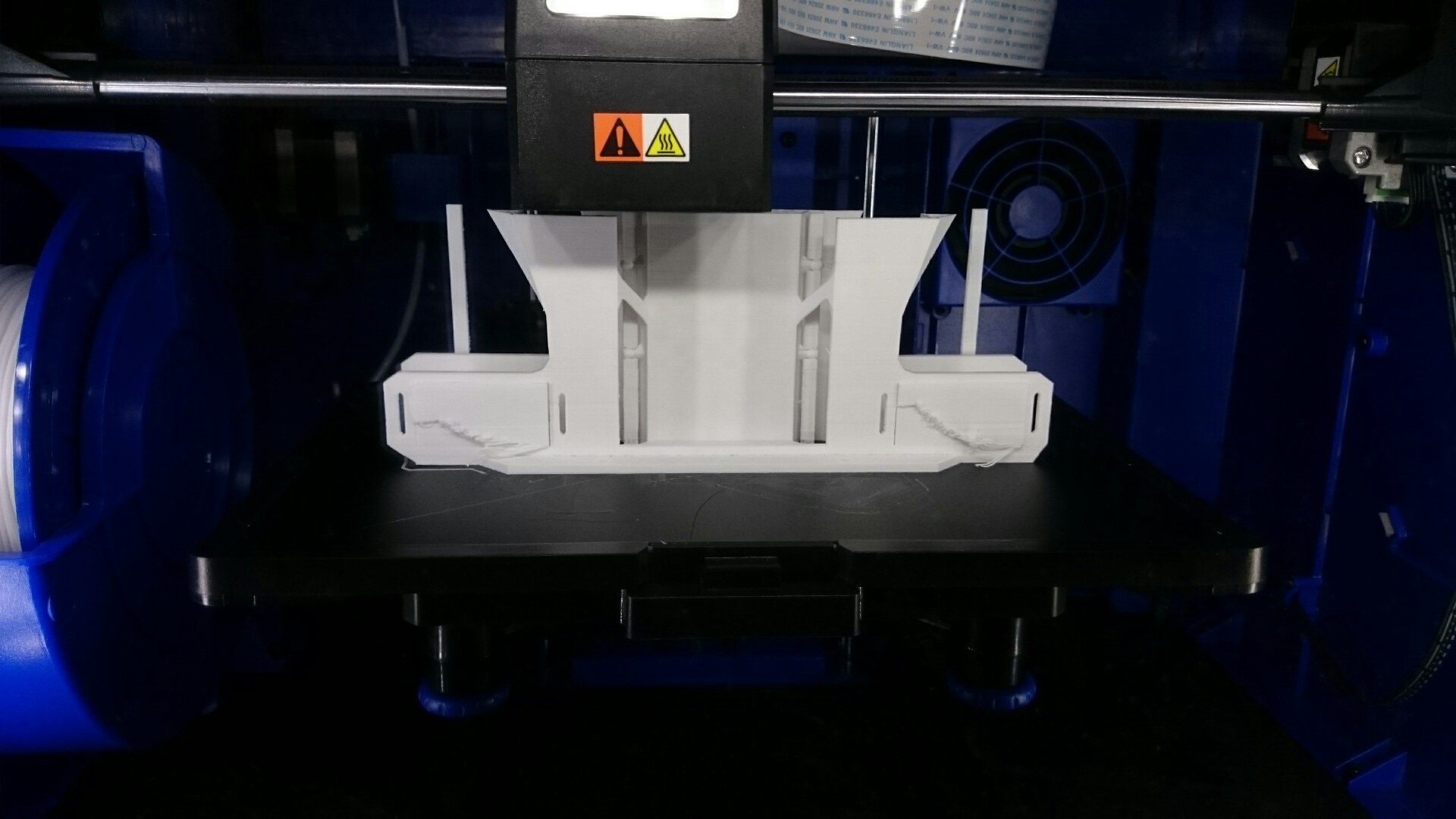
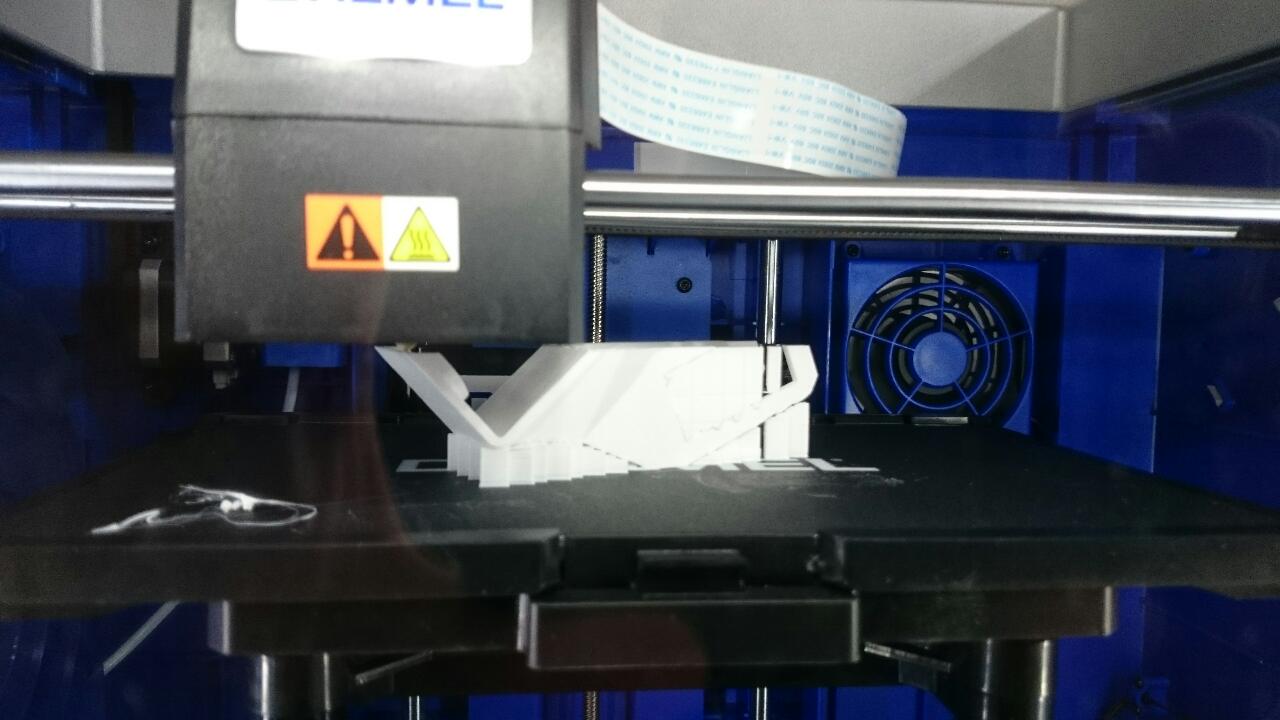
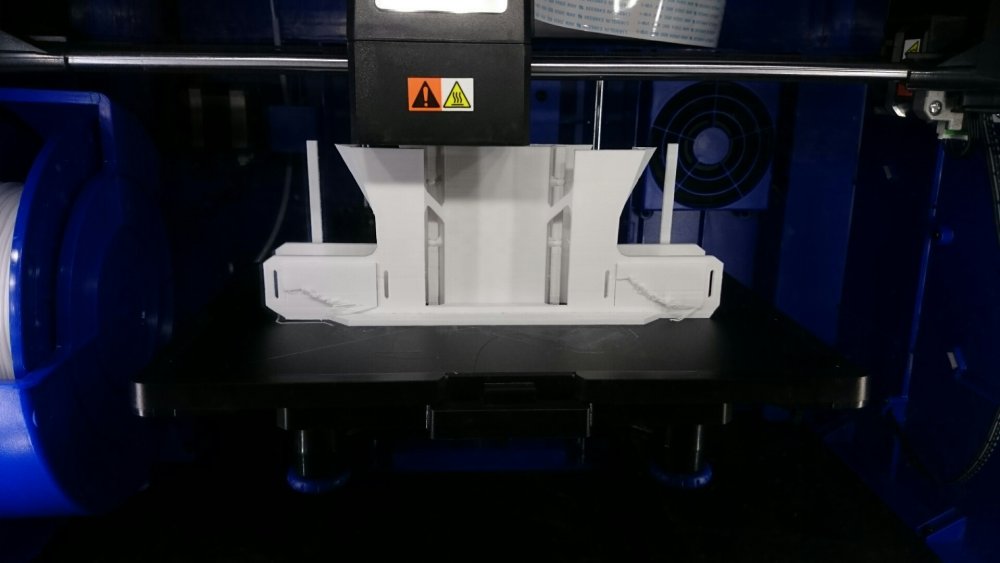
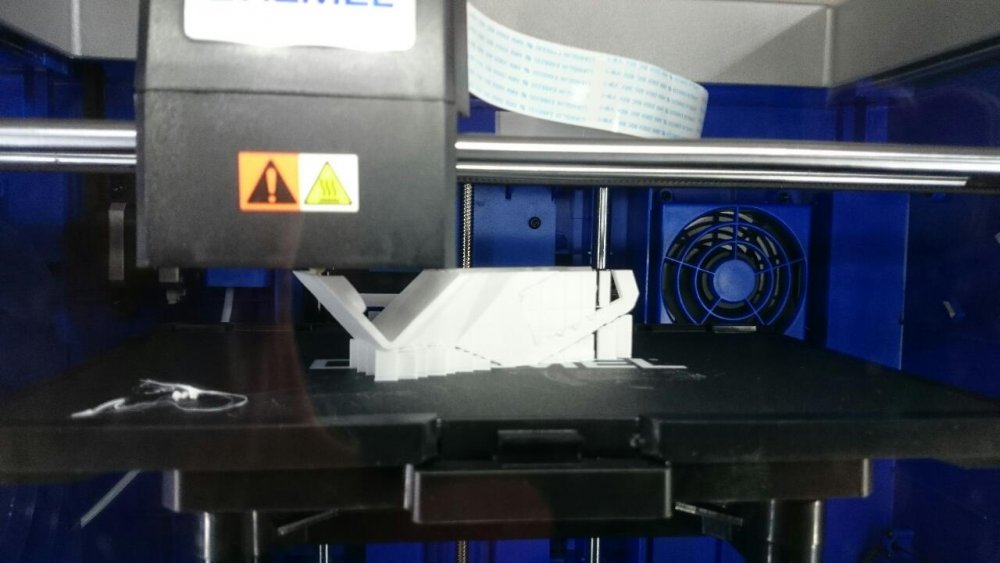
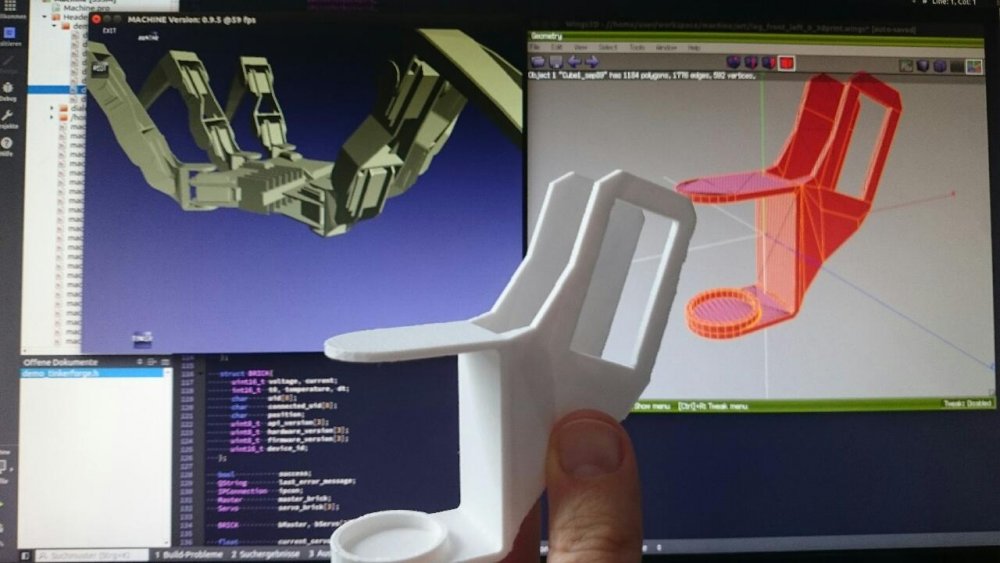
Projektstatus: Die Simulationsumgebung entwickelt sich stetig weiter. Zwecks Auswertung der Sensoren müssen noch einigen Basisfunktionalitäten hinzugefügt werden (Graphen, Messwertanalyse, diverse Schnittstellen...) und die Synchronisierung der Beine ist bisher nur rudimentär umgesetzt. Es fehlt noch ein schlauer Algorithmus und eventuell eine Threading Funktionalität. Das 3D Modell musste ich noch in verschiedensten Details abändern, da die Auslenkungen der Servos zu Überschneidungen der Beine bei Maximalausschlag führten. Zudem sind die Toleranzen noch nicht in Ordnung und um die Stützstrukturen des 3D Druckers zu optimieren sollten 90° Winkel vermieden werden. Ein erstes gedrucktes Teil hier im Bild. Gruß __Alex__
-
Hi Göran, I have not thought about selling this Project. In addition, it is currently a free-time project without a time cap. I would say: Thank you very much for your interest in this; please wait a bit until it makes sense to talk about producing, selling or pricing. And on top maybe it does not fit your requirements? I did not plan to implement useful functions. The AI will just be able to think and not to solve complex problems like washing the dishes, room-cleaning or driving a car. Best Regards, __Alex__
-
Hallo jgmischke, Der Hexapod wird voraussichtlich einen Durchmesser von bestimmt 50cm haben. Die Dimension ergab sich quasi auf Basis der verwendeten Servos und der Bricks. Miniaturisierung wäre natürlich möglich, aber ich habe mich nun mal für diese Bauteile entschlossen. Ich hatte eigentlich nicht darüber nachgedacht, den Roboter zu verkaufen. Vor allem, da der Roboter anschließend nicht ferngesteuert werden kann, oder sonstige nützliche Dinge wie Kaffeekochen oder das Zimmer aufräumen. Er dient lediglich zum Testen der KI und des Reglungssystems. Im Idealfall ist es ein kleiner BB-8 ohne sinnvolle Weltenrettungsfunktion auf 6 Beinen. Wer kauft sowas? Die einzelnen Bauteile kosten mich in Summe um die 700€ (ohne 3D Druckteile). Das Teuerste ist dabei der RedBrick und die Servos. Vielleicht könnte man auch auf ein RaspberryPi umsteigen; mal sehen, was der RedBrick kann. Den Plan und die Druckanleitung kann ich natürlich zur Verfügung stellen. Hab aber alles noch nicht getestet, daher möchte ich noch nichts veröffentlichen. Wird aber alles OpenSource. Versprochen. Gruß __Alex__
-
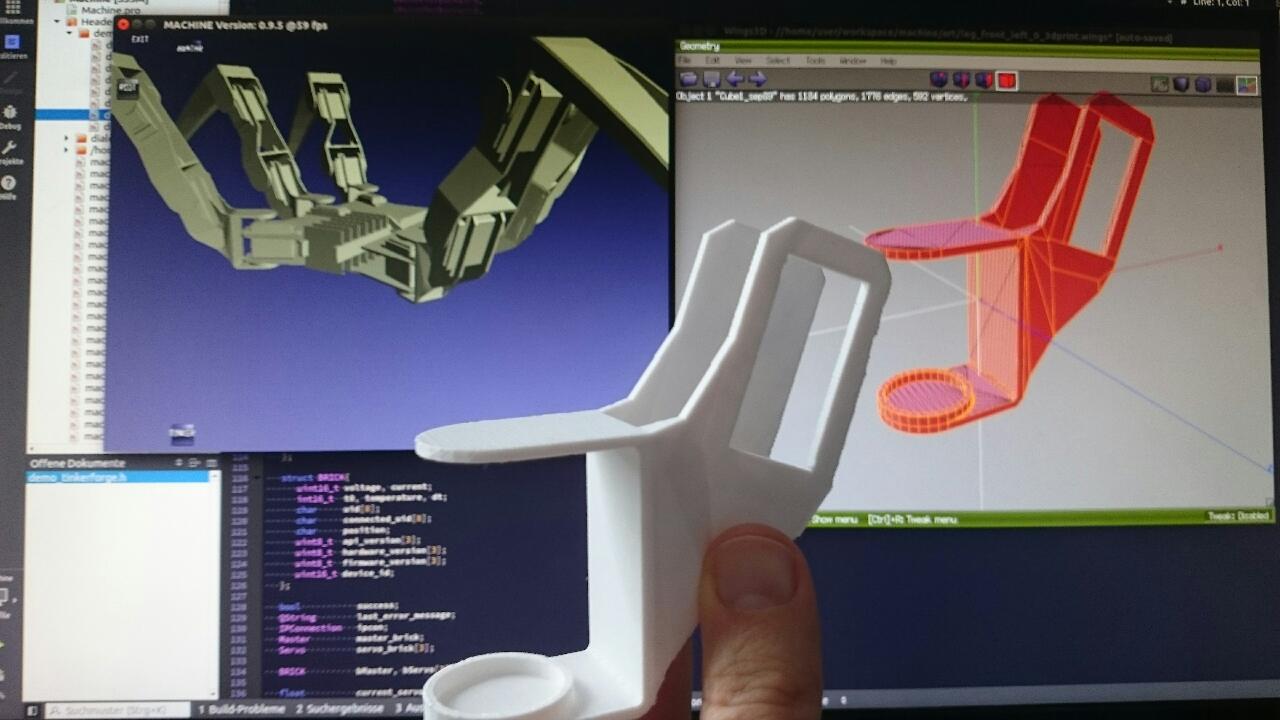
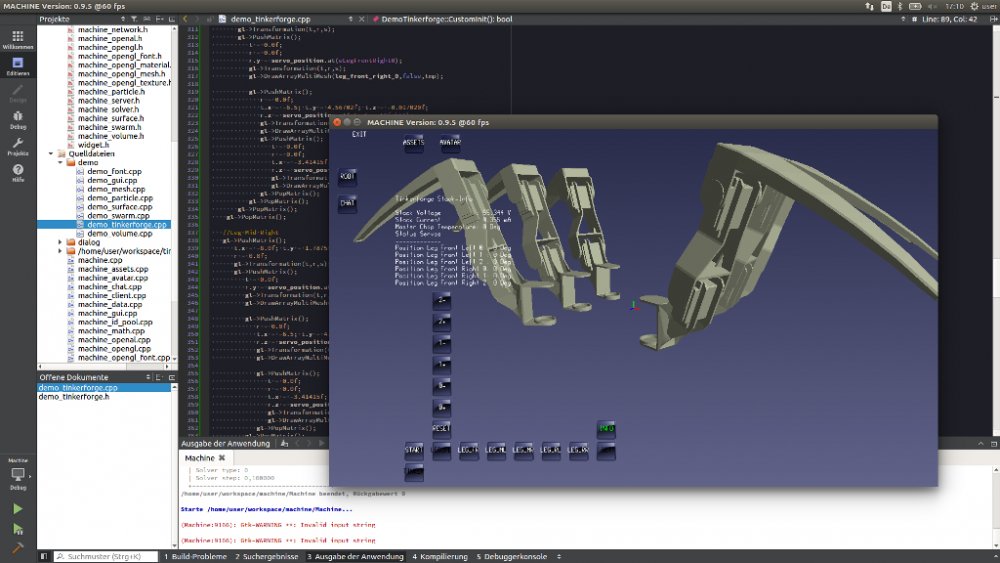
Hallo, hier ein kleiner Zwischenbericht. Habe das 3D Modell in meine Simulationssoftware importiert. Darin werden die Bewegungen, die Servoansteuerung, sonstige Brick-Messwerte und die KI getestet. Zur KI kann ich bei Interesse noch ein paar Details posten; bin aber noch nicht so weit. Ich starte jetzt mit den Grundbewegungsmustern: Bein heben, Bein drehen, Beine im stabilen Zustand zusammen bewegen, etc. Anschließend soll der Roboter selbstständig gehen lernen, sodass ich mir kein Reglungssystem ausdenken muss. Wenn die Limiter (maximale Auslenkungen) optimiert sind, können die 3D Teile gedruckt werden. Das bedarf aber noch ein paar Tests. Gruß __Alex__
-
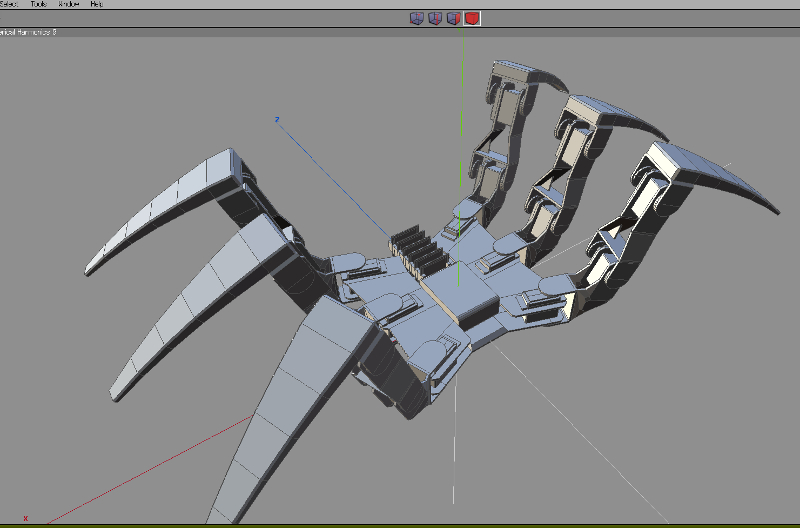
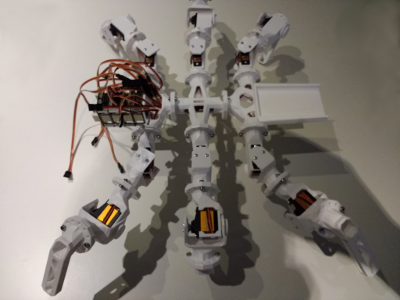
Hallo Tinker Community, hier mein ambitioniertes Projekt: Hexapod Chassis aus dem 3D Drucker (eigener Entwurf) Bricks (zur Zeit): Servobricks, Master, Step Down, Red-Brick Bricklets (in Planung): Ultraschall Abstandmessung, Bewegungsmelder, evtl. GPS, zwecks Kommunikation wahrscheinlich ein OLED Panel und ein Mikro jede Menge Servos (18 Stück) Künstliche Intelligenz zur Bewegungssteuerung und zur Interaktion. Die KI ist hungrig, daher muss die Berechnung wahrscheinlich auf einer Basisstation erfolgen. Ich muss noch ein paar Tests durchführen, ob der RED Brick ausreichende Rechenleistung hat. Ein erstes Bild des Assemblies seht ihr unten. Ein paar Bricks sind ebenfalls zum Testen schon eingetroffen und über Qt funktioniert die Ansteuerung recht reibungslos.