

ufechner
-
Gesamte Inhalte
18 -
Benutzer seit
-
Letzter Besuch
Posts erstellt von ufechner
-
-
Hallo,
Wie benutzen einen ethernet brick ohne PoE, einen master brick und einen servo brick. Spielt es eine Rolle ob der ethernet brick unter oder über dem master brick montiert wird?
Uwe
-
Danke für die schnelle Reaktion! Das Hauptproblem ist, das ein 3D fix gemeldet wird, auch wenn er nicht vorhanden ist.
-
Ja, wir habe die api Beschreibung gelesen.

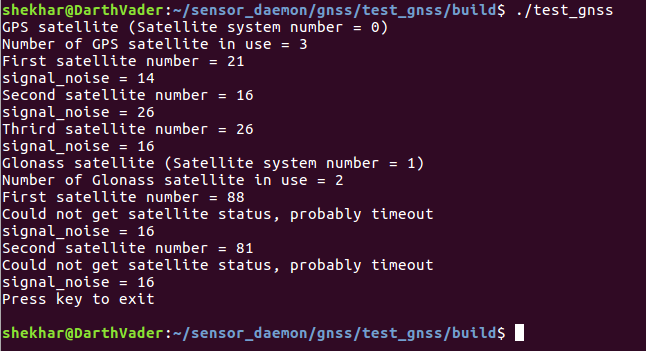
Als Anlage ein Beispielprogramm um den Bug zu demonstrieren und ein Screenshot von der Ausgabe dieses Programms.
Könnt Ihr das Problem reproduzieren?
Uwe
-
Hallo,
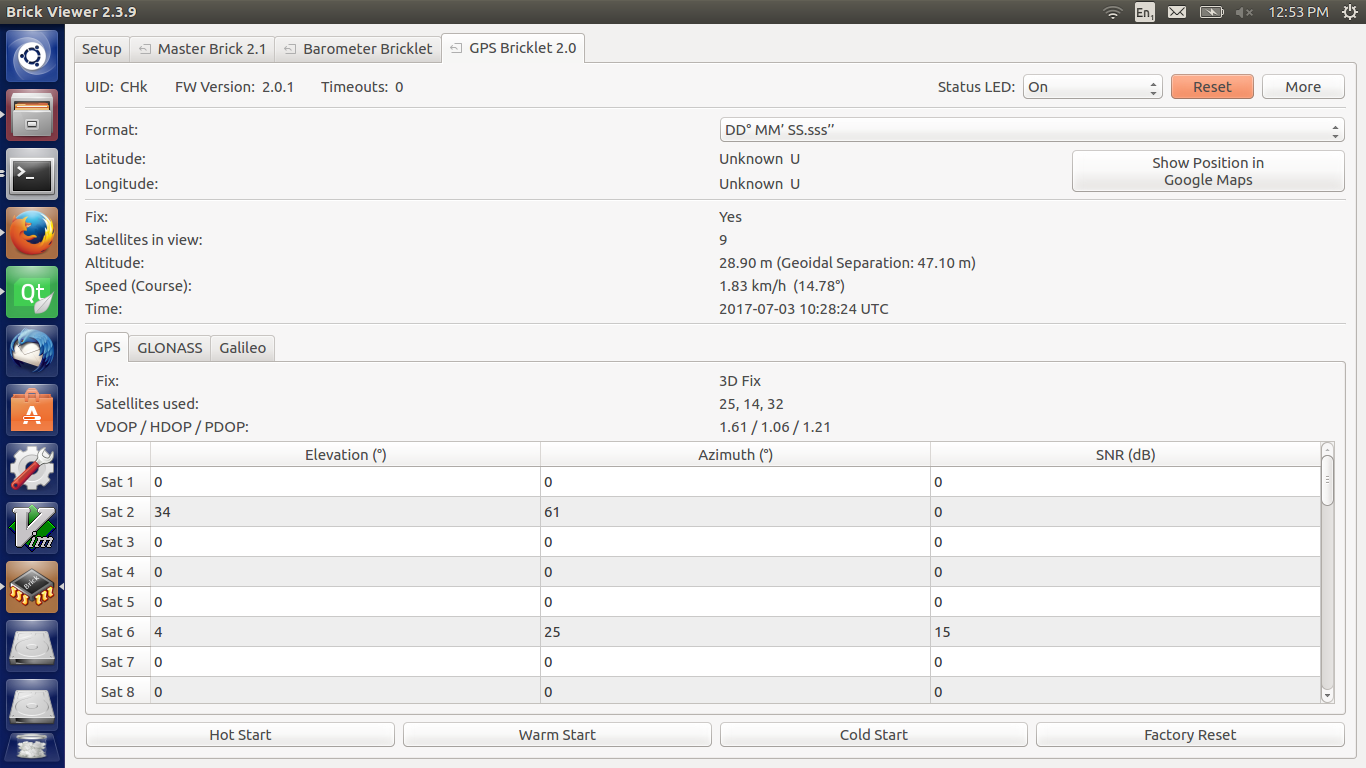
wir sind auf ein anderes Problem gestoßen, das noch schwerwiegender ist: Wenn das Signal schwach wird gibt die API gibt den letzten gemessen Wert zurück, ohne das ein Programm oder der Nutzer die Chance hat zu erkennen, das gar keine Position mehr gemessen wird.
Wenn man den Brickviewer neu startet ergibt sich ein Bild wie in Anlage "brickviewer_bug.png": Es wird angzeigt dass ein 3D fix besteht, aber Latitude und Longitude sind ungültig.
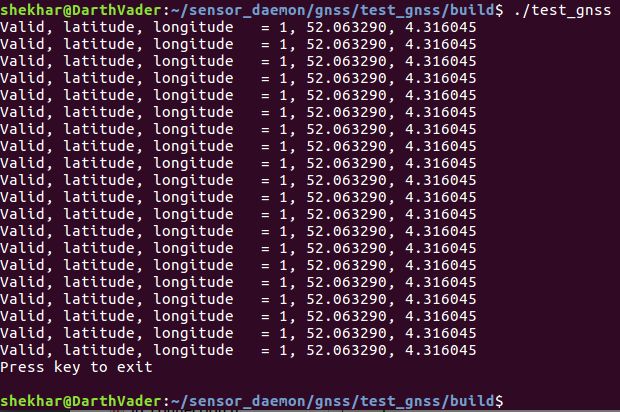
Ein Programm (siehe Anlage main.c) zeigt, das über die API abgerufen Unsinn ausgegeben wird ohne die Möglichkeit zu erkennen, das es sich um Unsinn handelt (siehe Anlage gnss_bug.png).
Bitte, behebt dies Problem!
Wenn kein fix vorhanden wird muss die API das auch zurückmelden.
Vielen Dank!
Uwe
-
Hallo,
die Funktion gps_v2_get_satellite_status funktioniert nicht, wenn man versucht den Status der GLONASS Satelliten abzufragen.
Könnt Ihr diesen Bug reproduzieren?
Uwe
-
Hallo,
ich bin dabei, meine alte Python code Basis komplett auf Julia umzustellen (siehe: https://julialang.org/ )
Julia ist sehr viel schneller und mächtiger als Matlab oder Python, außerdem open source. Es wäre schön, wenn ihr eine Julia API/ Beispiele ergänzen könntet.
Ich kann Euch gerne als Tester helfen.
Uwe
-
Hallo,
ich habe gerade begonnen mich mit Julia (siehe: http://julialang.org/ ) zu beschäftigen. Die Syntax ist ähnlich mit Matlab oder Python, aber die Geschwindigkeit liegt mehr in der Größenordnung von C++.
Also: Sehr einfach zu lernen, elegant und schnell. Ist noch ziemlich neu, aber stark im kommen, vor allen an Universitäten.
Ich würde mich über Julia- Bindings freuen (vorerst kann man natürlich auch die C-Bindings benutzen, aber das ist doch etwas
umständlich).
Uwe Fechner, Delft
-
Hallo,
wir wären sehr an einem Mehrkanal A/D- Wandler interessiert.
Es ist sehr unpraktisch, 8 Module verwenden zu müssen, um 8
Spannungen zu messen, wenn das auch mit einem Modul gehen könnte.
Es gibt gute, kleine A/D- Wandler ICs, z.B. den AD7927 oder AD7928 von Analog Devices. Beide bieten volle 12 bit Auflösung bei 0-5V Eingangsspannung. Der erste kann 200k Messungen pro Sekunde durchführen, der zweite 1M. Ein Software- Tiefpass mit konfigurierbarer Grenzfrequenz im Modul wäre sehr nützlich.
Noch interessanter wäre der IC AD7327, der 13 Bit und per Software wählbare Eingangsspannungsbereiche von ±10 V, ±5 V, ±2.5 V und 0 V to +10 V bietet. Allerdings benötigt der auch mehr Versorgungsspannungen, ich weiss nicht ob sich das auf einem Brick unterbringen lässt.
Gibt es noch andere Nutzer, die an so einem Modul Interesse hätten?
Uwe Fechner, TU Delft, Niederlande
www.kitepower.eu
-
Am 17. März schrieb batti:
Ja, die ersten Ergebnisse sehen gut aus. Zum Glück!Allerdings müssen wir noch ein wenig mehr testen, da es natürlich sehr viele verschiedene Möglichkeiten gibt Dinge zusammenzustecken. Ich bin aber zuversichtlich, dass die alle klappen werden.
Gibt es neue Testergebnisse?
Wir wollen einen Modulstack an unseren Lenkdrachen testen, und eine Ethernet Extension würde erhebliches Gewicht sparen im Vergleich zum zweiten Electrum100, den wir momentan einsetzen.
Uwe
-
Der zweite Prototyp ist bestellt und trifft nächste Woche bei uns ein.
Liegen schon irgendwelche Testergebnisse vom zweiten Prototyp vor?
Uwe
-
Vielen Dank für die schnelle Unterstützung.
Alles funktioniert nun wunderbar!
Uwe
-
Diese Seite hier könnte auch helfen: Hier ist erklärt, wie brickd auf dem Raspberry Pi (auch armel) installiert wird:
http://www.tinkerforge.com/de/doc/Embedded/Raspberry_Pi.html
Nun, der Raspberry Pi benutzt NICHT die armel Architektur, sondern die armhf Architektur. Merke: Mit FPU: armhf, ohne FPU: armel.
-
To compile brickd (tinkerforge) for the Electrum 100
computer on debian 6.x, I needed the following commands:
> cd ~
> mkdir 00Software
> cd 00Software
> sudo apt-get install git
> git clone git://github.com/Tinkerforge/brickd.git
> cd brickd/src/brickd
> sudo apt-get install libusb-dev
> sudo apt-get install pkg-config
> sudo apt-get install libusb-1.0
> sudo apt-get install libudev-dev
> make
But what next?
I can start it with:
./brickd
And stop it with <ctrl><c> .
But I would like to have a start-stop script so that I can start it with:
> sudo service brick start
and stop it with
> sudo service brick stop.
Did anyone write such a script already?
Uwe Fechner
-
Hallo,
ich versuche den brickd auf einem Electrum100 zu installieren (siehe: http://wiki.micromint.com/index.php/Electrum_Documentation ).
Das board hat einen ARM Processor von Atmel mit 400 MHz, aber ohne FPU.
uname -a
Linux icarus 2.6.33.5-at91 #1 PREEMPT Sun Jan 1 23:03:26 CET 2012 armv5tejl GNU/Linux
Fehlermeldung:
dpkg: Fehler beim Bearbeiten von brickd_linux_latest_armhf.deb (--install):
Paket-Architektur (armhf) passt nicht zum System (armel)
Fehler traten auf beim Bearbeiten von:
brickd_linux_latest_armhf.deb
Wie kann ich den brickd auf dieser Maschine (debian 6) zum laufen bekommen?
Mit besten Grüßen:
Uwe Fechner
-
Das klingt ja erstmal vielversprechend. Unser Linux-Kernel hat eine maximale Latency of 200 µs, und wir achten darauf, das die Systemlast unter 50% liegt, so das die Verzögerung durch das Hauptprogramm gering bleiben sollte.
Frage:
Arbeitet die PWM Puls- Erzeugung synchron oder asynchron?
Bei 50 Hz Pulsfrequenz und einem freilaufenden Puls-Generator würde sich schon allein aufgrund der Betriebsart eine worst-case Verzögerung von 20 ms ergeben (genau dann wenn gerade ein Impuls gesendet wurde und in dem Moment ein neuer Steuerbefehl eintrifft).
Wir benötigen eine Implementierung bei der spätestens 7 ms nach dem Eintreffen eines neuen Steuerbefehls ein neuer Impuls abgegeben wird, ggf. unter Beachtung einer Mindestzeit zwischen zwei Impulsen.
Wir haben eine mittlere update Frequenz der Steuerbefehle von 40 Hz und können eine Zeitspanne von 20 bis 30 ms zwischen zwei Steuerbefehlen garantieren.
Mfg:
Uwe
-
Hallo,
wir arbeiten an einer Flugdrachen-Steuerung (siehe www.kitepower.eu) und benötigen dafür drei Servo Ausgänge. Als Steuer- Computer verwenden wir einen Electrum 100 (400 Mhz ARM Linux) Rechner, auf dem ein QT/C++ basierter Autopilot ausgeführt wird. Leider haben wir keine drei PWM Ausgänge mehr zur Verfügung und überlegen, ob wir einen Servo-Brick via USB anschließen könnten.
Wichtigste Anforderung:
Die Verzögerungszeit zwischen dem Absetzen eines Steuerbefehls vom C++ Programm im Steuercomputer und dem Ende des PWM Pulses (mit der neuen Pulslänge) darf nicht größer als 10 ms sein. Andernfalls kann die "control loop" instabil werden.
Wie groß ist diese Verzögerung (worst case) bei der momentanen Implementierung?
Mit besten Grüßen:
Uwe Fechner
PhD researcher Kite Control
TU Delft, Niederlande
-
We would also be very interested in an ethernet brick for
our kitepower research.
Uwe Fechner, www.kitepower.eu, TU Delft, The Netherlands



Feature request: Unterstützung für die Sprache "Julia"
in Software, Programmierung und externe Tools
Geschrieben · bearbeitet von ufechner
Hallo,
Mittlerweile hat Julia viel Reife und Popularitaet gewonnen. Es ist jetzt auf Platz 28 der Tiobe Liste (https://www.tiobe.com/tiobe-index/), vor Delphi/Pascal.
Julia ist die Nummer Eins Alternative zu Matlab im Bereich der wissenschaftlichen Softwareentwicklung. (Fast) so einfach wie Python, so schnell wie C. Und es laeuft gut auf einem Rasberry Pi 4.
Wie ist die Chance for Julia bindings in 2020?
Dr. Uwe Fechner, Den Haag