signal
Members
-
Benutzer seit
-
Letzter Besuch
-
Hallo zusammen, gibts eine Möglichkeit über die http://www.tinkerforge.com/de/doc/Software/Bricks/RED_Brick_PHP.html RED Brick API den AccessPoint Modus zu aktivieren? Konkret würde ich gerne einen Knopf zum konfigurieren des Device integrieren: Knopf drücken -> AccessPoint aktivieren -> Login per WLAN -> Device konfigurieren Merci und Grüsse, Rainer
-
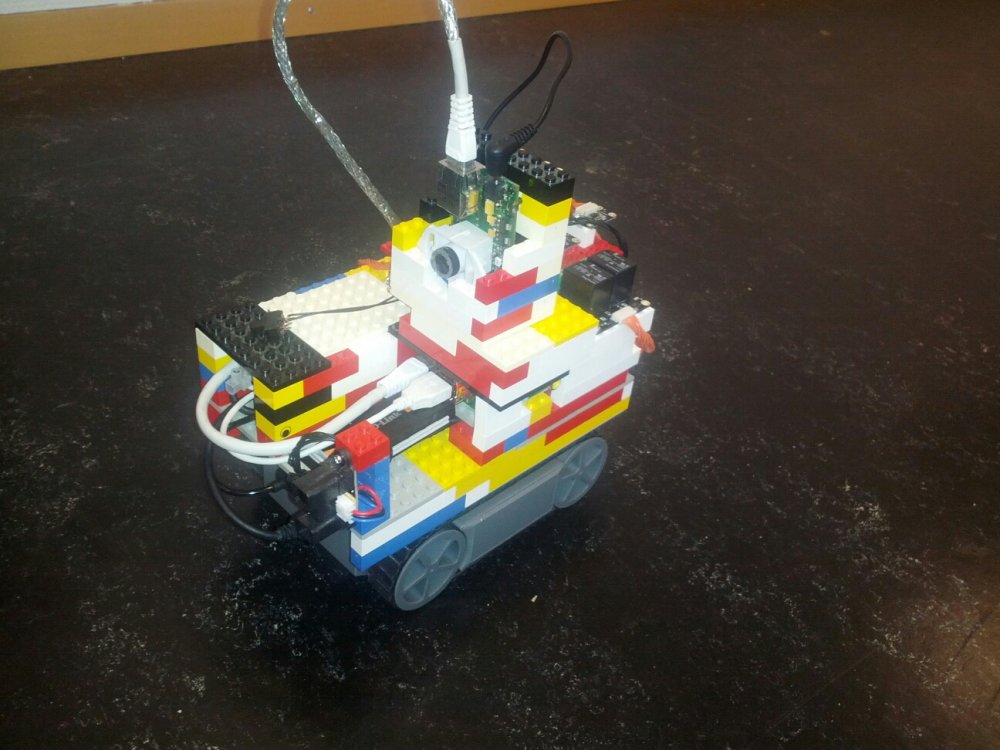
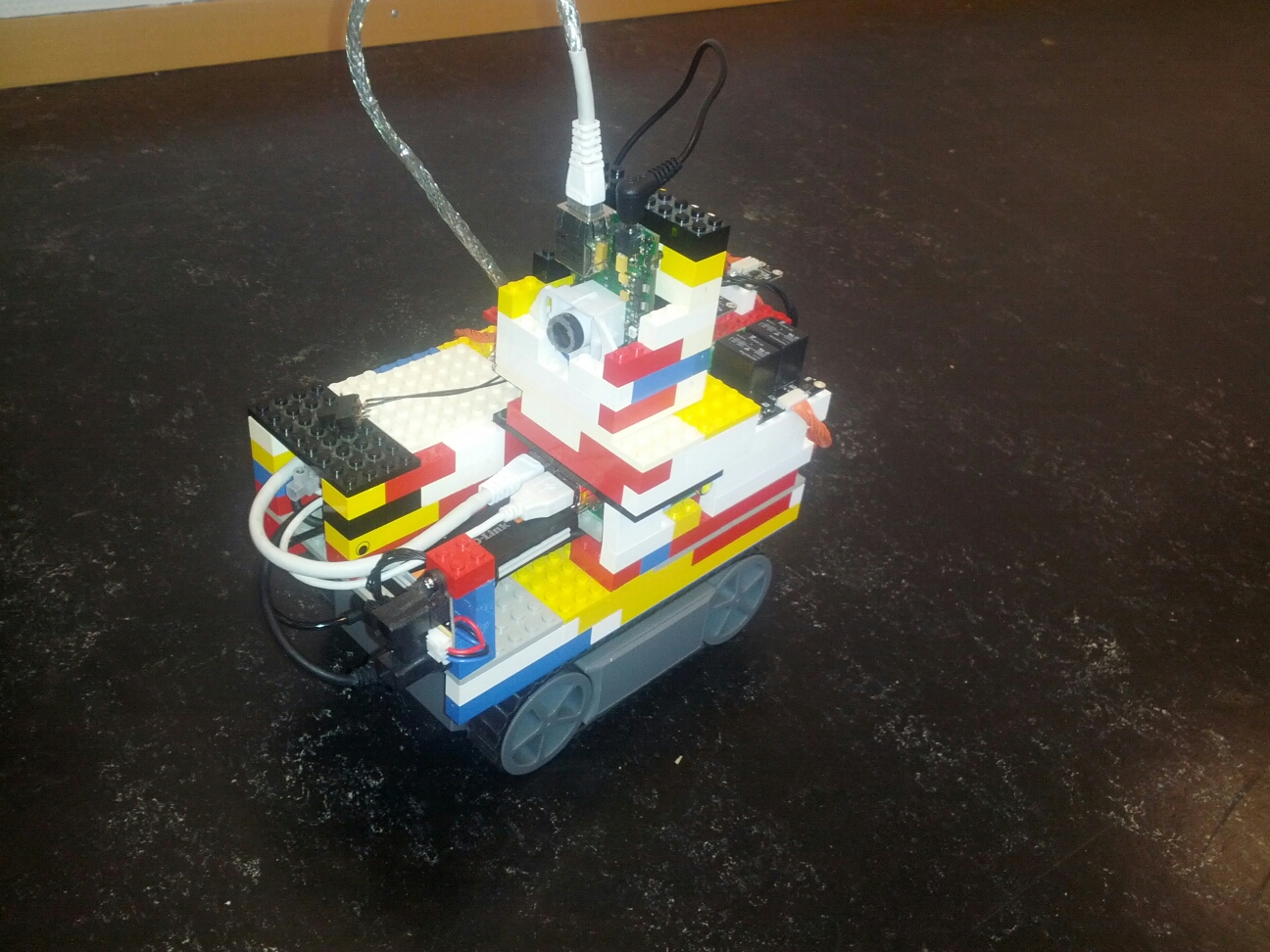
Fahrgestell: C-Control Robot System Fahrgestell Robby RP5/RP6 Roboter Kostet bei Conrad ca. 50eur. Ziemlich praktisch zum "basteln" :-) Habe zwei DC Bricks, eine Master Unit und DC-Supply von TF dran. Dazu noch einige Bricklets Das ganze hängt an einem Raspberry Pi, die Kamera ist eine Axis Netzwerkkamera welche am EthernetPort vom Pi hängt. Dieser hat somit auch einen Proxs installiert dafür. An einer Powerbank von XTORM mit 7000mAh hängen Pi und Kamera. An die PowerSupply habe ich einen Akku mit ca. 14000mAh angeschlossen. Kann dir aber jetzt so nicht sagen wielange das ganze hält bei "durchfahrt". Pi und Kamera laufen ca. 4 Stunden damit. Gruss, signal
-
Mir gefallen eigentlich beide Lösungsvorschläge (Induktion/Schleifkontakt). Ich nutze momentan noch eine Xtorm Power Bank zur Stromversorgung. Leider weis ich nicht wie sowas auf gleichzeitiges laden und entladen (TF und Raspberry Pi sollten ja weiterlaufen) reagieren. Irgendwelche erfahrungen?
-
Lego ist genial. Da baut man in 5 minuten sein gesamtes gehäuse um. Mach das mal mit Holz Hab leider das gefühl, mit einer Kamera kommt man da nicht soweit. Die Auflösung/Qualität ist warscheinlich auch zu schlecht (von meiner jedenfalls). Es wär ja schon toll, wenn ich das "Ding" von Hand in eine Station fahren könnte, und sich die Akkus Aufladen. Dazu bräuchte ich eine art Netzladeteil das ich verbauen könnte. Habe aber irgendwie nichts gefunden. Gibts da Ideen? Habe vorhin noch die Steuerung mit dem Neigesensor von Tablets/Handys integriert.
-
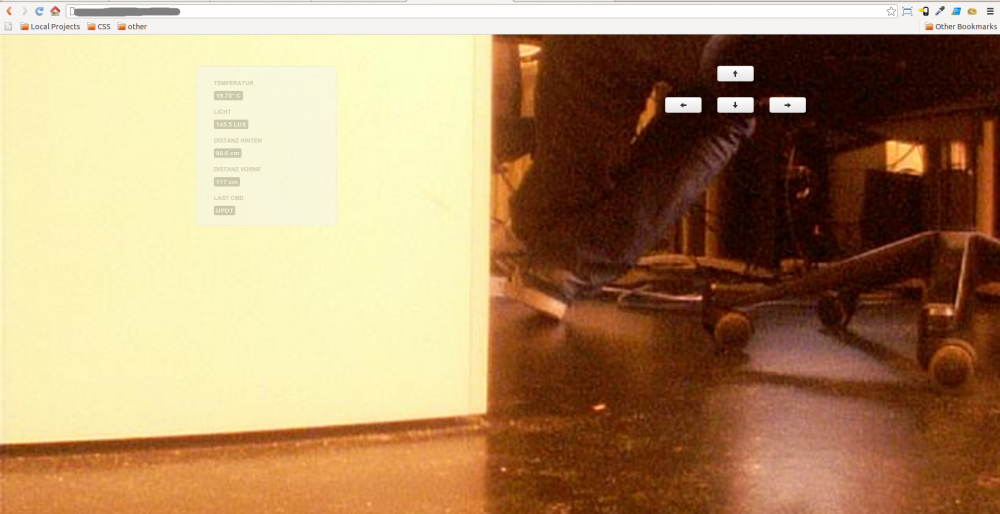
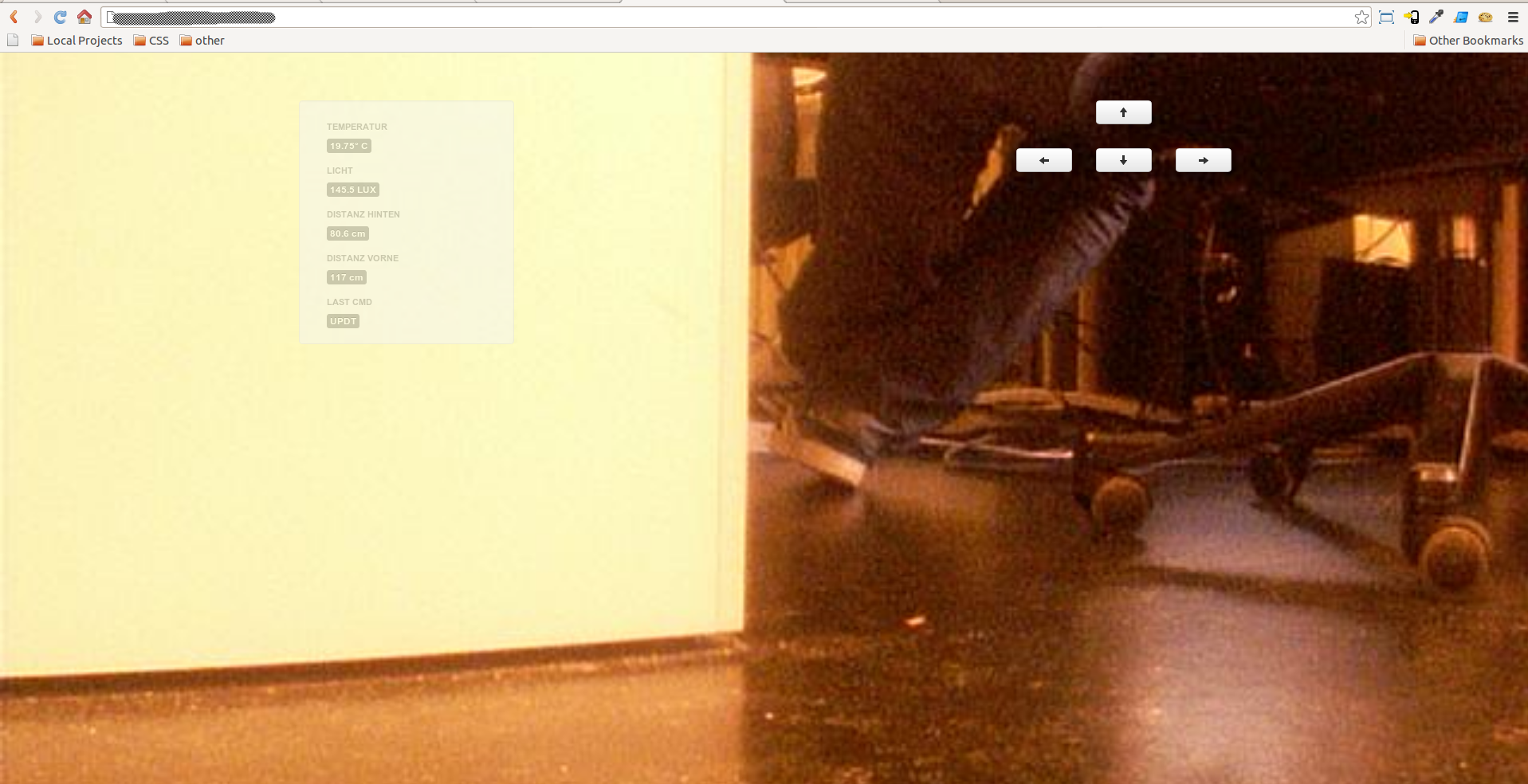
Hallo! Hab mir mal als kleines Tinkerforge Erstprojekt einen Roboter zusammengebaut den man über ein Webinterface fernsteuern kann. In Kombination mit einem Raspberry Pi hat dies ziemlich gut funktioniert. Steuerbar ist das ganze über die Pfeiltasten des Browsers. Momentan läuft das gnaze mit zwei Akkus, ich will aber unbedingt noch eine "Ladestation" einbauen die man ansteuern kann. Habe nur noch keine Ahnung wie ich das bewerkstelligen soll. Irgendwelche Ideen?