




MRonline
Members
-
Benutzer seit
-
Letzter Besuch
-
Das würde mich auch sehr interessieren! Das wäre mega cool!
-
wie schaltet man das Display denn aus? $oled->clearDisplay(); löscht sicherlich nur den Inhalt?
-
ok. schade. Danke Dir!
-
Hi, ich versuche gerade die Textgröße zu erhöhen, finde aber nichts. Ich würde gern eine Zahl (Temperatur) so groß darstellen, dass man sie aus 2m Distanz lesen kann. Vergleichbar mit der Textgröße im Video in der Doku: https://www.tinkerforge.com/de/doc/Hardware/Bricklets/OLED_128x64_V2.html#oled-128x64-v2-bricklet Wie bekomme ich das mit PHP hin? Dankesehr!
-
Gern! Ich melde mich, wenn mein Aufbau optimiert ist und wie gewünscht läuft. Zur Zeit ist es ja noch Bastel-Status
-
Vielen Dank!!! Es funktioniert Nun muss ich nur noch ein paar Anpassungen der Werte vornehmen, um die Helligkeitsunterschiede der verschiedenen Farben auszugleichen und dann kann sich das sehen lassen Danke!
-
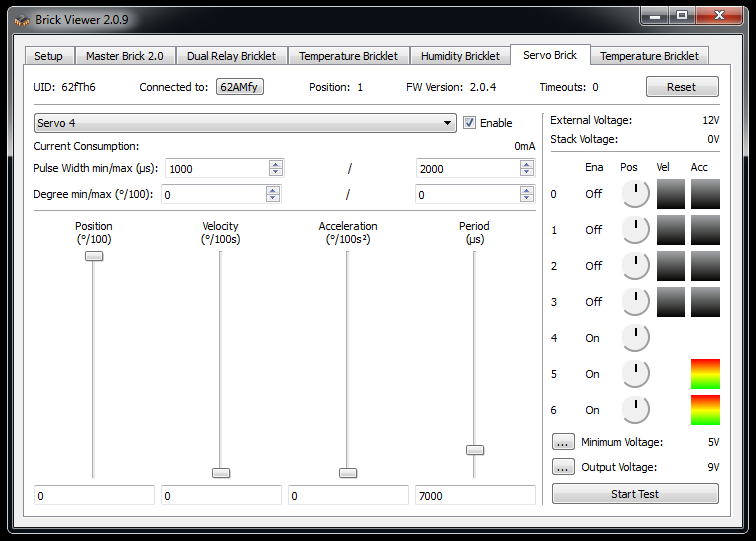
Hallo, ich hab das Gefühl, wir kommen der Lösung näher. Danke schon mal Ich habe den Code eingefügt, ohne Ergbnis. Angeschlossen ist der Stapel (Master mit Servo drauf) wiefolgt: - Per USB am Raspberry Pi Der BrickV läuft auf einem Win7 PC, der im gleichen LAN läuft. Das PHP Script habe ich sowohl auf jedem Win-PC als auch auf dem Raspberry direkt getestet. Die Firmware der Bricks und Bricklets ist auch die aktuelle. Hier nochmal eine etwas besser formatierte Ausgabe (alles Getter()), nach dem setzen der Werte: Array ( [temperature] => 454 [overAllCurr] => 0 [outputV] => 9000 [stackInV] => 0 [externInV] => 12073 ) ROT Array ( [Acceleration] => 0 [Velocity] => 0 [Period] => 1 [PulsWidth] => Array ( [min] => 1000 [max] => 2000 ) [Degree] => Array ( [min] => 0 [max] => 0 ) [Position] => 0 [Enabled] => 1 ) GRÜN Array ( [Acceleration] => 0 [Velocity] => 0 [Period] => 1 [PulsWidth] => Array ( [min] => 1000 [max] => 2000 ) [Degree] => Array ( [min] => 0 [max] => 0 ) [Position] => 0 [Enabled] => 1 ) BLAU Array ( [Acceleration] => 0 [Velocity] => 0 [Period] => 1 [PulsWidth] => Array ( [min] => 1000 [max] => 2000 ) [Degree] => Array ( [min] => 0 [max] => 0 ) [Position] => 0 [Enabled] => 1 ) d.h. es wird überall die Periode 1 zurück gegeben. der LED Streifen leuchtet aber weiß, d.h. die Periode müsste min >100 sein, pro Servo. Wenn ich im BrickV 1 einstelle, leuchten die LEDs nicht, was ja auch gut so ist Ich versteh es nicht hier nochmal die komplette Klasse, falls es hilft: <?php require_once PATH_INC."main.inc.php"; /** * @author MR */ class Led_Inc extends Main_Inc { private $common; /** * @var IPConnection */ private $tinker_conn; /** * @var BrickServo */ private $tinker_serv; private $color_new; static private $s_red = array( 'id' => 4, 'min_p' => 1, 'max_p' => 500 ); static private $s_green = array( 'id' => 5, 'min_p' => 1, 'max_p' => 8400 ); static private $s_blue = array( 'id' => 6, 'min_p' => 1, 'max_p' => 5000 ); public function __construct(){ parent::__construct(); Main_Class::include_db('common','common.db'); $this->common = new Common_DB(); $this->DATA =& parent::$DATA['led']; $this->DATA['error'] = ''; $this->DATA['state'] = 0; Main_Class::include_utils('Tinkerforge/IPConnection'); Main_Class::include_utils('Tinkerforge/BrickServo'); try { $this->tinker_conn = new Tinkerforge\IPConnection(); $this->tinker_serv = new Tinkerforge\BrickServo( tfUID_SERVO, $this->tinker_conn ); $this->tinker_serv->setResponseExpectedAll(True); $this->tinker_conn->connect( tfHOST, tfPORT ); $this->set_color(); $this->set_data(); $this->get_data(); $this->tinker_conn->disconnect(); Main_Class::include_design('led','led.design'); } catch (Exception $exc) { echo $exc->getTraceAsString(); } } public function __destruct() { if( $this->tinker_conn->getConnectionState() ) $this->tinker_conn->disconnect(); } protected function set_color(){ if( $_REQUEST['rgb'] && substr($_REQUEST['rgb'], 0, 3)=='rgb' ){ $rgb_str = substr($_REQUEST['rgb'], 4); $rgb_str = substr($rgb_str, 0, strlen($rgb_str)-1); $arrRGB = explode(',', $rgb_str); if( isset($arrRGB[0]) && isset($arrRGB[1]) && isset($arrRGB[2])){ $this->color_new['red'] = $arrRGB[0]; $this->color_new['green'] = $arrRGB[1]; $this->color_new['blue'] = $arrRGB[2]; $this->DATA['newRGB'] = $this->color_new; } } } protected function set_data(){ // Configure two servos with voltage 5.5V // Servo 1: Connected to port 0, period of 19.5ms, pulse width of 1 to 2ms // and operating angle -100 to 100° // // Servo 2: Connected to port 5, period of 20ms, pulse width of 0.95 // to 1.95ms and operating angle -90 to 90° $this->tinker_serv->setOutputVoltage(9000); // blue $this->tinker_serv->setDegree($this->s_blue['id'], 0, 0); $this->tinker_serv->setVelocity($this->s_blue['id'], 0); // Full speed $this->tinker_serv->setAcceleration($this->s_blue['id'], 0); // Slow acceleration $this->tinker_serv->setPulseWidth($this->s_blue['id'], 1000, 2000); $this->tinker_serv->setPeriod($this->s_blue['id'], 1); // red $this->tinker_serv->setDegree($this->s_red['id'], 0, 0); $this->tinker_serv->setVelocity($this->s_red['id'], 0); // Full speed $this->tinker_serv->setAcceleration($this->s_red['id'], 0); // Slow acceleration $this->tinker_serv->setPulseWidth($this->s_red['id'], 1000, 2000); $this->tinker_serv->setPeriod($this->s_red['id'], 7000); // green $this->tinker_serv->setDegree($this->s_green['id'], 0, 0); $this->tinker_serv->setVelocity($this->s_green['id'], 0); // Full speed $this->tinker_serv->setAcceleration($this->s_green['id'], 0); // Slow acceleration $this->tinker_serv->setPulseWidth($this->s_green['id'], 1000, 2000); $this->tinker_serv->setPeriod($this->s_green['id'], 1); // setPostion and enable $this->tinker_serv->setPosition($this->s_blue['id'], 0); // Set to most right position $this->tinker_serv->enable($this->s_blue['id']); $this->tinker_serv->setPosition($this->s_red['id'], 0); // Set to most right position $this->tinker_serv->enable($this->s_red['id']); $this->tinker_serv->setPosition($this->s_green['id'], 0); $this->tinker_serv->enable($this->s_green['id']); } protected function get_data(){ $arrSred['temperature'] = $this->tinker_serv->getChipTemperature(); $arrSred['overAllCurr'] = $this->tinker_serv->getOverallCurrent(); $arrSred['outputV'] = $this->tinker_serv->getOutputVoltage(); $arrSred['stackInV'] = $this->tinker_serv->getStackInputVoltage(); $arrSred['externInV'] = $this->tinker_serv->getExternalInputVoltage(); $this->DATA['general'] = $arrSred; unset($arrSred); #echo 'RED'; $arrSred['Acceleration'] = $this->tinker_serv->getAcceleration($this->s_red['id']); $arrSred['Velocity'] = $this->tinker_serv->getVelocity($this->s_red['id']); $arrSred['Period'] = $this->tinker_serv->getPeriod($this->s_red['id']); $arrSred['PulsWidth'] = $this->tinker_serv->getPulseWidth($this->s_red['id']); $arrSred['Degree'] = $this->tinker_serv->getDegree($this->s_red['id']); $arrSred['Position'] = $this->tinker_serv->getPosition($this->s_red['id']); $arrSred['Enabled'] = $this->tinker_serv->isEnabled($this->s_red['id']); $this->DATA['red'] = $arrSred; unset($arrSred); #echo 'BLUE'; $arrSred['Acceleration'] = $this->tinker_serv->getAcceleration($this->s_blue['id']); $arrSred['Velocity'] = $this->tinker_serv->getVelocity($this->s_blue['id']); $arrSred['Period'] = $this->tinker_serv->getPeriod($this->s_blue['id']); $arrSred['PulsWidth'] = $this->tinker_serv->getPulseWidth($this->s_blue['id']); $arrSred['Degree'] = $this->tinker_serv->getDegree($this->s_blue['id']); $arrSred['Position'] = $this->tinker_serv->getPosition($this->s_blue['id']); $arrSred['Enabled'] = $this->tinker_serv->isEnabled($this->s_blue['id']); $this->DATA['blue'] = $arrSred; unset($arrSred); #echo 'GREEN'; $arrSred['Acceleration'] = $this->tinker_serv->getAcceleration($this->s_green['id']); $arrSred['Velocity'] = $this->tinker_serv->getVelocity($this->s_green['id']); $arrSred['Period'] = $this->tinker_serv->getPeriod($this->s_green['id']); $arrSred['PulsWidth'] = $this->tinker_serv->getPulseWidth($this->s_green['id']); $arrSred['Degree'] = $this->tinker_serv->getDegree($this->s_green['id']); $arrSred['Position'] = $this->tinker_serv->getPosition($this->s_green['id']); $arrSred['Enabled'] = $this->tinker_serv->isEnabled($this->s_green['id']); $this->DATA['green'] = $arrSred; } } new Led_Inc(); ?> die set_color() hat zZ keine Auswirkung!
-
gern. Im Anhang der, der "Rot" ansteuert. Grün und Blau genauso, nur Periode auf 1, sodass nur rot leuchtet. Grüße
-
Ich glaub ich hab mich zu ungenau ausgedrückt. Die Werte sind exakt so, wie im BrickV. Die Verbindung steht auch, denn ich kann alle Daten des Servos auslesen. Diese (alle Rückgaben der Getter der ServoKlasse) habe ich in Arrays geworfen und ausgegeben (siehe Ende des 1. Posts). Es scheint aber, als würde der Servo die Daten nicht übernehmen, da keine Änderung sichtbar ist. Beim anpassen der Werte im BrickV werden die Werte manchmal auch nicht übernommen, dann muss ich den Servo deaktivieren und wieder aktivieren. Das ist aber relativ selten der Fall. Ich kann auch gern die komplette Klasse posten, aber der betreffende Code ist oben zu sehen.
-
Hallo, ich bin gerade dabei mit dem Servo-PWM-Signal einen RGB-LED-Strip (keinen digitalen) anzusteuern. Mit dem BrickV klappt das schon ganz gut. Mit PHP will es nicht. Hier mein Code: $this->serv_red = 4; $this->serv_green = 5; $this->serv_blue = 6; $this->tinker_conn = new Tinkerforge\IPConnection(); $this->tinker_serv = new Tinkerforge\BrickServo( tfUID_SERVO, $this->tinker_conn ); $this->tinker_conn->connect( tfHOST, tfPORT ); $this->tinker_serv->setOutputVoltage(9000); // blue $this->tinker_serv->setDegree($this->serv_blue, 0, 0); $this->tinker_serv->setPulseWidth($this->serv_blue, 1000, 2000); $this->tinker_serv->setPeriod($this->serv_blue, 1); $this->tinker_serv->setAcceleration($this->serv_blue, 0); // Slow acceleration $this->tinker_serv->setVelocity($this->serv_blue, 0); // Full speed // red $this->tinker_serv->setDegree($this->serv_red, 0, 0); $this->tinker_serv->setPulseWidth($this->serv_red, 1000, 2000); $this->tinker_serv->setPeriod($this->serv_red, 7000); $this->tinker_serv->setAcceleration($this->serv_red, 0); // Slow acceleration $this->tinker_serv->setVelocity($this->serv_red, 0); // Full speed // green $this->tinker_serv->setDegree($this->serv_green, 0, 0); $this->tinker_serv->setPulseWidth($this->serv_green, 1000, 2000); $this->tinker_serv->setPeriod($this->serv_green, 1); $this->tinker_serv->setAcceleration($this->serv_green, 0); // Slow acceleration $this->tinker_serv->setVelocity($this->serv_green, 0); // Full speed $this->tinker_serv->setPosition($this->serv_blue, 0); // Set to most right position $this->tinker_serv->enable($this->serv_blue); $this->tinker_serv->setPosition($this->serv_red, 0); // Set to most right position $this->tinker_serv->enable($this->serv_red); $this->tinker_serv->setPosition($this->serv_green, 0); $this->tinker_serv->enable($this->serv_green); $this->tinker_conn->disconnect(); Das ganze innerhalb einer Klasse. Was sollte passieren? Rot sollte leuchten. Was passiert? Nichts. Bzw keine Änderung. Alle 3 Farben leuchten. Entweder ich habe die API oder den Servo nicht richtig verstanden. Ich denke, dass ich Geschwindigkeit, Beschleunigung und Winkel nicht brauche, da ich ja keinen Motor habe. Also stelle ich nur eine Periode ein um die Helligkeit festzulegen. Richtig? Hier nochmal die Stati nach dem Aufruf Array ( [temp] => 436 [overAllCurr] => 0 [outV] => 9000 [stackInV] => 0 [extV] => 12029 ) RED Array ( [acc] => 0 [vel] => 0 [per] => 1 [puls] => Array ( [min] => 1000 [max] => 2000 ) [degr] => Array ( [min] => 0 [max] => 0 ) [pos] => 0 [on] => 1 ) BLUE Array ( [acc] => 0 [vel] => 0 [per] => 1 [puls] => Array ( [min] => 1000 [max] => 2000 ) [degr] => Array ( [min] => 0 [max] => 0 ) [pos] => 0 [on] => 1 ) GREEN Array ( [acc] => 0 [vel] => 0 [per] => 1 [puls] => Array ( [min] => 1000 [max] => 2000 ) [degr] => Array ( [min] => 0 [max] => 0 ) [pos] => 0 [on] => 1 ) Vielen Dank schon mal für Eure Hilfe! MRonline
-
Hallo, ich würde an dieser Stelle gern nochmal nach genaueren Informationen fragen, um zukünftige Projekte etwas planen zu können. 1. Habt ihr ein ungefähres Erscheinungsdatum? Wenigstens den Monat? 2. Das Bricklet scheint ausschließlich für digital RGB Strips gedacht zu sein. Ich würde gern meine analogen RGB Strips damit steuern. Ist das möglich indem man etwas zischen schaltet, dass das digitale Signal umwandelt und genug Strom ausgibt? Vielleicht sowas hier http://shop.led-studien.de/product_info.php/info/p111_DMX512-Decoder--4x-3A-Ausgang.html Vielen Dank für eure Antwort!
-
Danke! Das klingt doch schon mal gut. Würde mich freuen, wenn ihr uns auf dem Laufenden halten würdet.
-
Beim Suchen findet man schon vereinzelt Daten zum LED Strip Bricklets. Zu meiner Verwunderung gibt es hier noch keine Posts. Ich würde gern wissen: - wann wird das Bricklet ca erscheinen? - wie lang dürfen die LED-strips sein, die man anschließen kann? Vielen Dank schon mal, ich bin sicher, dass ich nicht der Einzige bin, der gespannt wartet