




knotti2010
Members
-
Benutzer seit
-
Letzter Besuch
-
Danke m0d, Nach sowas habe ich schon lange gesucht Werde ich nachher mal ausprobieren. Mal schauen ob ich das zum laufen bekomme. Stellt sich dann nur noch die Frage wie ich dann die Oberfläche auf einem normalen PC auswerte usw. Da muss doch der Pi dann als Server konfiguriert werden, oder?
-
Den Unterbau habt ihr ja schon gefunden. Kostet ca. 30-40 Euro. Das einzigste was mich vom Pi abhält ist eigentlich die Tatsache das ich mich damit nur sehr gering auskenne und auch nur die Programmiersprache C# kann. Ein nächstes Problem damit wäre dann wohl die Windows Anwendung welche ja den Roboter steuern soll und die Daten der Sensoren (zB Temperatur o. Umgebungshelligkeit) auslesen soll. Zu der Problematik Akku hab ich mir auch schon einen Kopf gemacht ich schwanke noch zwischen 6 AA Akkus mit ca. 2600 mAh oder einen Akku Pack wie es auch im Modellbau eingesetzt wird.
-
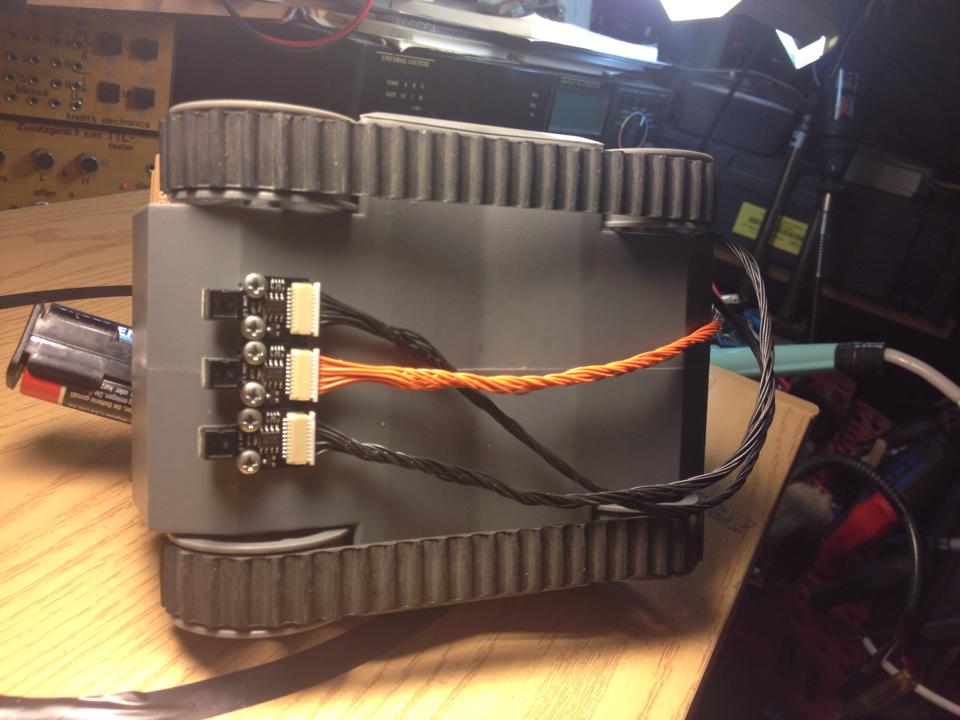
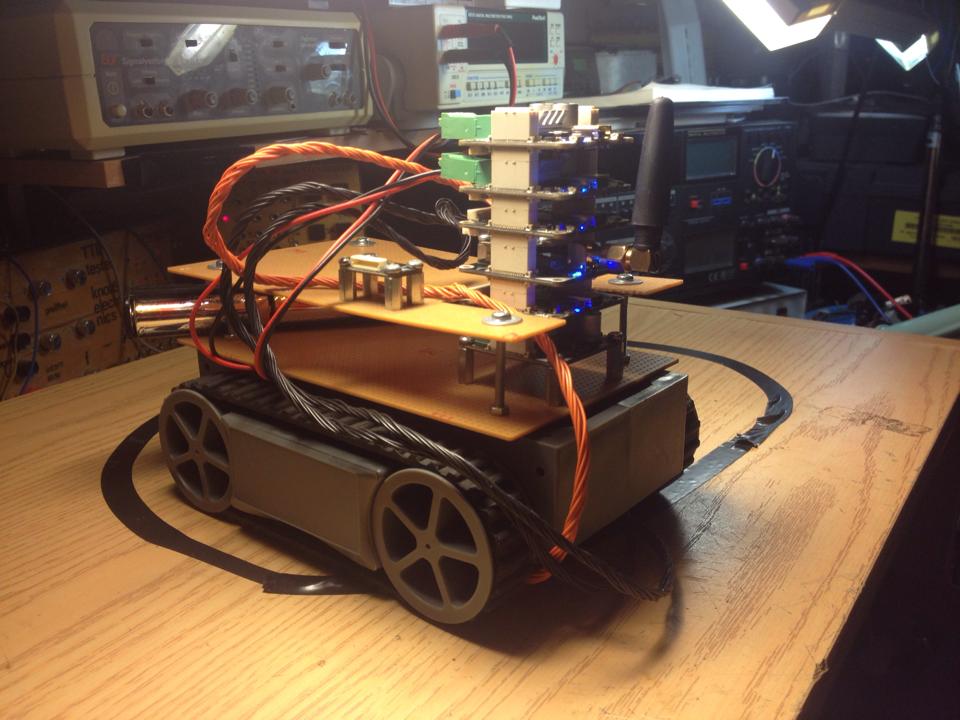
Hallo Tinkerforge-Gemeinde! wollte euch mal kurz mein anstehendes Projekt für meine Seminarfacharbeit zeigen. Thema ist: "Planung, Bau und Programmierung eines C# gesteuerten autonomen Roboters mit Hilfe von Tinkerforge" Ich bin bis jetzt auch gut vorangekommen, hätte nun aber ein paar Fragen zur Linienerkennung. Habe (wie man hoffentlich auf den Bildern erkennen kann) 3 Line-Sensors auf der Unterseite des Fahrgestells montiert, und lasse diese jetzt mit Hilfe des Threshold-Callbacks auslesen.. Nun habe ich aber nur eine einfach if Abfrage programmiert. Bei der, der Rover ziemlich "unflüssig" die Linie entlangfährt (leider per WLAN auch nur mit halber Geschwindigkeit, da sonst die Befehle nicht sofort verarbeitet werden, Besserung erhoffe ich dann durch den RED-Brick! ). Und nun währe die erste Frage ob ihr eine Formel kennt, welche die Differenz oä. von den Line-Sensors auswertet und eine "flüssige" Erkennung der Linie liefert. Verbaut sind bisher: 1 Step-Down-Power-Supply 2 Master-Bricks 2 DC-Bricks 1 WIFI-Extension 3 Line-Sensors Hier mein bisheriger Code: Später soll dann auch noch die Umgebung per IR-Sensorik abgetastet werden, vllt. gibt es dafür ja eine ähnliche Lösung. Vielen Dank schonmal im Vorraus

-
Vielen Dank für den Tipp!
-
Ich habe mittlerweile herausgefunden, dass wenn ich die IP-Verbindung nicht beende (also die Zeile ipcon.Disconnect() herausnehme) es funktioniert.
-
Hallo Community, ich habe vor mit dem IO16-Bricklet, 8 Relaisausgänge zu überwachen mit Hilfe eines Interrupt-Callbacks. Hier mein Versuch: using Tinkerforge; namespace WindowsFormsApplication4 { public partial class Form1 : Form { public Form1() { InitializeComponent(); Main2(); } private static string HOST = "localhost"; private static int PORT = 4223; private static string UID_IO16 = "b5W"; static void InterruptCB(BrickletIO16 sender, char port, byte interruptMask, byte valueMask) { MessageBox.Show("ausgelöst"); } static void Main2() { IPConnection ipcon = new IPConnection(); BrickletIO16 io16 = new BrickletIO16(UID_IO16, ipcon); ipcon.Connect(HOST, PORT); io16.Interrupt += InterruptCB; io16.SetPortInterrupt('b', 129); //texttobox("Interrupt deklariert"); ipcon.Disconnect(); } } } Jedoch wird das Callback beim Anziehen eines Relais nicht ausgelöst.. Bin leider noch ein Anfänger, aber in einer Konsolenanwendung funktioniert dies ohne Probleme.