

BorgelMorgel
-
Gesamte Inhalte
147 -
Benutzer seit
-
Letzter Besuch
Posts erstellt von BorgelMorgel
-
-
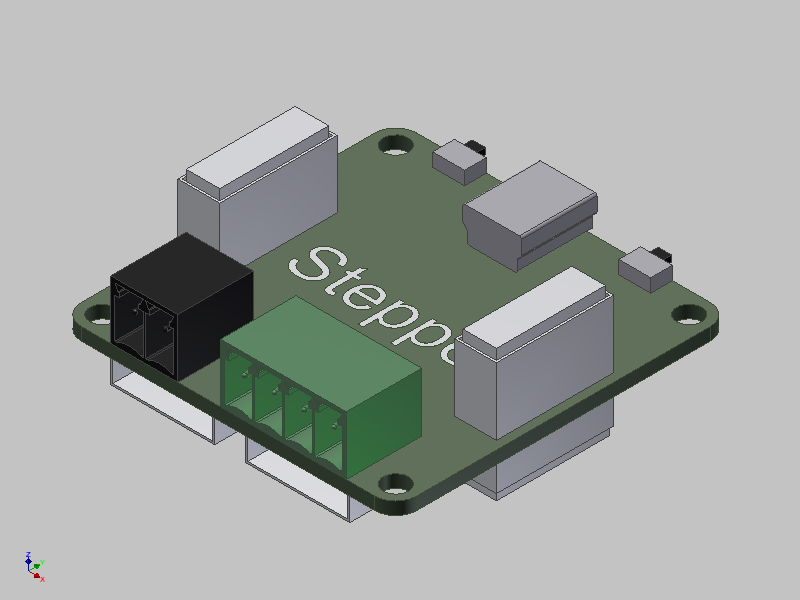
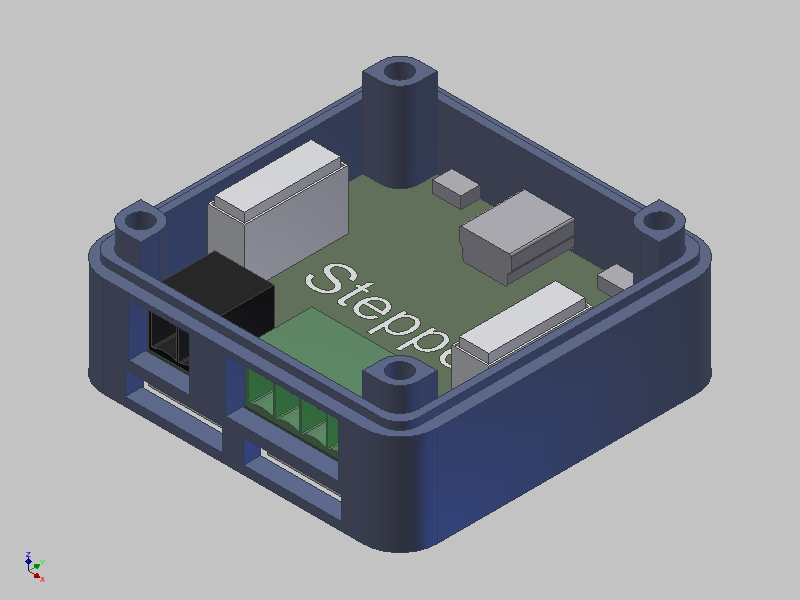
So, hier mal das Gehäuse für den Stepper Brick. Könnte höchstens Probleme bei dem großen Anschluss geben, beim Drucken. Aber wenn man da eine dünne Dammiwand reinsetzt, welche man dann rausbrechen kann sollte das ja gehen. Dekel und Boden folgen noch. Servo bin ich noch am überlegen. Hab heute mit einem Kollegen an unserem eigenen Projekt mal weitergearbeitet. Das werde ich die Tage mal darstellen.
@luxor Wie und in welchem Format sollich dir das Servo und Stepper Gehäuse für einen Testdruck zukommen lassen?

-
Hallo,
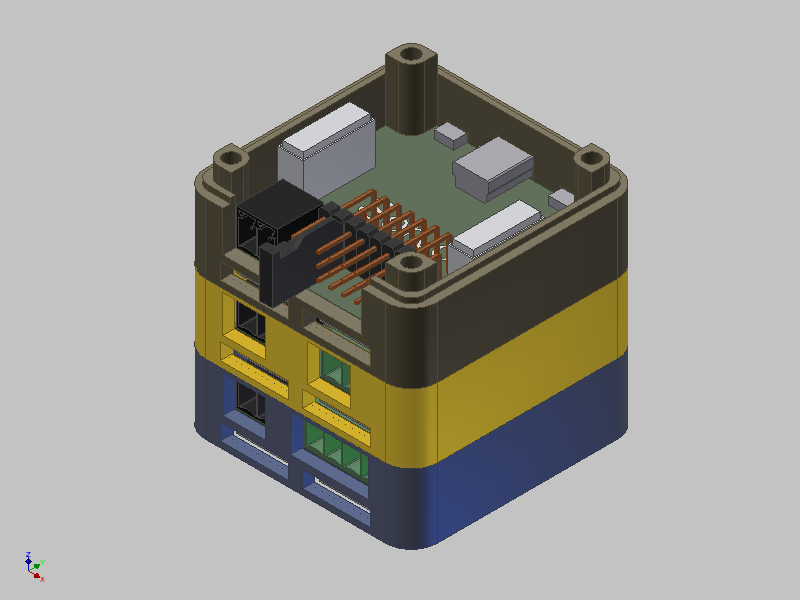
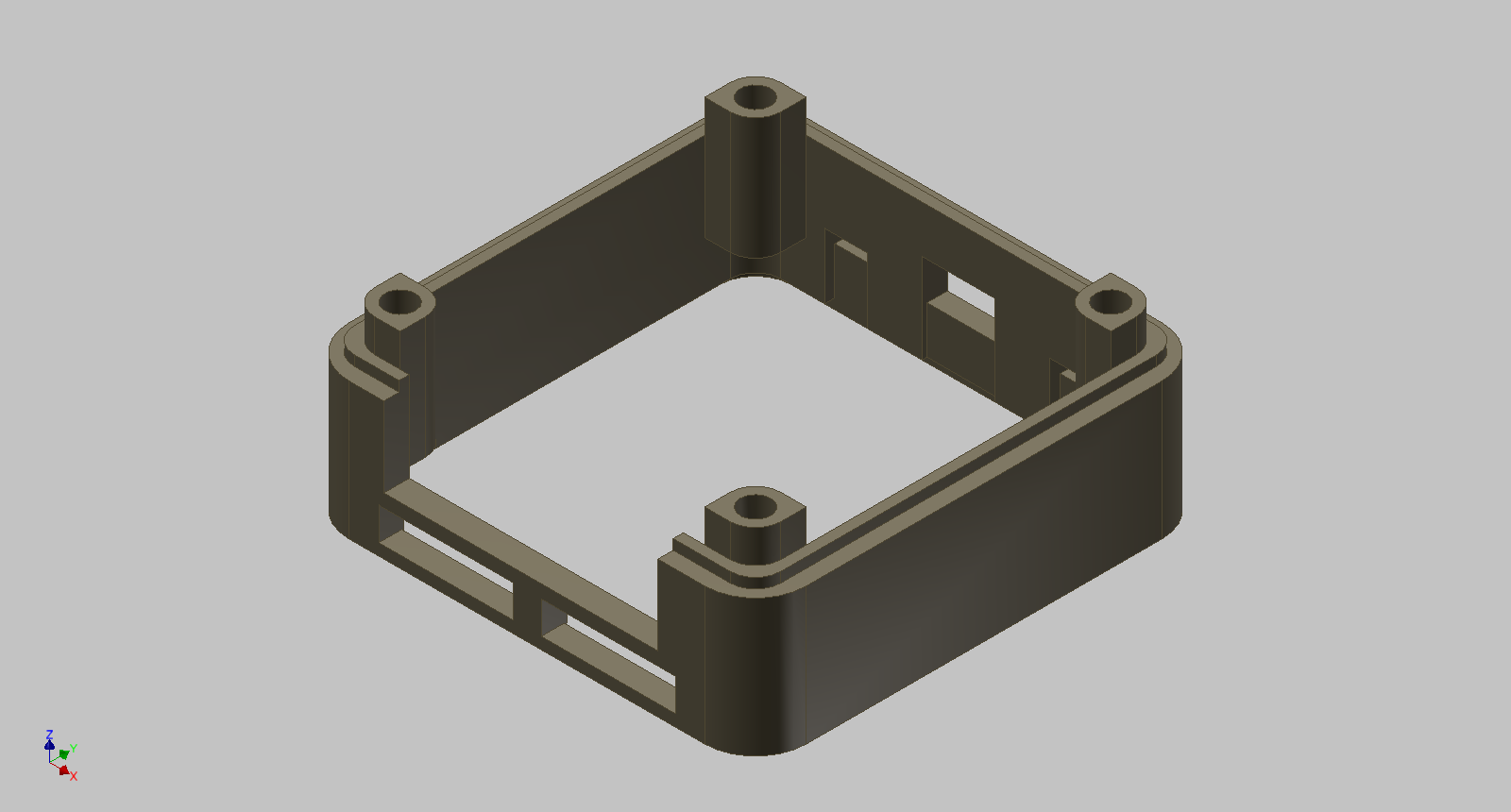
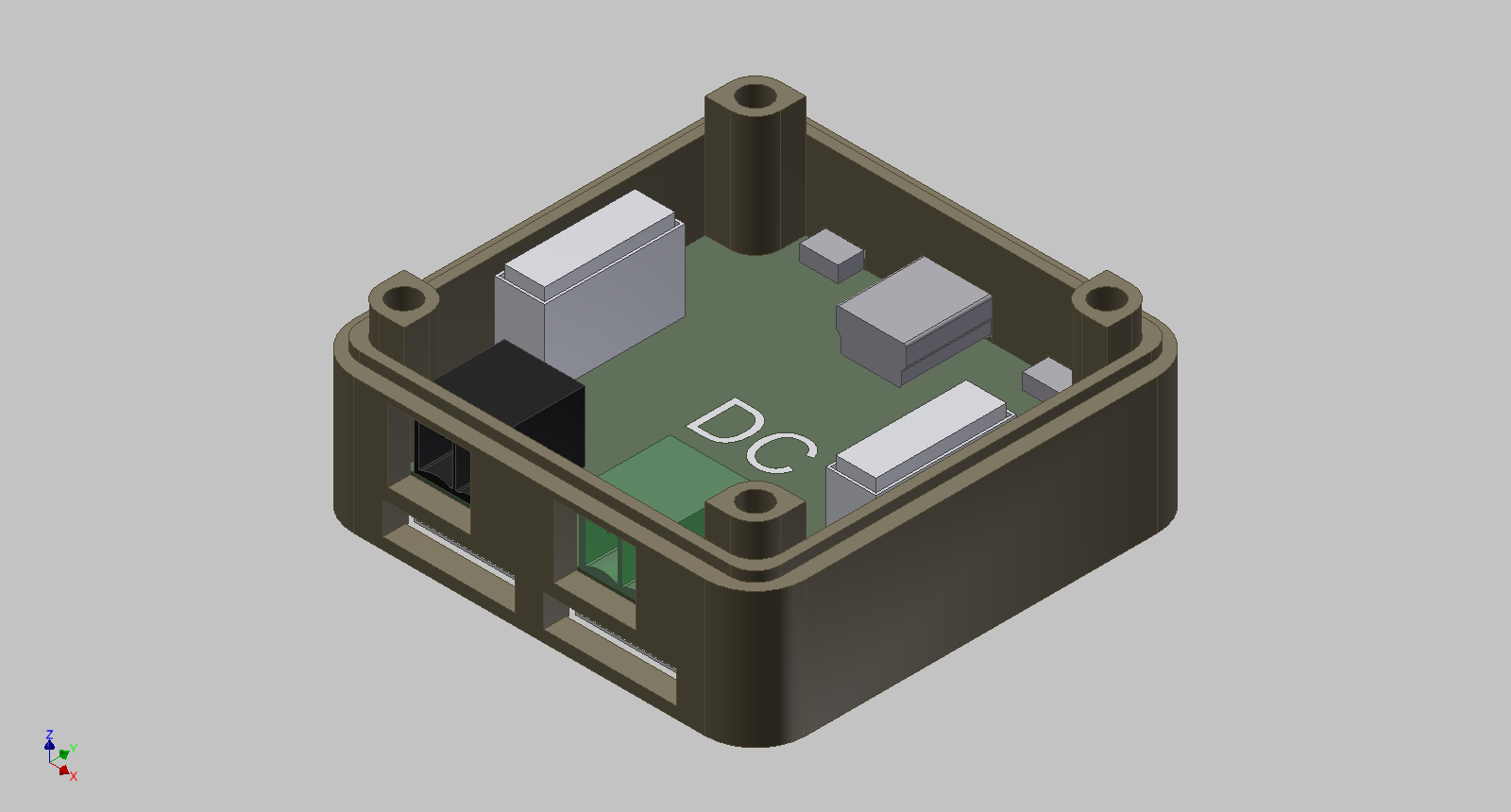
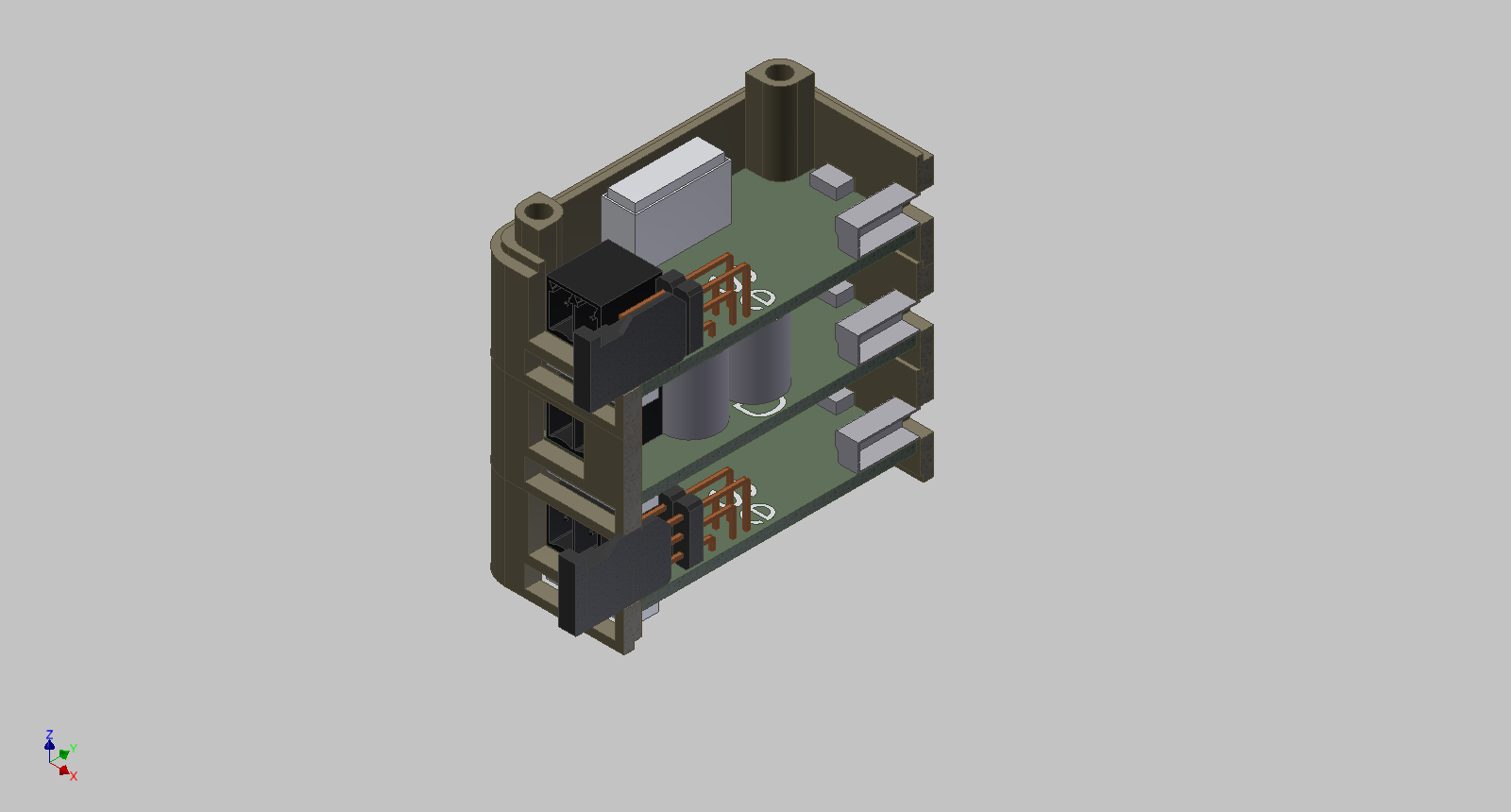
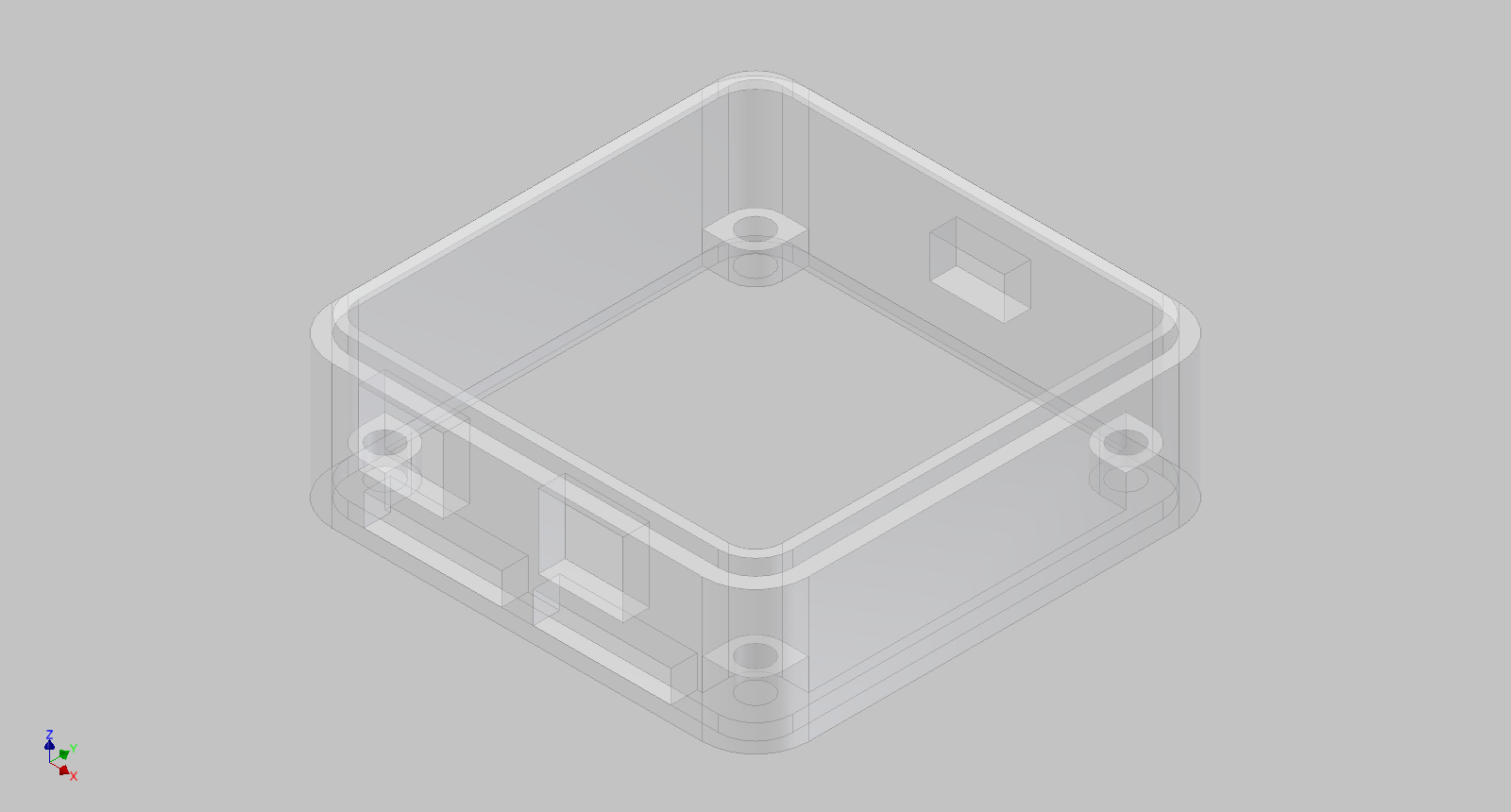
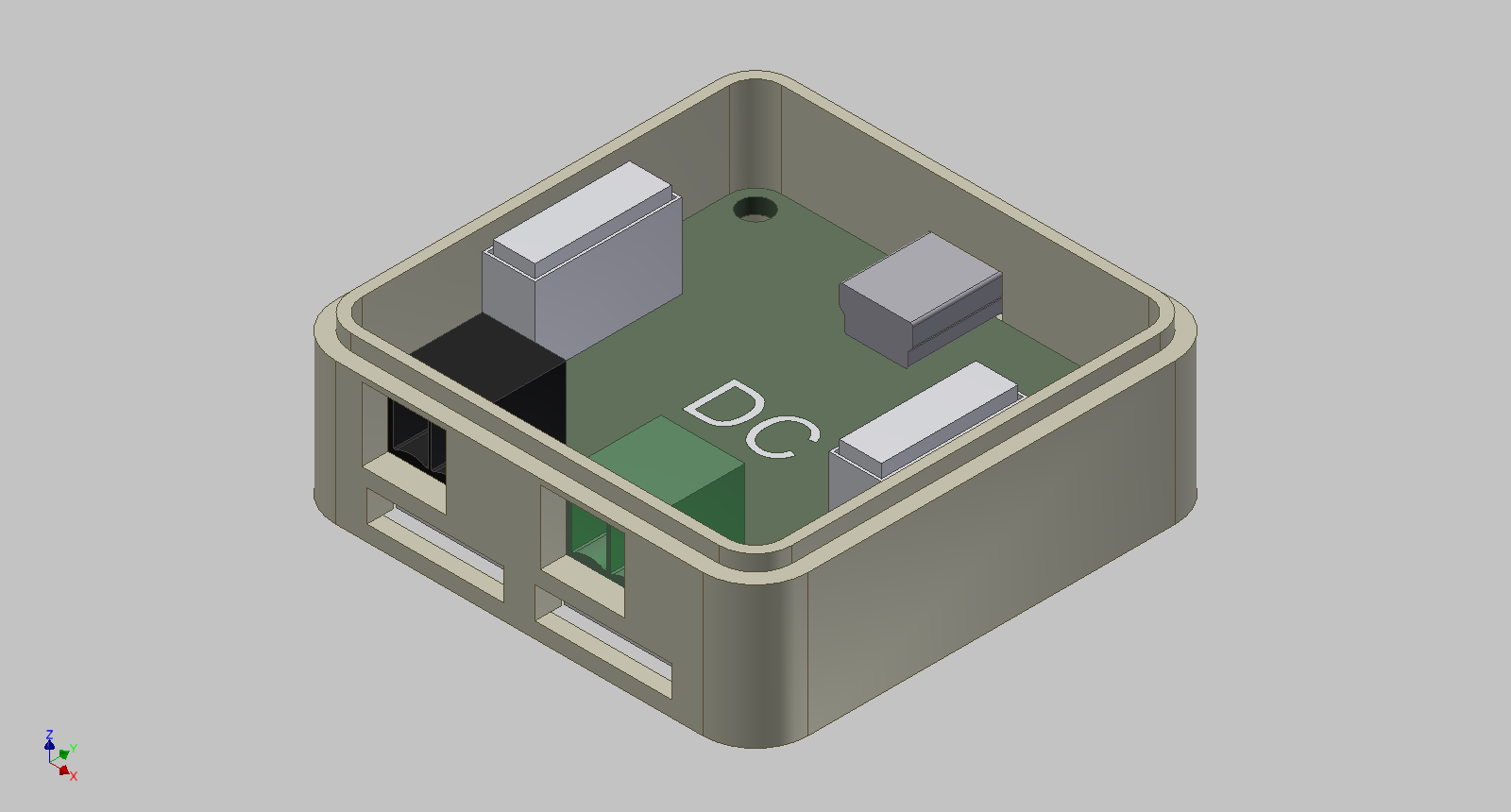
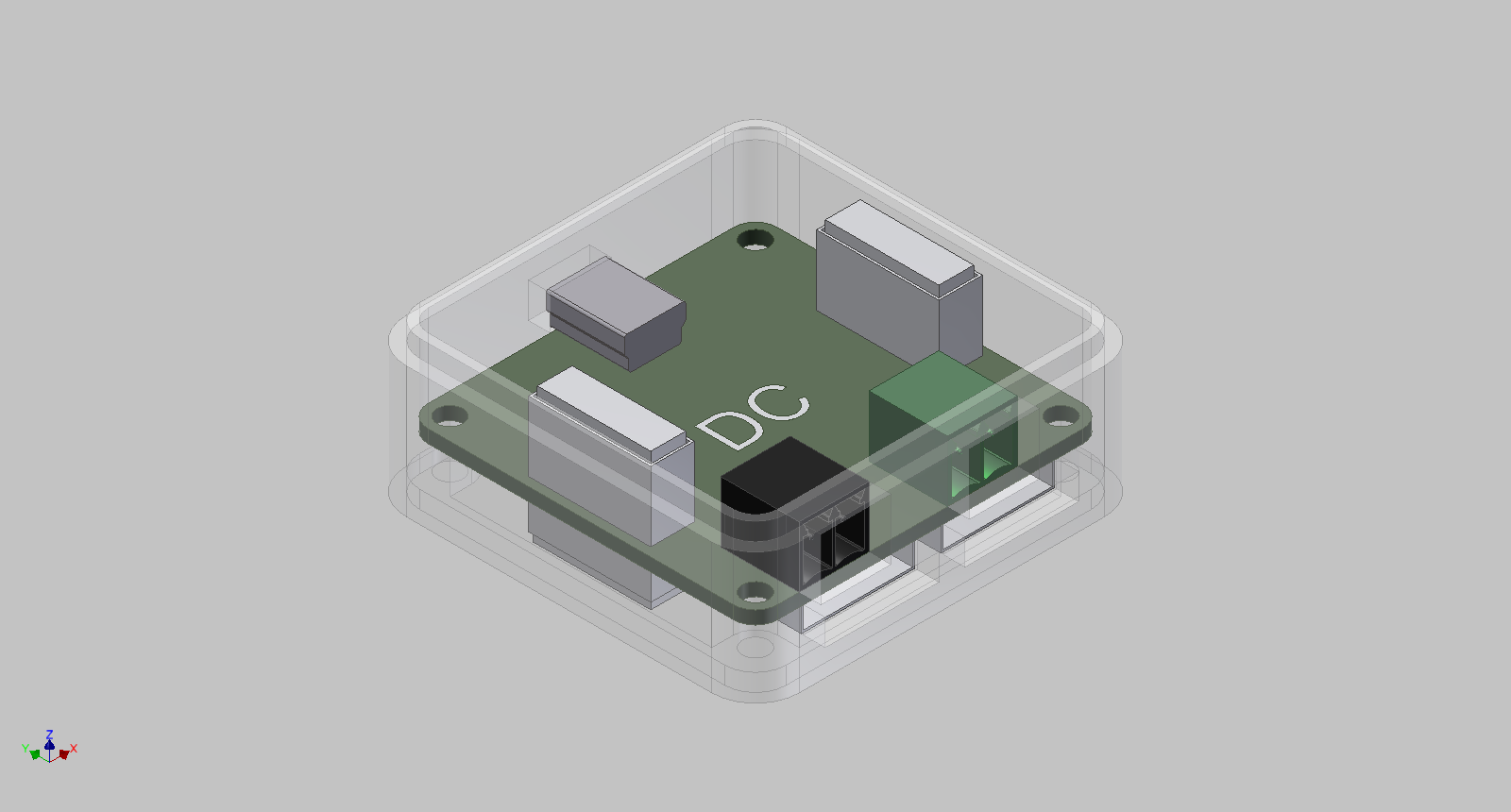
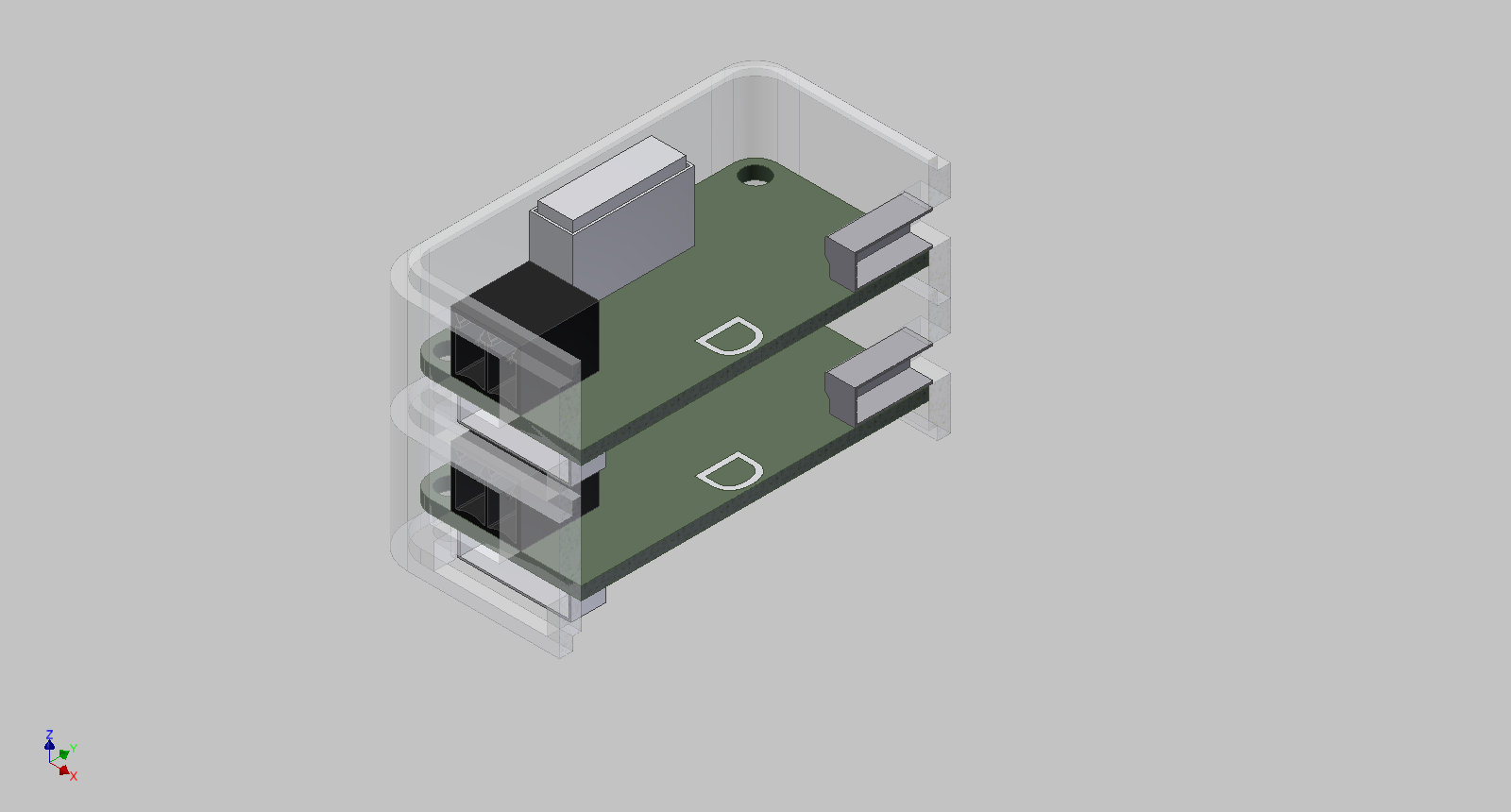
hab jetzt mal je ein Gehäuse für den DC und Servo Brick erstellt. DC ist weniger problematisch, ärger macht mir der Servo. Die Anschlüsse der Servos sind ja genormt, hab mal einen nachgebildet und dann eine Kollisionsabfrage gemacht. Resultat ist anhand des Stapels sichtbar. Selbst wenn ich beim Servogehäuse das oberen Rahmenteil weglasse, kollidiert der Stecker mit dem darüberliegenden Rahmen. Höher kann ich sie nicht machen, da sonst die Stapelverbindung unterbrochen wird. Man könnte also der Servobrick nur oben draufsetzen und dann einen anderen Deckel nehmen.
Werde das jetzt noch für die anderen Bricks machen, vielleicht muss ich das Konzept nochmal überarbeiten. Aussparungen für die Anschlüsse sind vorhanden, auch für das Einsetzen von unten. Deckel und Boden reich ich noch nach. Was ist eure Meinung dazu?
@luxor Was meinst du, sind die Gehäuse druckbar?
-
Ich werde das Teil morgen fertig machen und luxor bereitstellen.
@luxor hast du den DC Brick zur Verfügung? Sonst passe ich das Gehäuse an eins an welches du hast.
Die WiFi Erweiterung kann ich leider nicht berücksichtigen, da ich keine habe.
-
Richtig, ist halt mist wenn man ein bestehendes Modell umarbeitet. Hätte ein neues machen sollen. Werd ich nachholen. Natürlich müssen die Aussparungen von unten ran.
Danke für den Hinweis jan
-
Hi,
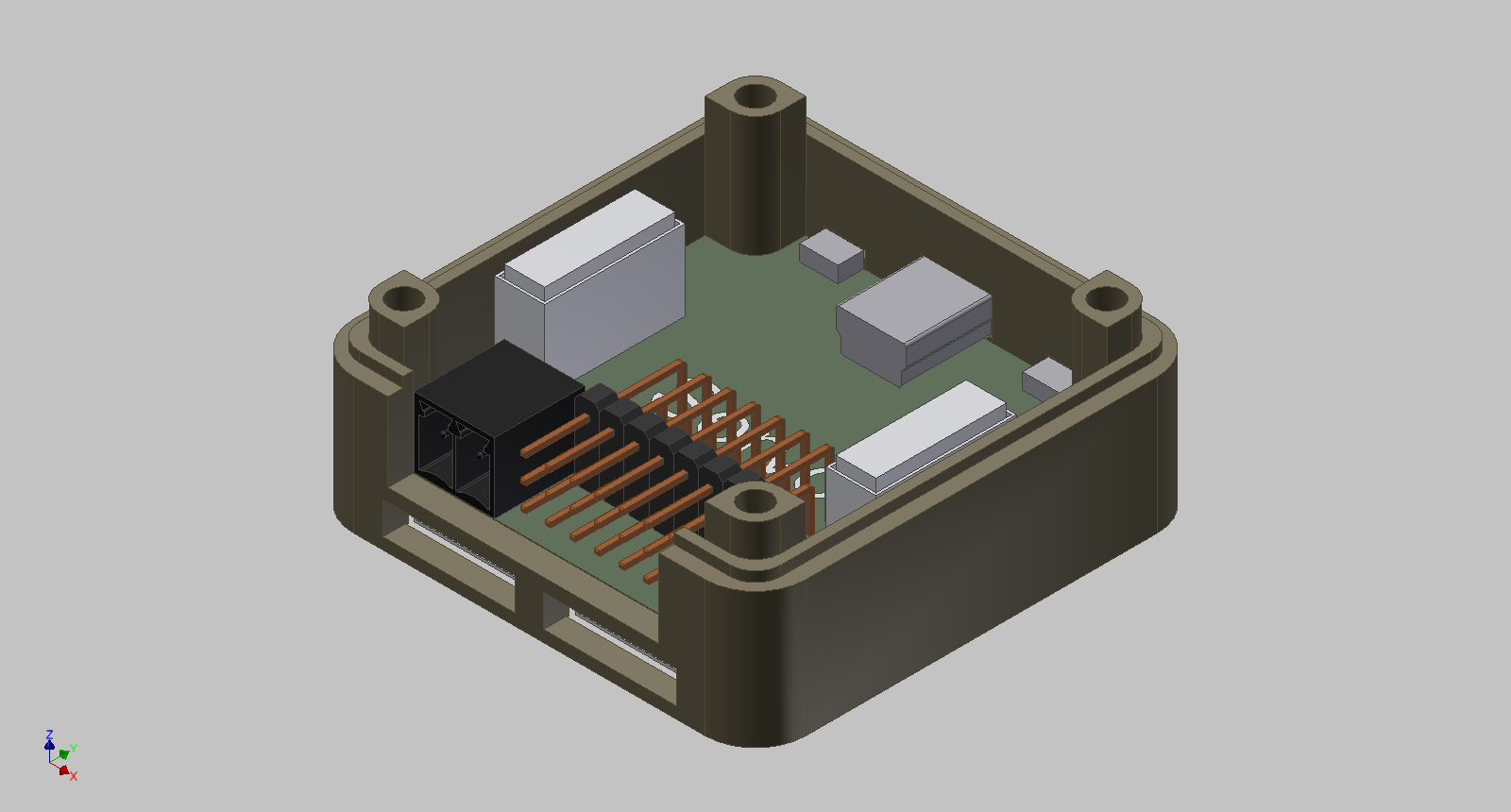
hier mal ein kurzer Blick auf die aktuellen Stand. Hab heute leider nicht so viel Zeit. Aber ich bleib dran. Die Überstände der Anschlüsse hab ich auch bemerkt und beim USB-Anschluss schon mal berücksichtigt. Die Maße sind natürlich nur grob, da muss ich noch mal feiner ran (hol dann erst mal meinen Messchieber ab).
-
Weiß noch nicht ob ich das bis heute Abend fertig hab, werd aber das Wochende dran basteln.
@luxor
konnte die Datei nicht öffnen, keine Ahnung warum. Wie stark unterscheiden sich deine STL datein von den ausgangs STEP Datein?
-
@photron
Danke für den Hinweis, bin vorhin auch auf ein befestigungsproblem gestoßen was damit gelöst wäre. Ich werde das mal umarbeiten.
PS: die Zeichnung sieht aus als hättet ihr die Bricks in Minecraft nachgebaut ^^
aber sie ist verständlich
-
luxor, könntest du mal ein einfaches Teil von dir im STL, welches schon zum drucken bereit ist bereitstellen. Da kann ich mal schauen was ich noch ändern muss!
-
Nutze Autodesk Inventor 2012 Pro, kann eigentlich fast alle gängigen Formate erzeugen, unteranderem STEP oder gleich STL!
STL brauch ich auch für ein Simulationsprogramm, ist ein ziemlich solide Sache und gängig in der Industrie/Forschung
Maße waren jetzt grob abgenommen, müsste ich noch mal genauer machen. Muss auch noch prüfen wie das mit der Verschraubung passt.
-
Hi, hab mir auch mal Gedanken gemacht.
Wie genau verhält sich das beim Drucken mit den Aussparungen für die Anschlüsse? Wird da nur ganz dünn gedruckt und das dann rausgebrochen. Wie stabil ist der Kuststoff, hab die Videos gesehen die auf der Seite waren von den Niederländern, da gab es ja auch sowas wie Gummi (siehe Becher).
Man bräuchte natürlich noch ein Anfangs- und Endstück. Die Idee alles mit Gewindestangen zu verbinden, halte ich für ganz praktikabel.
-
Hi,
hast du da noch eine spezielle Software vom Hersteller der die STL für den Drucker verständlich Umsetzt? Kannst du in der die Schichtdicke einstellen oder brauchst du da einen anderen Druckkopf? Was meinst du mit lernen, in Bezug auf den Drucker?
Grüße
-
Hi,
vielleicht wäre als einfache Wegerfassung auch ein Seilzugpoti denkbar. Dieses gibt ja in Abhängigkeit vom Ausfahrzustand des Seils einen dazu passenden Spannungswert aus, welcher sich ja mit dem Analog In Bricklet erfassen ließe. Man hätte also bei geschlossenem Tor den Draht sehr weit abgewickelt und würde beim Öffnen den Draht aufwickeln. Wenn man es einmal richtig kalibriert kann man jede beliebige Stellung des Tors erfassen (wenn es in der Programierung berücksichtigt wird). Auch die Richtung des Tors ließe sich bestimmen durch Zu- oder Abnahme des Spannungswertes. Den Draht des Poti könnte man im Rahmen des Tors verbergen so ist er auch gleich geschützt.
Vom Aufwand her wäre dies vermutlich geringer und die Poties sind sehr zuverlässig. Bei einem Garagentor kommt es ja auf die Öffnungsart an, evtl. eignet sich hier kein Seilpoti aber vielleicht ein Drehwinkelpoti, den man an einer Laufrolle anbringt.
Gängige Poties geben (0 ... 10)V aus und die meisten verkraften eine Versorgunsspannung von bis 36V oder mehr.
Grüße
-
Dem kann ich nur zustimmen. Ein Hinweis reicht, es muss keine Rechtfertigung sein.
-
Tutorial -> Phase 2: Ein eigenes Programm schreiben -> Absatz 2
Dies kann mit jeder der unterstützten Programmiersprachen geschrieben werden. In diesem Tutorial wird Python verwendet, das Python einfach zu lesen und zu verstehen ist. (nur da)
-
Richtig, da müsste auch die Mehrzahl hin.
-
Hallo TF-Team,
mir sind beim Durcharbeiten eurer Tutorials ein paar unschöne Fehler aufgefallen die ich euch hier mal mitteilen möchte, damit ihr die abstellen könnt. Ich habe die Fehler markiert. Hab keinen passenden Trade gefunden, darum hab ich einen neuen gemacht.
Tutorial -> Phase 2: Ein eigenes Programm schreiben -> Absatz 2
Dies kann mit jeder der unterstützten Programmiersprachen geschrieben werden. In diesem Tutorial wird Python verwendet, das Python einfach zu lesen und zu verstehen ist. (das "s" muss weg)
Tutorial -> Phase 2: Ein eigenes Programm schreiben -> Absatz 3
Die notwendigen Schritte sind ähnlich für alle Programmiersprachen. Diese Tutorial zusammen mit den Beispielen in der API Dokumentation der verschiedenen Produkte sollte es dir ermöglichen jeden Brick mit allen unterstützten Programmiersprachen zu verwenden.
Der Satz ist komisch aufgebaut und bei "Diese" fehlt das "s" oder aus Tutorial die Mehrzahl machen. Hier mein Vorschlag:
Dieses Tutorial sollte es dir ermöglichen, zusammen mit den Beispielen in der API Dokumentation der verschiedenen Produkte, jeden Brick mit allen unterstützen Programmiersprachen zu verwenden.
Grüße BorgelMorgel
-
Ich denk mal du wirst spätestens wenn die Fräse dran ist und auf vollen Touren läuft probleme mit Schwingungen bekommen. Vor allem bei der Halterung des Schrittmotors der y-Achse. Nicht, dass das nicht profesionell aussieht, aber an bestimmten Punkten musst du später bestimmt nachbessern. Die Fräsen können ja schließlich bis 40k U/min. Halterung sind irgendwie immer Mangelware. Alle die ich kenne, die ein solches Projekt betreiben oder betrieben haben, haben sich selber eine gebaut. Bei Maschinenfräse sind am Gerät natürlich Haltepunkte vorhanden und es gibt auch fertige Halterungen, aber die kosten auch gleich das Dreifache!
Wie möchtest du das zu bearbeitende Werkstück auf der Fräse befestigen?
Hast du dir schon eine Absaugung überlegt? Bei Holz würde ich dir das dringend empfehlen.
Wo hast du dir den Kabelschutz/-führung besorgt? (siehe Bild)
-
@thunderbird
Bleibt das eigentlich bei dem Holzgestell? Was nimmst du als Fräswerkzeug (Gerät)?
-
@gagahhag
Also bei mir ging es mit dem VLC-Player problemlos (Version 2.0.3).
@thunderbird
Ein sehr schöner Test, wie schnell bewegt sich eine Achse in der Finalversion? Welche Schrittauflösung hast du für den Motor festgelegt?
-
Danke schön. Ich stell mal die Seiten rein die ich mir so gesucht habe:
Das Thema CNC Fräse lässt mich auch nicht richtig los. Hab vor einer ganzen Weile mal ein Entwurf gemacht, weil mein Cousin sich eine gebaut hatte und ich davon ziemlich beeindruckt war. Vielleicht greif ich das jetzt mal wieder auf und versuche die Probleme zu lösen.
-
@thunderbird
Verrätst du mir den Hersteller der Gleitschienen, Gleitschlitten, Spindeln und Spindelmuttern, wo du die erworben hast und was das für deinen Geldbeutel bedeutet hat?
-
Auf den Bildern sind die Schrittmotoren deutlich zu erkennen. Sie sind, denke ich, direkt mit der Spindel verbunden, auf der dann eine Spindelmutter gleitet. Somit wird die Drehbewegung in eine Linearbewegung umgewandelt. Das vermute ich zumindest anhand der Bilder. Ich würde zu Drehmomentensteigerung und mechanischen Entkopplung der Schrittmotoren aber ein Riemengetriebe dazwischen bauen. Eine Untersetzung von 3:1 denke ich wäre passend.
@thunderbird
Was möchtest du damit fertigen? Vorallem welche Materialien lassen sich damit bearbeiten?
-
Hi,
also unter dem folgenden Link findest du eine ganze Auswahl an Schrittmotoren:
http://www.mechapro.de/shop/Schrittmotoren:::21.html?XTCsid=f8hhovnlqplef6ge51c6h4m8d1
Beachte aber, wenn du ein hohes Drehmoment abforderst das dann auch die Stromstärke rasant ansteigen kann. Du musst dann die Grenze des Stepper-Bricks beachten, oder eine Schrittmotoren-Endstufe verwenden. Im Schrittmotoren Blog findest du gegebenenfalls auch geeignete Literatur (2ter Artikel von oben):
http://www.schrittmotor-blog.de/
Gruß
-
Danke für das Bild. Du hast keine Portalfräse, was dir daher schon mal einige Probleme erspart. Wenn du eine Übersetzung dazwischen baust, also z. B. ein Riemengetriebe würde ich den Motor auf einer Verschiebbaren Platte montieren um den Riemen spannen zu können. Je nach Wahl der entsprechenden Riemenräder (unterschiedlicher Durchmesser) und derer Anordnung lässt sich das Drehmoment bzw. die Drehzahl beeinflussen. Dazu gibt es einiges an geeigneter, nicht zu komplexer Literatur. Du sollst ja nicht gleich ein Getriebe entwickeln ^^
Mit der Versorgung musst du halt seh welche Motoren du kaufst. Halte aber lieber etwas Reserve für die Grenzbereiche. Ansonsten sollte das gehen. Wenn du kein passendes Netztteil parat hast kannst du dir ja auch eines selber Löten. Günstige Bausetze gibt es ja eine Menge.
Was nutzt du als Gleitschiene für die Achsen? Welche Drehzahl hat deine Fräse, die du benutzen willst und was soll damit bearbeitet werden?
Hast du eine Wegrückkopplung angebaut, oder was ist das für ein blauer Propeller auf der Achse im Vordergrund deines Bildes? Handelt es sich da um ein Hall-Sensor?
Ich habe mal eine Portalfräse angefangen, bin aber auf einige Probleme gestoßen und musste das Projekt aus Zeitmangel ersteinmal hinten anstellen.

Gehäuse für Bricks und Bricklets
in Allgemeine Diskussionen
Geschrieben
Hallo luxor,
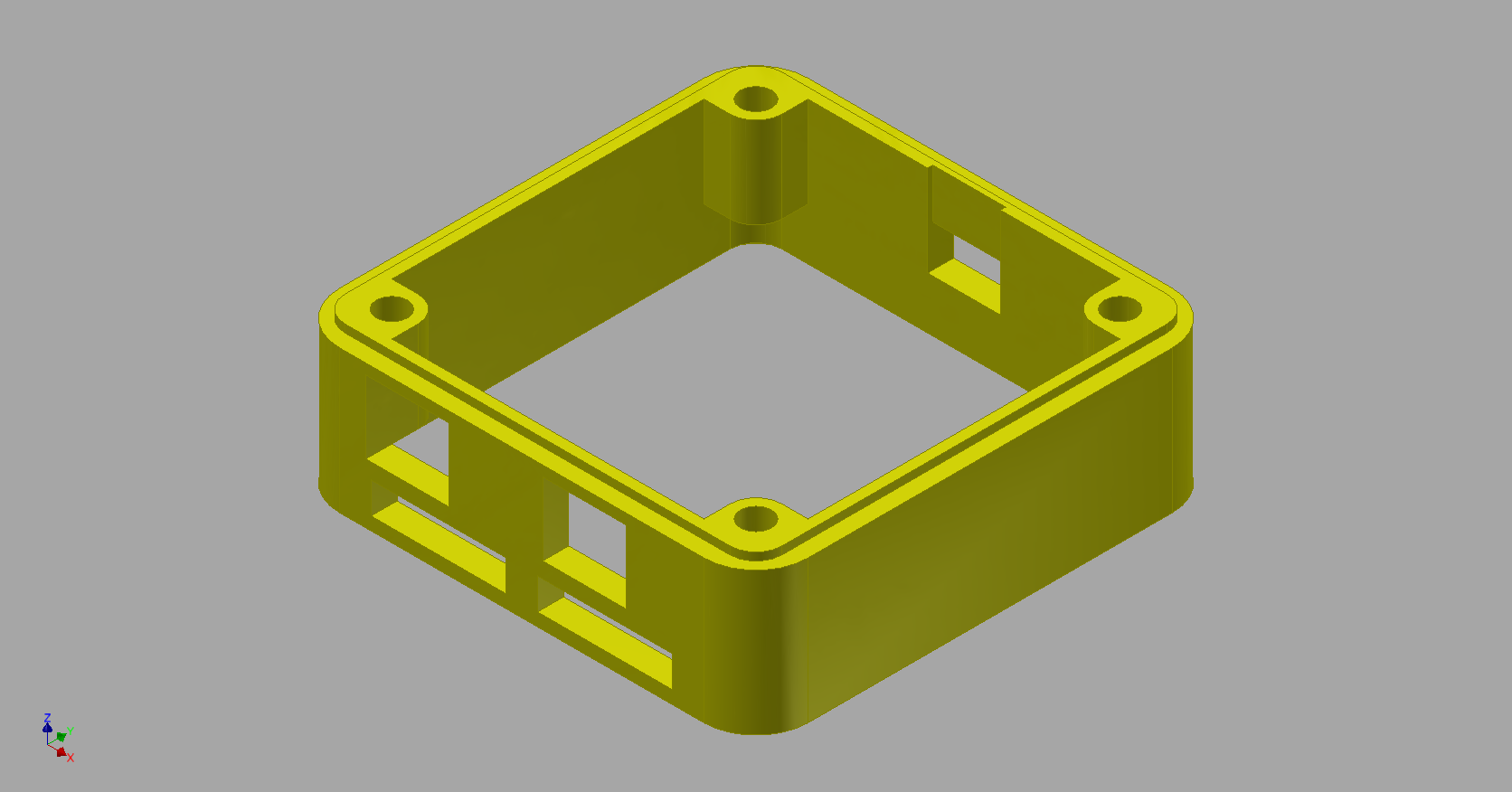
ich hab dir mal die STL Datein im Anhang beigefügt. Die Wandstärke beträgt an der dicksten Stelle 2,5mm. Die Maße wurden mehr oder weniger genau aufgenommen, Nacharbeit und Anpassung wird aber nötig sein. Wenn du bereit bist mal einen Testdruck zu machen, kann ich entstandene Probleme ja dann abstellen. Hoffe das du die Daten lesen und verarbeiten kannst. Hoffe auch das ich heute mal dazu komme die Boden- und Deckeleinheit zu machen.
Grüße
Brick_40x40_Servo_Gehaeuse.stl
Brick_40x40_Stepper_Gehaeuse.stl