BorgelMorgel
Members
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von BorgelMorgel
-
Einfache Antwort: Mir ist es schon passiert das sich ein Pin verbogen hat und wir haben schon oft lose Kabel an schwingungsempfindlichen Aufbauten beobachtet. Aus diesem Grund kann ich die evtl. Entscheidung für einen neuen Steckertyp, welcher diese Probleme nicht mehr aufweist nur begrüßen.
-
Da es sich ja um eine angetriebene Achse handelt, passt das mit dem Linearantrieb sehr gut. Ich würde den Namen des Kits nicht auf eine bestimmte Anwendung festlegen (Kamera), denn dazu ist er zu universell einsetzbar. Monorail, Mono-Achsen-Antrieb, Ein-Achsen-Antrieb oder Linearachsenantrieb. Das würde glaube ganz gut passen.
-
Ich fände eine USV auch eine feine Sache, vor allem in Hinblick auf das RED. http://www.pimodules.com/index.html Die bieten sowas für den Pi an und mit der haben wir gute Erfahrung gemacht. Bei der Größe hätte ich so an das LCD gedacht. Gerade bei Messstationen sind Stromausfälle sehr ärgerlich und führen immer zu Datenverlust. Der Akku mit 2600mAh ist ausreichend. Es soll ja kein Dauerbetrieb gewährleistet werden, nur eine kurzzeitige Überbrückung. Ein paar Einstellungen muss es auch bieten, also Grenzen festlegen und automatische Abschaltefunktion usw. Ein weiterer Punkt ist die Verbesserung des Hall-Bricklets, sodass man damit höhere Drehzahlen messen kann und eine hohe Aufnahmegeschwindigkeit hat (ähnlich dem Industrial 20mA Bricklet). Längere Kabel wären auch gut. PS: Ach ja, da ich ja aus dem Fahrzeugbereich komme, wäre ein CAN-Bricklet nach wie vor schön.
-
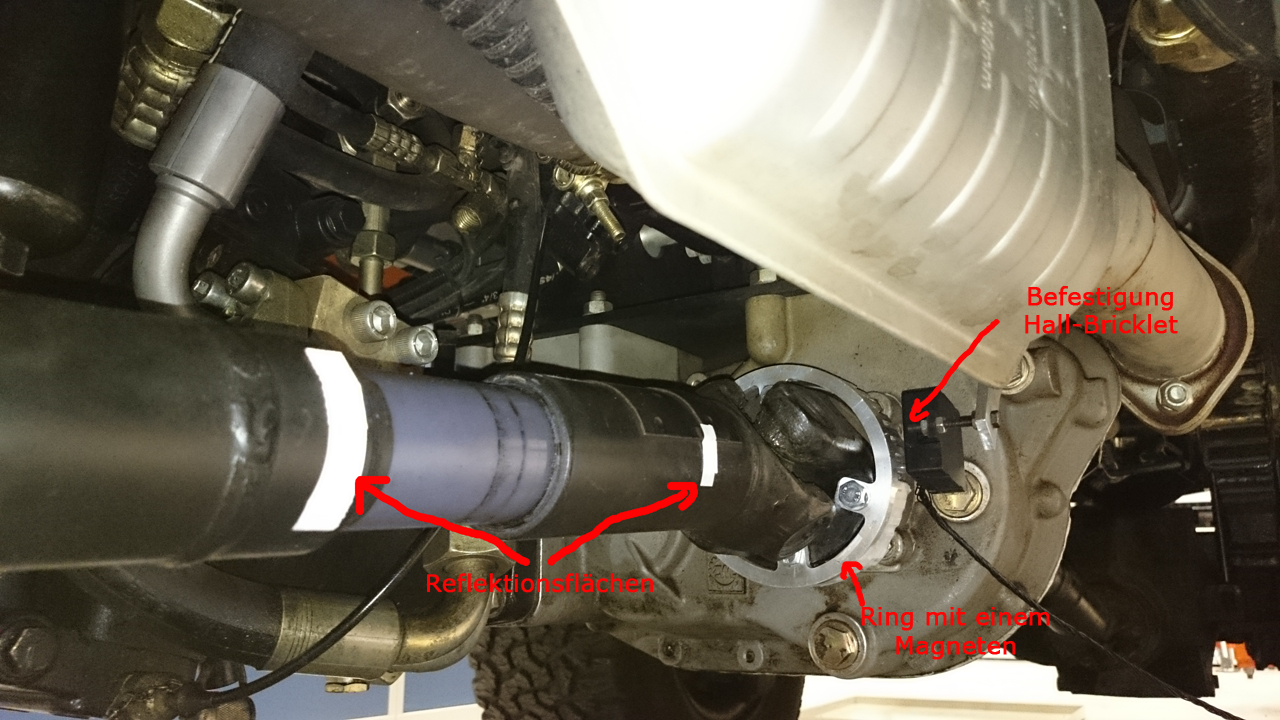
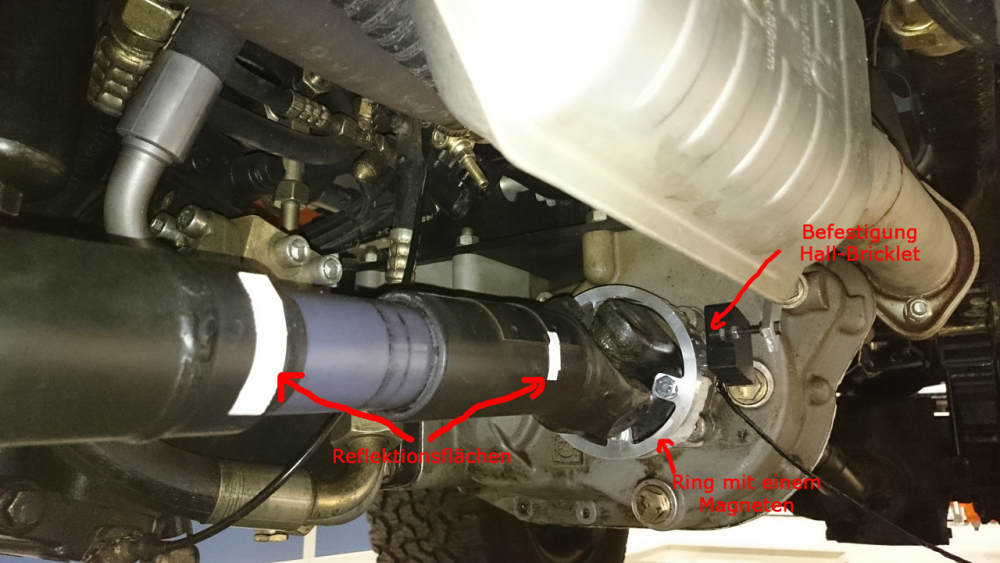
Hier die versprochenen Bilder:


-
Hallo KMT, ich stehe vor genau dem gleichen Problem und konnte auch noch keine Lösung finden. http://www.tinkerunity.org/forum/index.php/topic,2421.0.html Ich möchte zwar an einem größeren Bauelement messen, bekomme aber auch keine konstanten und zuverlässigen Werte vom Bricklet. Leider habe ich bis jetzt auch keine Antwort. Ich werde dann gleich eine Kontrollmessung machen und mal paar Bilder vom Messaufbau bereitstellen. Gruß
-
Hallo, ich versuche seit geraumer Zeit mit dem Hall Bricklet die Drehzahl einer Antriebswelle zu messen. Dazu habe ich an dieser einen Ring mit Magneten befestigt und das Bricklet darauf ausgerichtet. Allerdings ist schon im Viewer gut zu sehen, dass keine konstanten Werte heraus kommen. Nun hab ich einiges probiert um den Fehler zu finden, jedoch ohne Erfolg. Was mir in der Doku fehlt sind Angaben zur maximalen Aufnahmefrequenz. Ich habe die Vermutung, dass das Bricklet nur für sehr langsame Drehzahlen geeignet ist (also wie schon die Beispielanwendung Strom/Gas-Zähler). Ich habe versucht das mit einem Akkuschrauber, in den ich den Ring eingespannt habe, zu validieren. Auch das Entfernen von Magneten brachte keinen Erfolg. Ebenso der Wechsel gegen sehr schwache Magneten. Hab erst diese Magneten verwendet: http://www.conrad.de/ce/de/product/505926/NdFeB-Magnet-Rechteck-L-x-B-x-H-5-x-5-x-5-mm-Material-N35-Remanenz-118-124-T?ref=list Ich hab es aber auch mit solchen einfachen Magnetklebern versucht. Der Versuchsaufbau bestand aus PowerSupply + Master + Hall-Bricklet. Hab den Supply auch mal weggelassen, hatte aber keinen Einfluss. Die Debounce-Zeit hab ich auch mal verringert. Gibt es eventuell Erfahrungswerte bezüglich dieses Themas, oder sind die Fehlenden Angaben jemand bekannt? Vielleicht hat es ja schon bei jemand geklappt, über Hinweise wäre ich sehr froh. Grüße BorgelMorgel
-
Wir beschäftigen uns aktiv mit der ganzen Problematik IMU + GPS usw. Es bietet sich auch ein Kalman-Filter an, um bessere Ergebnisse zu erhalten. http://mechlab-engineering.de/2014/03/verbesserte-positionsschaetzung-durch-kalman-filter/ Niedrige Geschwindigkeiten lassen sich mit GPS nicht zuverlässig erfassen. Das würde nur gehen, wenn man GPS mit einer Basisstation verwendet. Bei mechlab solltest du aber reichlich Infos finden.
-
Unser hydraulischer Demonstrator soll auch in diesem Jahr zur Langen Nacht der Wissenschaft in Dresden zum Einsatz kommen. Im Vergangenen Jahr hat er super durchgehalten. Wir hatten keinen Ausfall und alle Elemente sitzen noch da wo sie sein sollen. Dennoch war ich mit ein paar Sachen unzufrieden und habe mich noch mal dran gesetzt, um einige Verbesserungen vorzunehmen. Auch wenn der Joystick von TF optimal geeignet ist und seinen Dienst tapfer getan hat, so war die Joystickgröße für viele Besucher ein Problem. Deshalb habe ich ihn gegen einen herkömmlichen Joystick für PC-Spiele-Anwendungen ausgetauscht. DAs klappte erstaunlicher weise sehr gut, dank der pygame Bibo für Linux. Ich nutze wieder die beiden Hauptachsen vor, zurück, rechts und links sowie die Diagonalen. Der Joystick kommt jetzt noch in ein Bedienpult, sodass sich der Anwender das wie einen kleinen Bauchladen umschnallen kann. Sinn ist eine Steuereinheit zu bauen, die ähnlich einer realen mobilen Bedieneinheit entspricht. Also typischerweise Bedienelemente für mobile Arbeitsmaschinen. Des Weiteren wollte ich ja eine automatische Rückstellung in die Ausgangslage umsetzen. Hier hab ich lange überlegt und gesucht und hab dann doch mal die DistanceIR von TF ausprobiert. Bei voller Hallenbeleuschtung funktioniert es noch prima. Also wird das jetzt für beide Achsen umgesetzt. Bilder vom fertigen Umbau werden nachgeliefert.
-
Hallo Malik, du meinst vermutlich ein Hexapod, welches bei vielen Simulatoren Anwendung findet. Wir haben Pumpe+Elektromotor, Zylinder und Ventilblock sowie Filter und Druckregler von der Firma Leimbach Modellbau. http://www.leimbach-modellbau.de/ Aber auch Robbe bietet jetzt hydraulische Elemente für Modellbau an, allerding ist die Beschreibung etwas mangelhaft. http://www.robbe.de/catalogsearch/result/?q=hydraulik&profile=1&submit.x=0&submit.y=0
-
Danke Nic, ich werde mir den Artikel mal durchlesen und schauen ob das evtl. passt.
-
@rifmetroid Ich habe von der oberen Querstrebe bis zur Unterseite der Tischplatte 65mm in Waage. Je nach Messposition steigt der Wert auf 120mm oder sinkt auf 10mm. Ich habe das Distance Bricklet mit 2Y0A21 Sensor, der einen Messbereich von 100 bis 800 mm hat. Folglich liegt diese Position außerhalb des Messbereiches. Ich hab auch eine Weile überlegt, ob man es nicht an der Tischplatte befestigt, pendelnd, so dass es immer senkrecht nach unten schaut und diesen Abstand misst. Hier ist der Aufwand sehr hoch und ich müsste außerhalb der Zylinderebene Messen, da sich dort ein Rahmenkreuz befindet, in deren Mittelpunkt das Kardangelenk sitzt. Unten hab ich auch unterschiedliche Bedingungen bzw. Bebauungen die mich da einschränken. Ich werde es dennoch mal mit dem Sensor den ich da hab probieren und ihn etwas weiter unten anbringen. In der Hoffnung, dass das einfallende Licht von oben nicht zu stark stört.
-
Danke Nic, da stand ich tatsächlich in einem Fettnapf. Natürlich weis der jetzt nicht in welche Richtung er steuern/verfahren soll. Ich habe ja keine Weginformation wie zum Beispiel: Weg liegt zwischen 50 und 100mm -> fahre aus! Was meinst du mit zwei Hall Bricklets? Die sollte dem Zylinder direkt gegenüber liegen. Das Bild zeigt einen Schnitt durch eine Mittelebene. Da ich zwei Zylinder habe, brauch ich ohnehin zwei Hall Bricklets. Oder meinst du 2 für eine Achse? Wie das beim Encoder geht, hab ich mir noch nicht angeschaut. Was wäre wenn man auf dem Messstab einen Mittelmagneten anbringt und nach oben weitere drei Magneten und nach unten zwei. Der Hall merkt ja ob sich was ändert oder nicht und man könnte die Anzahl der Änderungen auf eine Variable legen und beim Rückstellscript vorher Prüfen. Zum Beispiel i = 3 -> fahre aus! Der Programmieraufwand sollte sich in Grenzen halten. Man müsste ihn dann nur subtrahieren lassen, bis i = 0 ist und er den Mittelmagneten erreicht hat. Für eine einfachere Lösung bin ich natürlich auch zu haben
-
@Nic Danke für die Hinweise. Die Platte ist mit einem Kardangelenk in der Mitte gelagert, wie du richtig erkannt hast. Da ich aber nur zwei Hydraulikzylinder habe und somit nur zwei Achsen bewegen kann, sind die Diagonalen egal. Ich hab ein Bild angefügt. Ich würde zwei Hall Sensoren benötigen und jeweils gegenüber des Zylinders prüfen, ob der Magnet "da" ist oder nicht. Die Prüfung soll zur automatischen Rückstellung des Tisches dienen und mit dem Taster im Joystick ausgelöst werden. Es soll erst die eine Achse und dann die andere Achse in Ausgangsstellung verfahren werden. Mit den Line Bricklet sollte das auch möglich sein, wenn man statt einem Magnet einen schwarzen Stick auf den geführten Stab positioniert. Das Magnetfeld des Motors ist hoffentlich weit genug entfernt. Ich hoffe das ich hier keinen Denkfehler habe und ich das so umsetzten kann.

-
Mir ist beim Durchstöbern aufgefallen, dass der Link mit den weiterführenden Informationen von der Shopseite aus, auf der Seite des Line-Bricklets, von der deutschen auf die englische Seite führt. Wenn man es in der Adresszeile ändert kommt man auch auf die deutsche, sollte aber bei Gelegenheit mal richtig verlinkt werden. Gruß
-
Moin Moin, vielen Dank für eure Ideen. Ich werde mir die Gegebenheiten noch mal anschauen und vielleicht passt ja was, oder ich kann etwas abwandeln. Der Hub beträgt etwa +/- 50mm. Bei 0 ist der Zylinder jeweils zur Hälfte ausgefahren und der Tisch in Waage. Wie lichtanfällig ist das Line-Bricklet, weil am Einsatzort meist deutliche Lichteinwirkung vorherrschen. Deswegen ist auch das Distansbricklet rausgefallen. Das Hall-Bricklet müsste ja auch gehen, wenn ich an einem Stab einen Magnet an entsprechender Stelle vorbei führe, oder? Gruß
-
Danke für die schnellen Antworten. Das hab ich mir schon fast gedacht. In diesem Fall eignet sich das Tilt also nicht, da der Tisch sich richtiger Weise noch nicht in der Waage befindet. IMU wäre die beste Lösung, jedoch fällt diese wegen der Kosten in diesem Fall raus. Wollte eigentlich einfache Seilzugpotis über die AnalogIn Bricklet anschließen, finde jedoch keine passenden. Die Rotary Bricklets hatte ich auch erst im Blick, um daraus eine Art Poti zu bauen. Diese passen leider wegen Ihrer Auflösung nicht. Für Denkanstöße bin ich sehr dankbar!
-
Hallo, mich würde interessieren ob es möglich ist mit dem Tilt Bricklet eine Ebene wieder in die Waagerechte zu bekommen. In der Mitte der Ebene sitz ein Kardangelenk, die Ebene wird mit zwei kleinen Hydraulikzylindern bewegt. Es handelt sich dabei um den hydraulischen Demonstrator, welcher automatisch wieder in Ausgangsposition verfahren werden soll. Hab mir überlegt das zwei Tilt Bricklets dafür geeignet währen. Er müsste ja erkennen, dass die jeweilige Achse geneigt ist und solange die entsprechende Achse bewegen bis der Neigungsschalter im Tilt geschlossen ist. Ist meine Überlegung richtig bzw. gibt es schon jemanden der seine Erfahrungen teilen kann? Grüße BorgelMorgel
-
Hallo TF, gibt es schon einen Zeitplan für das Blinkenlights-Kit sowie eine preisliche Orientierung? Hab bei github geschaut und bin sehr gespannt erste Bilde zu sehen un d da ich schon 50Pixel habe würde das meine Anwendung gut erweitern Grüße
-
Wenn es um Schutz der Strips geht, dann wäre evtl. auch einer mit IP65 Cover gut. Unter folgendem Link gibt es welche mit passendem IC. http://www.hackerspaceshop.com/ledstrips/ws2801-strip-32-leds-meter-epoxy.html# Je nach Anwendung kann dies ja auch geeignet sein. Vielleicht kann TF sowas auch mit in den Shop aufnehmen und dafür der Quälerei mit dem Schlauch ein Ende setzen.
-
Also bei dem MAX! System ist der Cube nicht zwingend erforderlich, sondern dient der Programmierung der Schaltzeiten bzw. dem Zugriff über lokales Netz oder Internet. Es steigert also den Komfort. Bei deinem angestrebten System willst du also nur steuern, die Temp vom Raum erfassen und dann wieder steuern, um zum Beispiel abzustellen oder so. In diesem Fall würdest du nur eine Richtung benötigen, da deine Abfrage ja über weitere TF Module erfolgt. Da man aber aus dem Heizungsthermostat (am Heizkörper) oder von einem Raumfühler die Werte bekommt wäre ein Rückkanal natürlich sinnvoller und man spart sich die extra Messung in jedem Raum. Diese müsste ja wieder Verkabelt/Vernetzt werden. Stelle ich mit logistisch schon schwierig vor, da nicht jeder die Wände aufschlitzen kann, um Kabel zu verlegen. Des Weiteren sind da einige Systeme kostengünstig auf dem Markt. Die Lösung für das tägliche manuelle Schalten der Ventile ist ja schon Homatic und Co., denn genau diese Systeme werden einmal Programmiert und schalten dann nach Zeitplan oder halt nach Temp im Raum. Ich sehe die Notwendigkeit in einem Einrichtungssystem nicht, zu mal ja trotzdem die Temp erfasst werden soll und muss, um die Anlage zu regeln.
-
Was willst du denn mit den Heizungsthermostaten machen, sie nur auslesen oder auch steuern? Ich habe das MAX! System von eq-3, welche ebenfalls die 868MHz Frequenz nutzt. Diese werden über den Cube ausgelesen und gesteuert. Somit brauch ich doch eine Sende- und Empfangsfunktion im Funkmodul, oder verwechsle ich hier was. Sonst macht die Heimautomatisierung ja keinen Sinn.
-
Ich habe den Link zum geplanten Prozessor studiert und gesehen das bei Connectivity ein CAN-Bus aufgeführt ist (A10 only). Wir es dann möglich sein das auch zu nutzen bei den Varianten? Ist es evtl. geplant das es ein CAN-Bricklet geben wird? Wir nutzen die TF Module viel und sind richtig zufrieden. Da es aber meist Fahrzeuganwendungen sind, wäre CAN wirklich eine schöne Ergänzung die vieles vereinfacht.
-
Genau für so eine Anwendung sind dann die Streifen wieder besser Vorteil ist auch das ich auf kleinen Raum viele Pixel/LEDs plaziert bekomme und damit, wie im Video zu sehen, sogar ganze Displays aufbauen kann. Mir ist es aber ein Rätsel wie die das mit der Videosignal Wiedergabe machen, ist sicher ein heiden Aufwand in der Programmierung. Wenn das aber mal steht, ist das auf jeden Fall extrem genial Was hast du genau vor, willst du so ein Display aufbauen? Bei den Pixeln mit mehreren LEDs muss man glaube noch eine Kühlung vorsehen. Die einfachen gehen ohne und auch Streifen sind bedenkenlos. Diese Highpower LED aber nicht, laufen ja auch mit 12V und verbrauchen bis zu 120mA, bei voller Helligkeit.
-
HAb gerade noch gesehen das die auch Pixel mit vier RGB LEDs haben und sogar mit WS2801 Treiber
-
Also für eine derartige Anwendung sind die Pixel besser geeignet, da man sie einfach flexibler verbauen kann. http://shop.pixelinvaders.ch/product/pixelinvaders-diy-basic-pack Unter dem Link gibt es ein Panel, welches auch aus Pixeln besteht. Die Bauform ist etwas anders und es sind drei LED pro Chip, nicht wegen Kosten sondern um eine größere Fläche auszuleuchten und mehr Helligkeit zu erreichen. Diese drei LED bilden ein RGB Pixel. Die haben aber auch die Pixel, welche TF anbietet. Aber generell würde ich auf auf Pixel setzten, da ich mir das mit den Streifen nicht richtig vorstellen kann wie man das verlegen will. Es sei denn du willst eine Laufleiste bauen, die 10m lang ist und nur 30cm Hoch. Weiß schon jemand, was das Blinkenlight Kit bewirken soll und aus was es besteht?