BorgelMorgel
Members
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von BorgelMorgel
-
Super, danke! Da war ich ja schon auf dem richtigen Weg mit meinem Ansatz.
-
Ok, das in der Doku hatte ich auch gefunden. Der Schritt ist ja notwendig um auf DD.DDDDD° zu gelangen. Also wenn es keine Möglichkeit gibt, werde ich wohl eine Berechnung durchführen. Vielen Dank für die schnellen Antworten.
-
Hallo, ich arbeite gerade mit dem GPS Bricklet und stehe vor dem Problem, dass die ausgegebenen Koordinaten im falschen Format vorliegen. Statt DD.DDDDDD° brauch ich DD°MM.MMMM' für weitere Bearbeitungsschritte. Eine Umstellung in der API hab ich nicht gefunden, im Viewer ist es ja möglich. Hab mir auch die Berechnung rausgesucht, wollte aber gern wissen ob es eine andere Möglichkeit gibt oder ich in der API evtl. etwas übersehen/lesen habe. Die Koordinaten werden dann zusammen mit einigen anderen Messwerten gespeichert. Eine nachträgliche Umwandlung möchte ich nach Möglichkeit vermeiden. Grüße
-
Hallo Bebu, also ich hatte ja einen hydraulischen Demonstrator gebaut, welcher bei öffentlichen Veranstaltungen an unserer Einrichtung von Besuchern genutzt werden kann. Dort wird mikro-Hydraulik mit TF Elementen gesteuert. Zum einen wird das DC-Brick genutzt um die Pumpe und den damit geförderten Volumenstrom zu Steuern. Dabei schwankt die Motordrehzahl und damit auch der Strom am DC-Brick, was thermische Schwankungen verursacht. Das Servo-Brick bedient zwei Servos, welche die Ventile öffnen oder schließen. Gesteuert wird über einen Joystick. Gerade bei Besuchern handelt es sich immer um Härtetests, weil viele Leute da nicht zimperlich mit umgehen. Wir hatten den Demonstrator vor kurzem im 8 Stunden Dauereinsatz, da waren kaum Pausen und die Elektronik lief ununterbrochen. Ich war wirklich völlig zufrieden, weil alles ohne Ausfall durchgehalten hat und auch jetzt noch so weiter genutzt werden kann. Sicher ist die Umgebung etwas sauberer als in einer Werkhalle, aber wenn man die Elemente etwas schützt und etwas Frischluft zuführt ist das alles kein Problem. Wenn du schon konkrete Vorstellungen hast, wie du eure Maschinen automatisieren möchtest wäre ich auch neugierig.
-
Platz zwei ist so hoch, weil so viele mit dem Raspberry Pi die Seite besuchen. Ich war mit meinem vorgestern hier unterwegs und habe mich bei der Debatte gefragt, wozu der eigentlich zählt. Darum war ich dann auf "wie ist meine ip" wo ja bekanntlich das OS mit angezeigt wird. Zu meinem Erstaunen wird der da als MacOS X mit Safari 5 angezeigt. Leute die einen haben, könnten das ja mal bitte Probieren, um herauszufinden ob das bei mir nur ein Fehler ist oder der generell falsch erkannt wird.
-
Sehr schönes Projekt, wenn der dann fertig ist bau ich den auf mein selbstentworfenes Rasenmäherfahrgestell und lass ihn über die Wiese sausen Wo möchtest du die weiteren Ultraschall Sesnoren anbringen bzw. wieso benötigst du noch weitere? Wieso ist ein so großer Entfernungsbereich notwendig, wie schnell fährt der Rover?
-
Am häufigsten Windows 7, zudem eine VM mit der aktuellen Ubuntu Version sowie Scientific. Laptop mit Ubuntu 10.04LTS hauptsächlich für TF. Leider ist meine Ubuntuplatte im Desktoprechner hin, darum bin ich dort zurzeit wirklich nur mit Windows unterwegs. Demnächst kommt noch ein PI, vermutlich mit Debian. Die Beweggründe sind verschieden. Windows hauptsächlich wegen bestimmter Anwendungen und weil es historisch so gewachsen ist. Linux in den letzten Jahren zunehmend um Windowseinsatz zu reduzieren ^^
-
Also als Messnadel würde ich zwei beschichtete Edelstahlstäbe nehmen. Die halten definitiv viel mehr aus und Korrodieren nicht sofort. Das Material ist allerdings auch nicht so billig, aber man spart ja weil man nicht so oft neue bauen/kaufen muss.
-
Mit welcher Software macht ihr die CAD Zeichnungen vom Zusammenbau?
-
Ich hatte damals als ich mit der Gestaltung der Gehäuse für die einzelnen Bricks begonnen hatte auch die Idee mit einer Hutschienenhalterung. Diese sollte entweder gleich dran oder ansetzbar sein. Ich hatte das schon mal angefangen zu gestalten, für eine 15mm Hutschiene auf, auf welche die WAGO-Klemmen passen. Ich kann dir das ja mal raussuchen, aber ist halt nichts von der Stange.
-
@dergeberl Könntest du mal bitte deine Motoren preisgeben, die du gewählt hast? Bin auch auf der Suche nach brauchbaren, bezahlbaren klein/kleinst-Motoren. Danke
-
Habe an einem IO16 etwa 9,75m angeschlossen die zu einem Taste führen. Sind normal isolierte Kapel die ich noch verdrillt habe. Bis jetzt konnte ich keinerlei Probleme feststellen.
-
Zerlegen ist nicht. Das muss im ganzen transportiert werden. Sprich ein Würfel vom 1m x 1m x1,20m. Kommen aus Dresden, das wären gute 375km.
-
Hi, das wäre denke ich akzeptabel. Bis wann braucht ihr einen Bescheid? Bei uns wird es mit dem Trasport halt problematisch und der Entfernung. Ich hoffe das ich diese Woche fertig werde mit dem Aufbau und endlich mal testen kann. Gruß
-
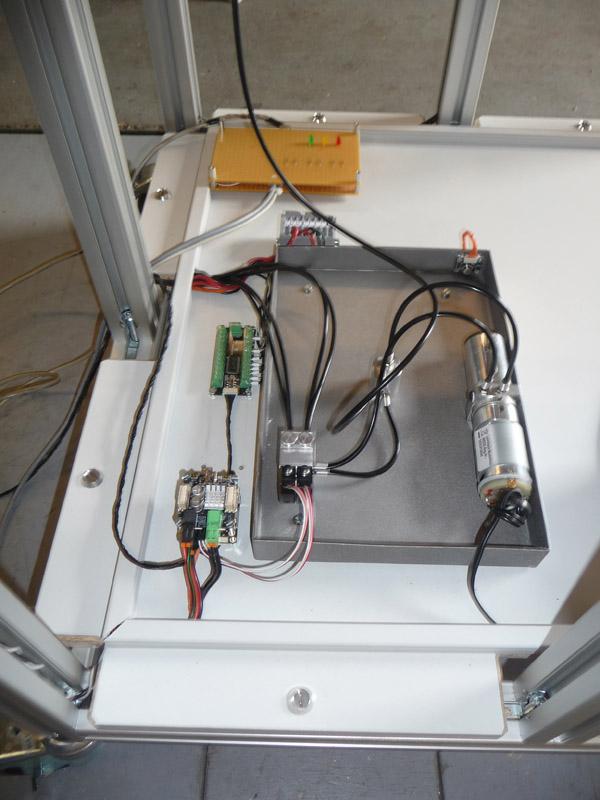
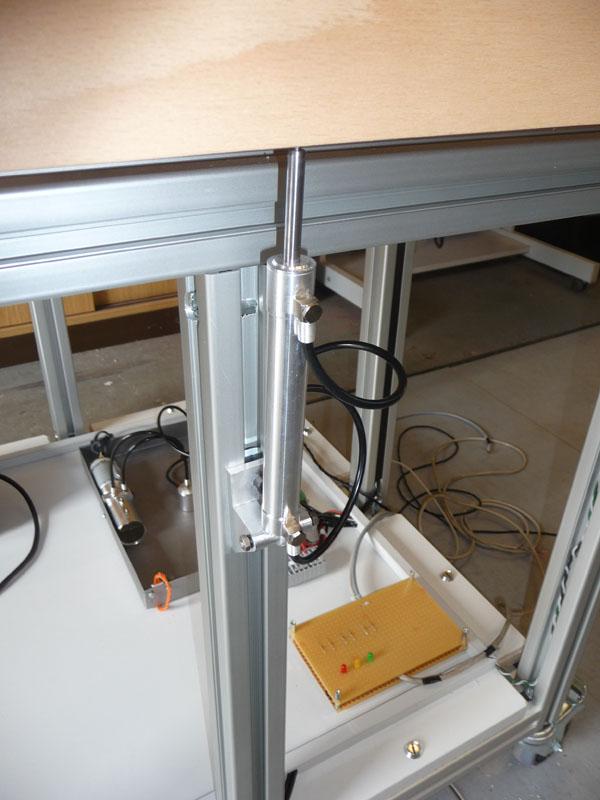
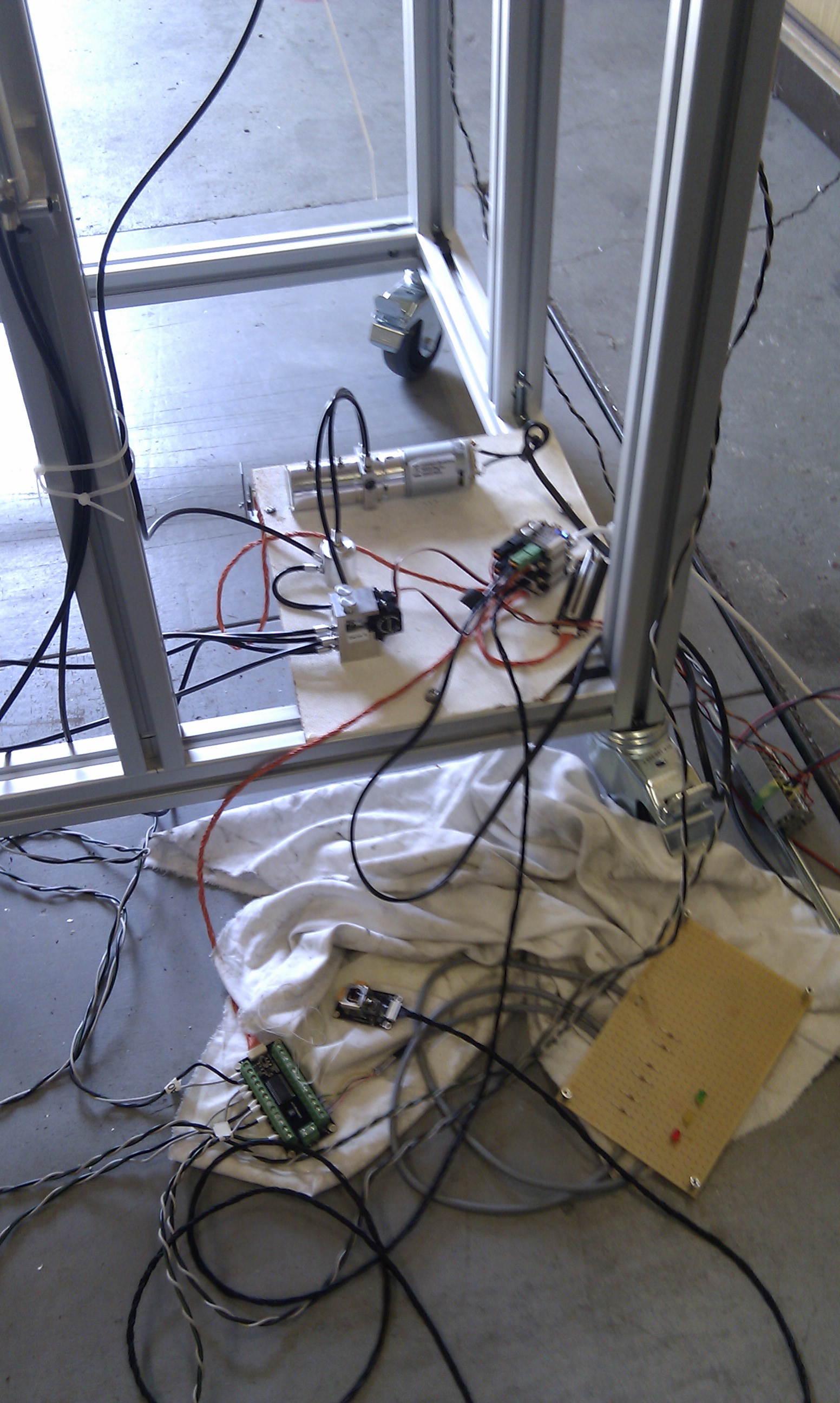
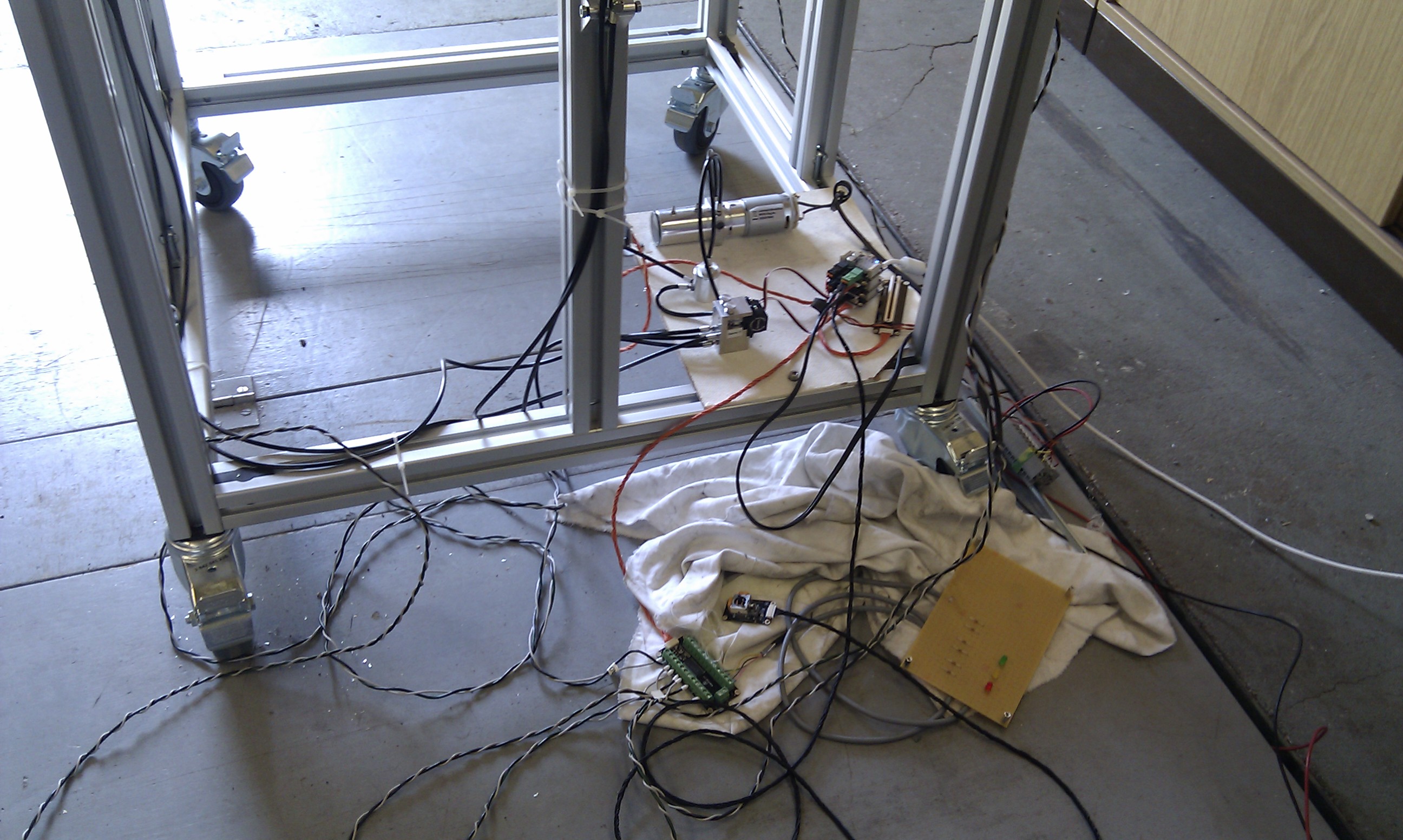
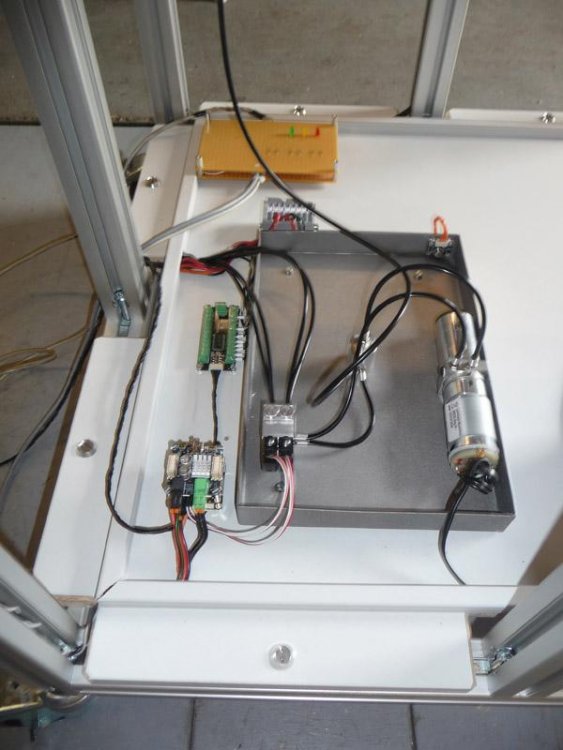
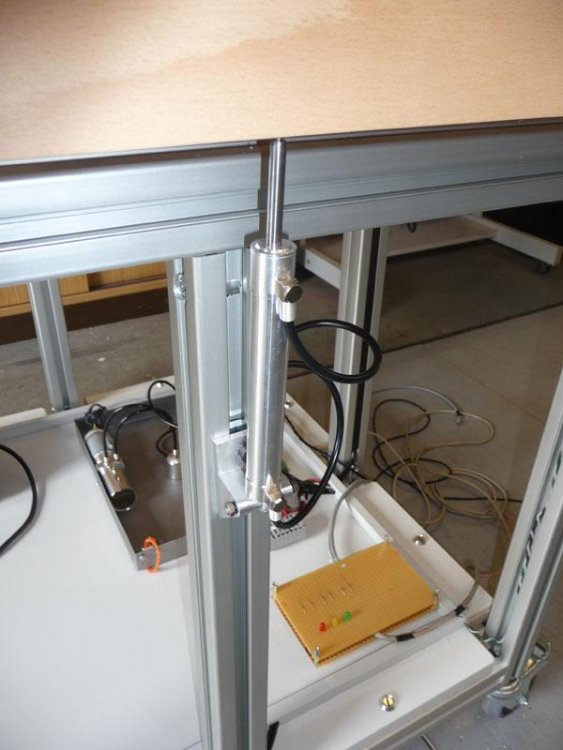
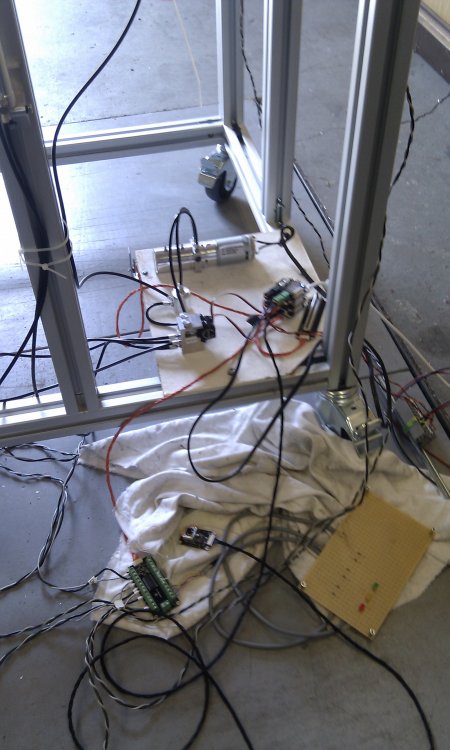
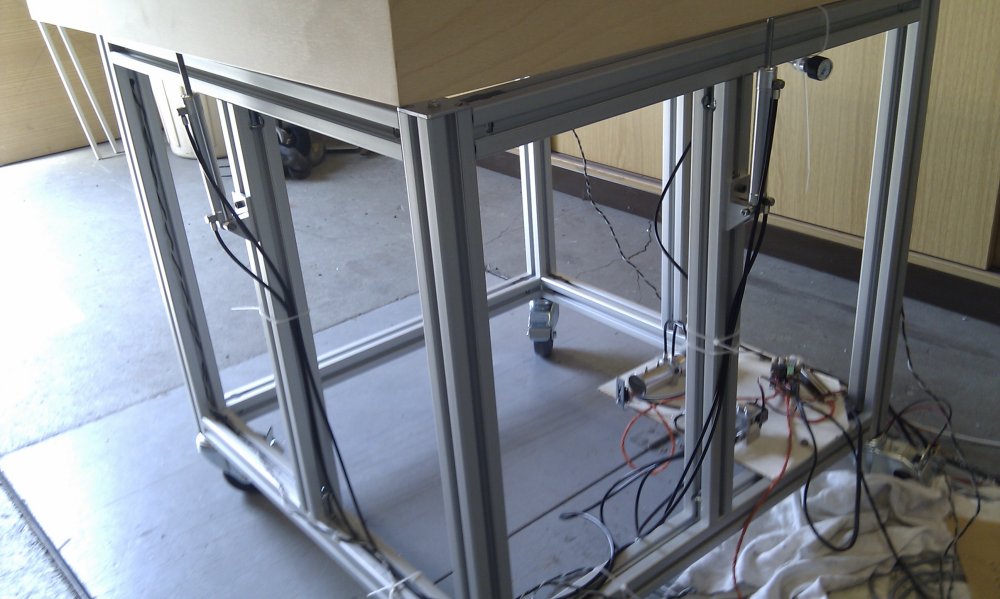
So, hier jetzt die versprochenen Bilder vom aktuellen Stand der Dinge. Der Rechner ist noch nicht drin und die Stromversorgung noch nicht angeschlossen. Die liegende Platine wird noch festgemacht und geht dann ans IO und das Bedienelement. Wir fertigen gerade einen Kasten aus Plexiglas, der dann über die Hydraulik und Elektrik kommt. Dort wird die Platine befestigt und ein Lüfter integriert. So kann niemand direkt reingreifen, aber man kann alles schön sehen. Gibt es hier Erfahrungen mit dem DC Brick und dessen thermischen Verhalten bei Dauerlast? Werde den Motor wohl mit einer Geschwindigkeit von 25K laufen lassen und bei den Kurztests ist der Kühlkörper schon recht heiß geworden. Ich werde zwar einen Lüfter direkt darüber anbringen, würde dennoch gern wissen ob das reicht. Nicht das sich hier nach einer Stunde was entzündet. :'(


-
Hallo batti, also Interesse hätte ich/wir schon. Bis wann muss das Spruchreif sein und wie soll das ablaufen? Da wir noch keine richtigen Test durchgeführt haben bin ich noch vorsichtig mit einer direkten Zusage, nicht das dann etwas nicht funktioniert und ihr steht ohne was da. Vielleicht schriebst du einfach noch ein paar Infos in den Maker Faire Trade. Das Ziel des kleinen Demonstrators ist ja einfache hydraulische Elemente spielent zu begreifen, wobei auch die Steuerung und Regelung eine wichtige Rolle spielt. Ich werde auch noch mal mit meinem Kollegen sprechen.
-
Momentan sind wir in der Endmontage, aktuelle Bilder folgen hoffentlich am ende der Woche. Es ist soweit alles verkabelt und auf einer neuen Bodenplatte plaziert. Das Labyrinth ist ebenfalls in arbeit, allerdings sind wir da von unserer Tischlerei abhängig die uns das Material besorgt. Deshalb konnten wir auch noch keinen endgültigen Test durchführen. Habe jetzt fast alle Ports am IO16 im Einsatz. Im Bedienelement werden jetzt noch vier LED geschalten die über eine Thyristorschaltung anfangen zu blinken wenn der entsprechende Endlagentaster ausgelöst wird. Bei uns muss er auf jedenfall bis 05.07. fertig werden, denn dann hat er seinen ersten öffentlichen Einsatz.
-
Das IO16 sollte zur schaltung der LED völlig ausreichen. Da du 18 hast müsstest du noch ein 4IO mitnehmen. Ich schalte damit ebenfalls einfache Diodenschaltungen und da man ja sowieso einen Vorwiderstand braucht reicht das völlig aus. Den Power Supply bräuchtest du auch, oder du schließst ein kleines Netzteil mit ausreichend Leistung an die StepperBricks. Vielleicht kannst du ja noch paar Angaben zu den Schrittmotoren und den LEDs machen, die bei dir zur Anwendung kommen.
-
Also der Anschluss an den Servo-Brick sollte eigentlich recht einfach gehen und kann eigentlich auch nicht falsch gemacht werden. Die Servos haben ja so einen speziellen Stecker und der passt nur in einer Richtung. Bei der Ausgangsspannung, also die die der Servo bekommt sollte man sich schon an die Angaben im Datenblatt oder auf dem Servo halten. Meine laufen zum Beispiel mit 4,8V. Wenn ein Servo permanent mit mehr Spannung betrieben wird, kann das unter Umständen zum Servoschaden führen. Gleiches ist, wenn er permanent gegen einen Widerstand arbeitet (Servo sort die ganze Zeit). Das sieht man auch im Brickv, denn es wird ein Strom angegeben.
-
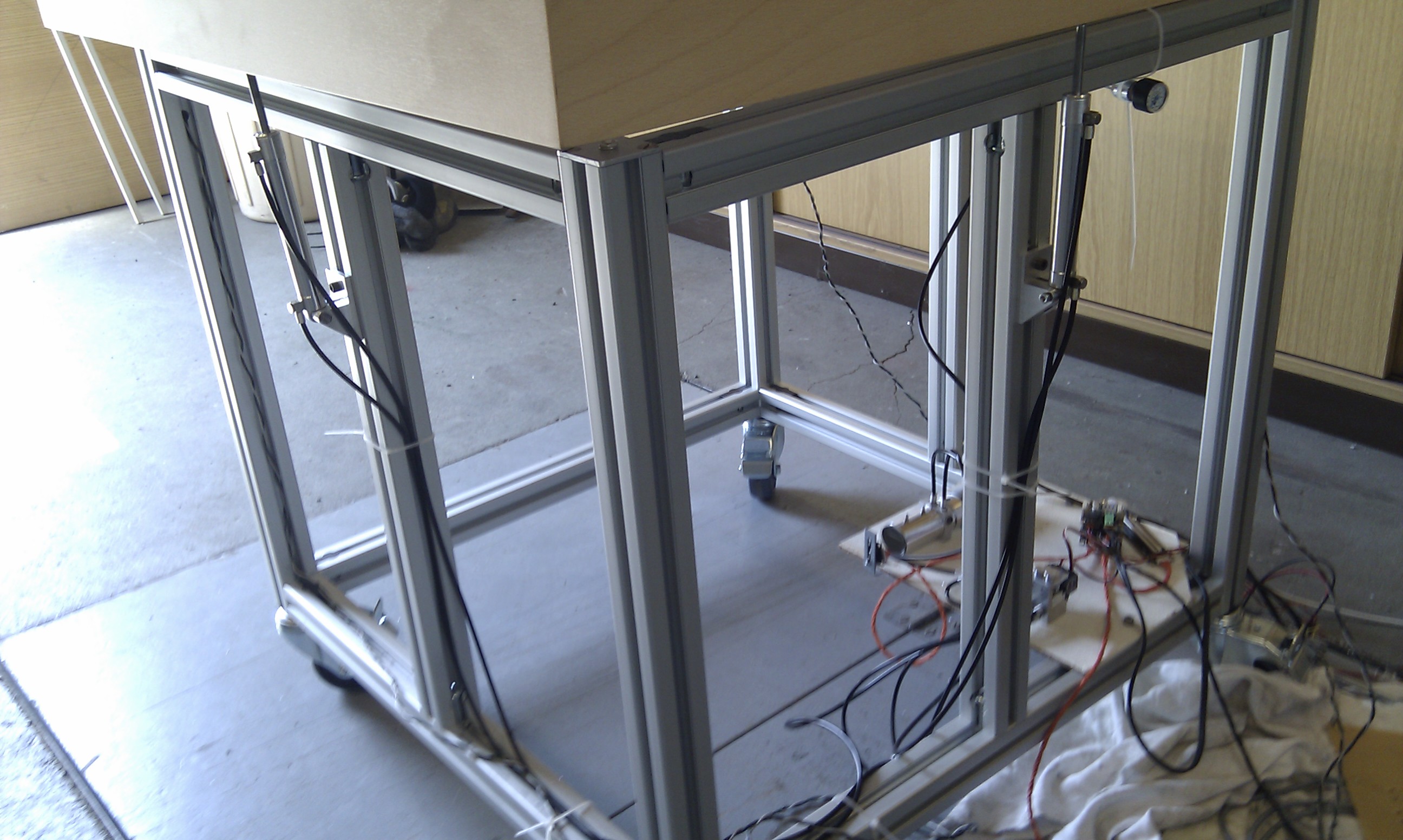
Vor einiger Zeit hab ich mein Projekt ja schon mal angeschnitten, nun werde ich es mal richtig vorstellen. Für eine jährliche Veranstaltung, bei der wir vorallem technische Aspekte der breiten Masse näher bringen wollen, haben wir uns einen kleinen Demonstrator ausgedacht. Sicher ist das Prinzip nichts neues, aber er ist direkt auf unsere Anforderungen ausgerichtet. Dabei handelt es sich um einen kleinen (800x800)mm Tisch auf Rollen, welcher aus zwei Teilen besteht, dem Ober- und dem Unterkasten. Beide sind über ein Kardangelenk beweglich miteinander verbunden. Der Oberkasten kann sich somit drei Dimensional bewegen. An zwei Seiten ist der Ober- und Unterkasten zudem mit kleinen Hydraulikzylindern verbunden, welche die eigentliche Bewegung dieser Ebene ermöglicht. Im Oberkasten wir später ein Labyrinth platziert werden, durch das eine Kugel geführt werden muss. Im Grunde handelt es sich um einen großen Murmeltisch, ähnlich dieser kleinen Spiele die es früher häufiger gab. Im Unterkasten steckt alles was wir für die Realisierung der Bewegungen brauchen. Eine kleine Konstantpumpe mit DC Motor liefert den erforderlichen Volumenstrom für die beiden Aktoren. Geregelt wird dieser Volumenstrom über ein Proportionalventil, deren Position über mit zwei kleinen Servos verändert wird. Zwischen Pumpe und Ventil ist noch ein Filterelement platziert. Nun zur Tinkerforge-Einheit, welche ich mit der Stückliste beginnen möchte. 1x Master 1.1 1x Servo 1.0 1x DC 1.0 1x IO16 1.1 1x TempIR 1.1 1x Linear Poti 1.1 1x Joystick 1.2 Kabel und Befestigungskits An den DC-Brick ist der Pumpenmotor angeschlossen, deren Geschwindigkeit noch über das Linear Poti geregelt wird. Später soll die Geschwindigkeit des Motors Situationsabhängig sein. Der Servo-Brick bestimmt die Position des Proportionalventils (2 Servos). Master bildet logischer Weise die Grundlage für den Stapel. Über das TempIR-Bricklet erfasse ich die Temperatur des Hydrauliköls im Tank. Die Werte werden ausgewertet und über das IO16-Bricklet an eine Temperaturampel weitergeleitet. Das sind drei LEDs, denen ich einen Temperaturbereich zugeordnet habe (Sicherheit). Langzeitversuche haben wir leider noch nicht, darum ist noch unbekannt wie sich die Temperatur des Fluides während des Betriebs entwickelt. Ebenfalls am IO16-Bricklet sind vier Taster angeschlossen, welche die Endlage des Oberkastens erfassen. Ein Taster ist jeweils an einer Ecke angebracht und löst bei Betätigung durch den Oberkasten das Ereignis am IO aus. Die Software sperrt dann diese Bewegungsrichtung und Schäden zu vermeiden. Gesteuert wird das ganze über den Joystick (oben, unten, rechts, links und die Diagonalen). Das Programm läuft auf einem alten Notebook (OS Ubuntu 10.04LTS) und ist in Python geschrieben. Zudem ist noch ein Netzteil im Unterkasten enthalten, welches das DC und Servo Brick versorgt. Vernetzung erfolgt über 15mm Hutschiene mit Wagoklemmen. Hab noch paar Bilder angehangen, leider nur befriedigende Qualität. Da sich aber alles noch im Aufbau befindet reiche ich ordentliche Bilder nach.


-
Hallo thunderbird, mir ist bei deinen Wetterdaten deiner Wetterstation "Wesel-Lackhausen" aufgefallen das der Min/Max Temperaturwert des Tages nicht stimmt. Weiß nicht ob es schon jemand gemeldet hat, oder es dir selbst aufgefallen ist. Der zeig +/- 95°C an. Grüße
-
Ich baue gerade einen hydraulischen Demonstrator für unsere Einrichtung, welcher mit TF bestückt ist. Ich bin gerade am Testen und Dokumentieren. Ich stelle das mal in unserer Runde vor, die Entscheidung liegt aber nicht bei mir. Ich hoffe das ich bis nächste Woche mal den Projekteintrag hinbekomme. Dann könnt ihr ja auch sehen ob sich das eignet.
-
Der Wiki-Eintrag wurde auch aktualisiert.
-
Im Anhang nun die CAD Daten für den Inventor 2012, wie von andreas301 gewünscht. Bei dem Gehäuse hab ich Toleranzen von 0,5mm bedacht. Beim Boden und Deckel nicht, da die Streuung zwischen den Bricks sehr groß ist. Dort bitte eigenständig nachmessen und anpassen. Mittlerweile sehe ich jedoch nur wenig Sinn darin für jeden Brick bzw. für jede Stapelart ein Gehäuse zu konzipieren. Bei den Versuchen mit dem DC/Stepper Brick muss viel mehr Freiraum wegen der Belüftung berücksichtigt werden, als es zum Beispiel beim Servo oder Master der Fall ist. Deshalb sind die im Stapel nicht vereinheitlich bar. Die Schichtbauweise, mit PMMV, denke ich ist praktikabler. Gehäuse aus dem 3D-Drucker nur für konkrete Anwendungen, bei denen man z. B. Halterungen oder dergleichen mit einbeziehen kann. Gern verwirkliche ich andere Ideen, wenn ihr noch welche habt Brick_40x40_Stepper_Gehaeuse_Ver_2.ipt Deckel_Gehaese_Ver_2.ipt Boden_Gehaese_Ver_2.ipt
-
So, im Anhang sind alle drei Versionen als STEP, also zwei mal Stecker und die Buchse. Hoffe es nützt was. Falls andere Formate doch besser wären, bitte melden. Platine_zu_Platine_Buchse_4.85.stp Platine_zu_Platine_Stecker_6.35.stp Platine_zu_Platine_Stecker_9.35.stp