BorgelMorgel
Members
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von BorgelMorgel
-
Hallo Zero213, schau mal hier: http://www.mechapro.de/shop/Schrittmotoren:::21.html?XTCsid=0mv8uovf5t00cecmpm6cks1fv7 Die haben einige Schrittmotoren, die deinen gewünschten Spezifikationen entsprechen. Wenn du eine Fräse bauen willst, solltest du die Achsenantriebe auch bei geringem Kraftbedarf wenigstens einmal übersetzen. Gut geht das mit einem Riemen, welcher reist oder abspringt, wenn sich der Fräskopf z. B. verkantet. Das ist nicht so schlimm wie wenn der Motor drauf geht, oder deine Elektronik. Passende Riemenräder und Riemen gibt es z. B. bei Conrad & Co. Welche größe soll deine Fräse haben? Ist es eine Portalfräse und welche Anforderung stellst du an die Genauigkeit im Fertigungsprozess?
-
Jep, das ist Richtig. Gibt es hier Erfahrung oder Empfählungen welche Servos gut sind? Vorallem bei denen Preis/Leistung stimmt, falls man viele verwenden möchte.
-
@ThomasKl Du meinst bestimmt die normalen Servos, wie sie im Modellbau eingesetzt werden. Denn richtige Servomotoren sind deutlich teurer als Schrittmotoren!
-
Du solltest auch bedenken das du keine galvanisch Trennung in deiner Kette hast, welche bei Schrittmotoretreiberbausteinen sonst über einen Optokoppler gewährleistet wird. Bei Fehlfunktion oder zu großer Belastung kannst du da auch viel Schaden machen. Kleine Anwendungen sollten aber problemlos umsetzbar sein. Wie Nic schon richtig gesagt hat, ist es ratsam eine Übersetzung an den Motor zu bauen. Einfach und effektiv ist das über eine Riemengetriebe realisierbar. Die Scheiben und Riemen sind sehr günstig zu bekommen. Du kannst damit das Drehmoment vergrößern, was gerade bei CNC-Fräsen notwendig ist.
-
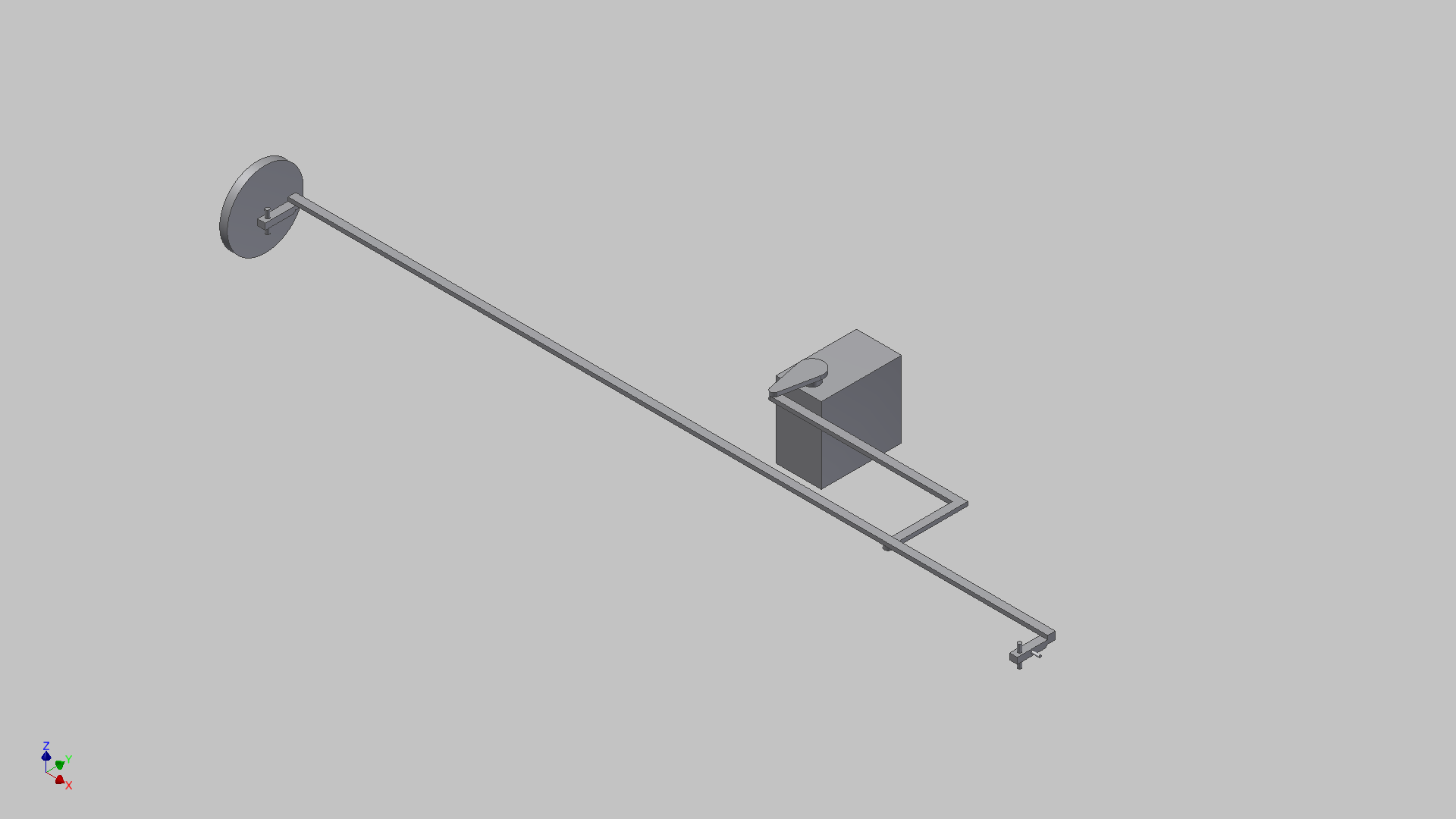
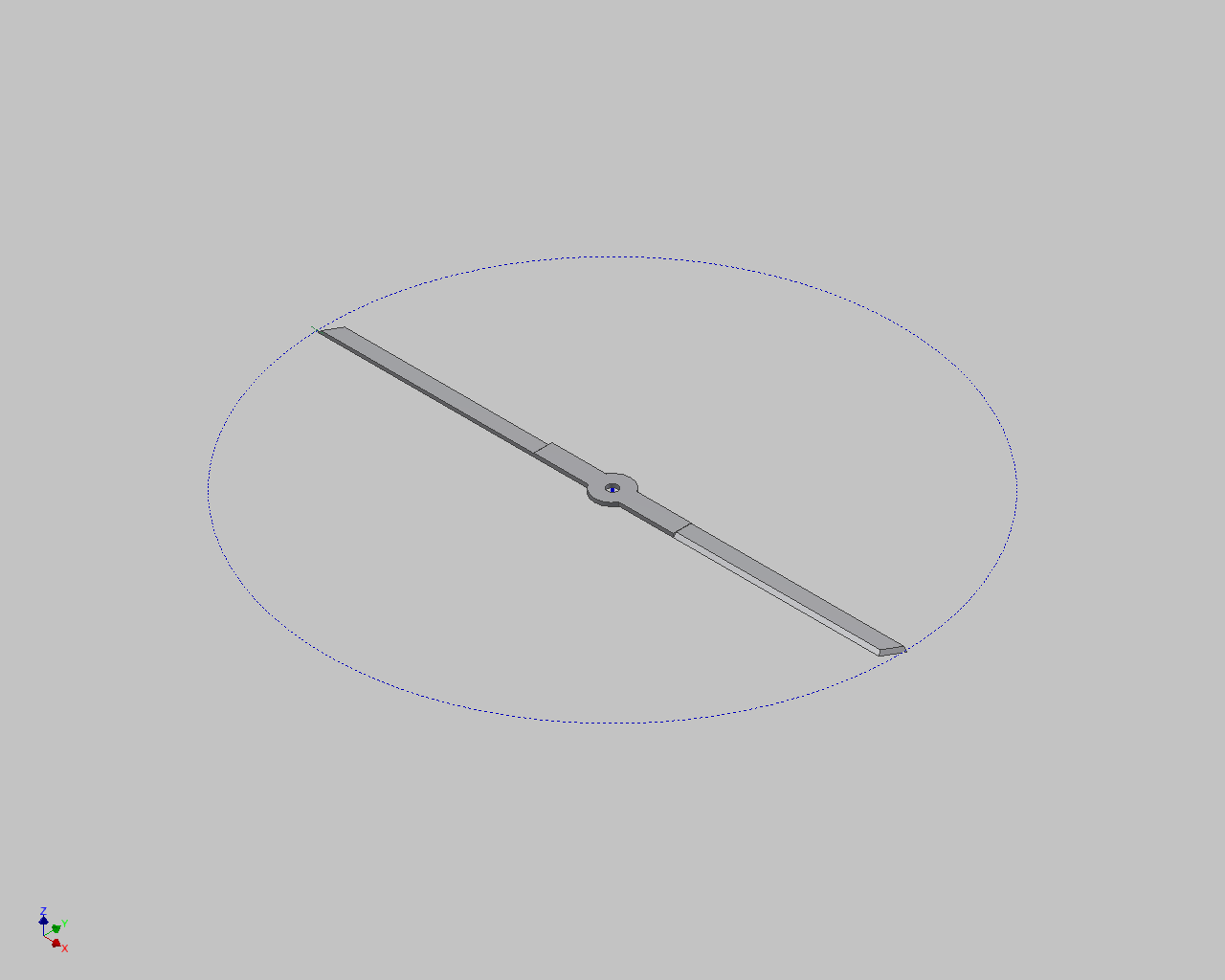
Hi, bedien dich einfach bei vorhandenen Modellfahrzeugen und bau dir ein kleines Lenkgestänge. Ich hab mal schnell ein sehr einfaches CAD Modell gebaut, welches die grobe Richtung darstellt. Diese Teile sind im Modellbau in vielen Größen schon vorhanden. Dein Bild war leider etwas unscharf, sodass ich die Lenkaufnahme und die Lenkstange nur erahnen konnte. Bei Conrad un Co gibt es sowas aber definitiv als Kits oder Ersatzteile.
-
Hier gibt es vielleicht auch geeignete LED Treiberbausteine: http://ledsee.com/index.php?page=shop.product_details&flypage=flypage.tpl&product_id=150&category_id=12&option=com_virtuemart&Itemid=27&vmcchk=1&Itemid=27
-
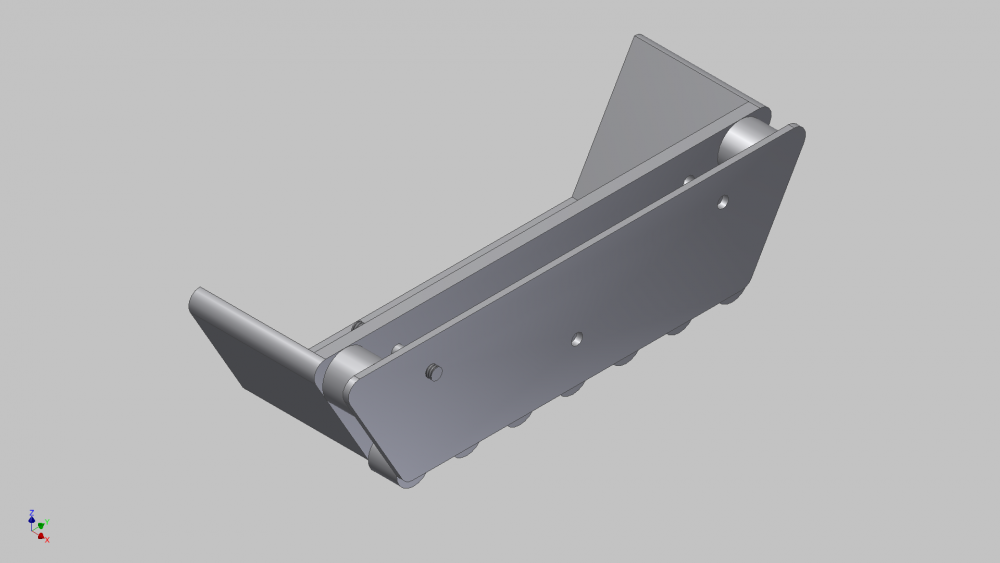
@euman Du könntest doch eine dünne Platte über Gewindestifte an die äußere Seite des Kettenlaufwerkes anbauen. Den Abstand zwischen Laufrollen und der Platte kannst du ja über Hülsen regulieren. Wenn der Abstand klein genug ist, sodass nichts schleift, kann die Kette eigentlich nicht mehr abspringen. Die Platten können ja aus Holz oder Plaste sein. Bild dazu im Anhang! Solche Laufwerksschutzplatten gab es im Zweiten Weltkrieg auch, hatten aber dort eine andere Funktion. Der deutsche Panzer IV hatte sowas.
-
Je nach Verfahren ergibt sich ein ganz spezielles Schnittmuster. Das klassische Rotationsmähprinziep, mit dem Messer an der Unterseite, ist einfach umzusetzen, aber eine Ecke kann man damit aber nur mühsam mähen. Die anderen Verfahren sind natürlich aufwendiger, bieten aber gerade im Punkto Schnittmuster mehr Möglichkeiten.
-
Hallo, für LEDs gibt es doch geeignete Vorsteuer- bzw. Vorschaltgeräte die den passenden Strom und die passende Spannung ausgeben. Kann natürlich sein das du dann für die einzelnen LED-Paare verschiedene brauchst. Dort kommen dann schon konstante Werte raus. Eine Automatisierung ist von den gestellten Aufgaben abhängig. Problem ist ja, dass du dann immer einen Rechner daneben haben musst welcher die Bricks steuert. Besser bedient wärst du glaube mit einer kleinen industrie Automatisierung, wie zum Beispiel der Siemens LOGO! die es schon zu humanen Preisen gibt. Dort hast du Relais die geschaltet werden können, oder Analog In/Out über Erweiterungsmodule, sowie Netzteile. Der Vorteil ist das du einen interne Logik anlegen kannst, welche im Gerät gespeichert wird und automatisch abläuft. Das ist denke ich eher geeignet. Du kannst dort auch verschiedene Sensoren anschließen, deren Signale dann verarbeitet werden und eine entsprechende Reaktion auslösen. Zum Beispiel Licht ein/aus abhängig von der Zeit oder Heizung ein/aus abhängig von einem Temperaturwert eines Sensors usw.
-
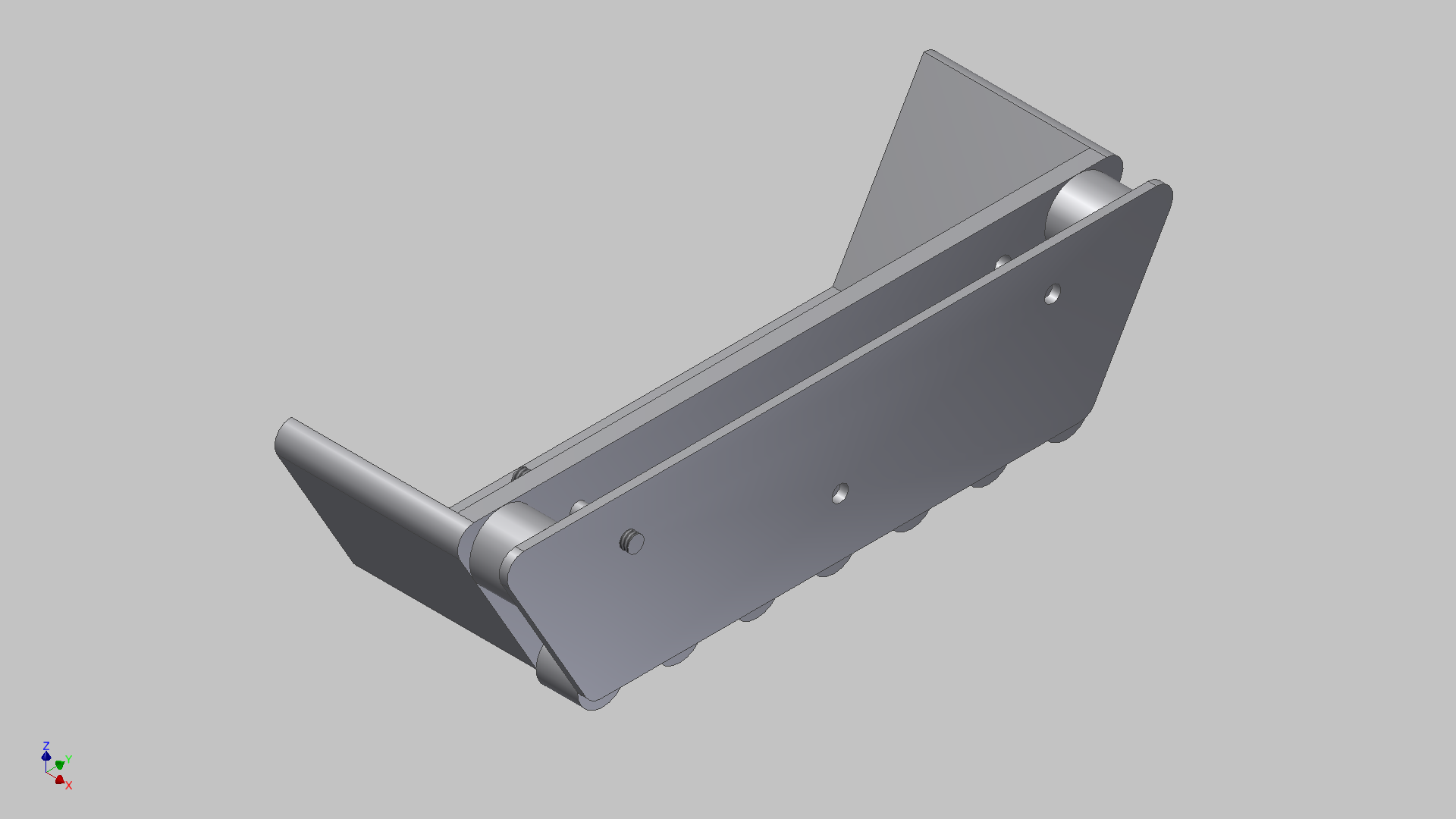
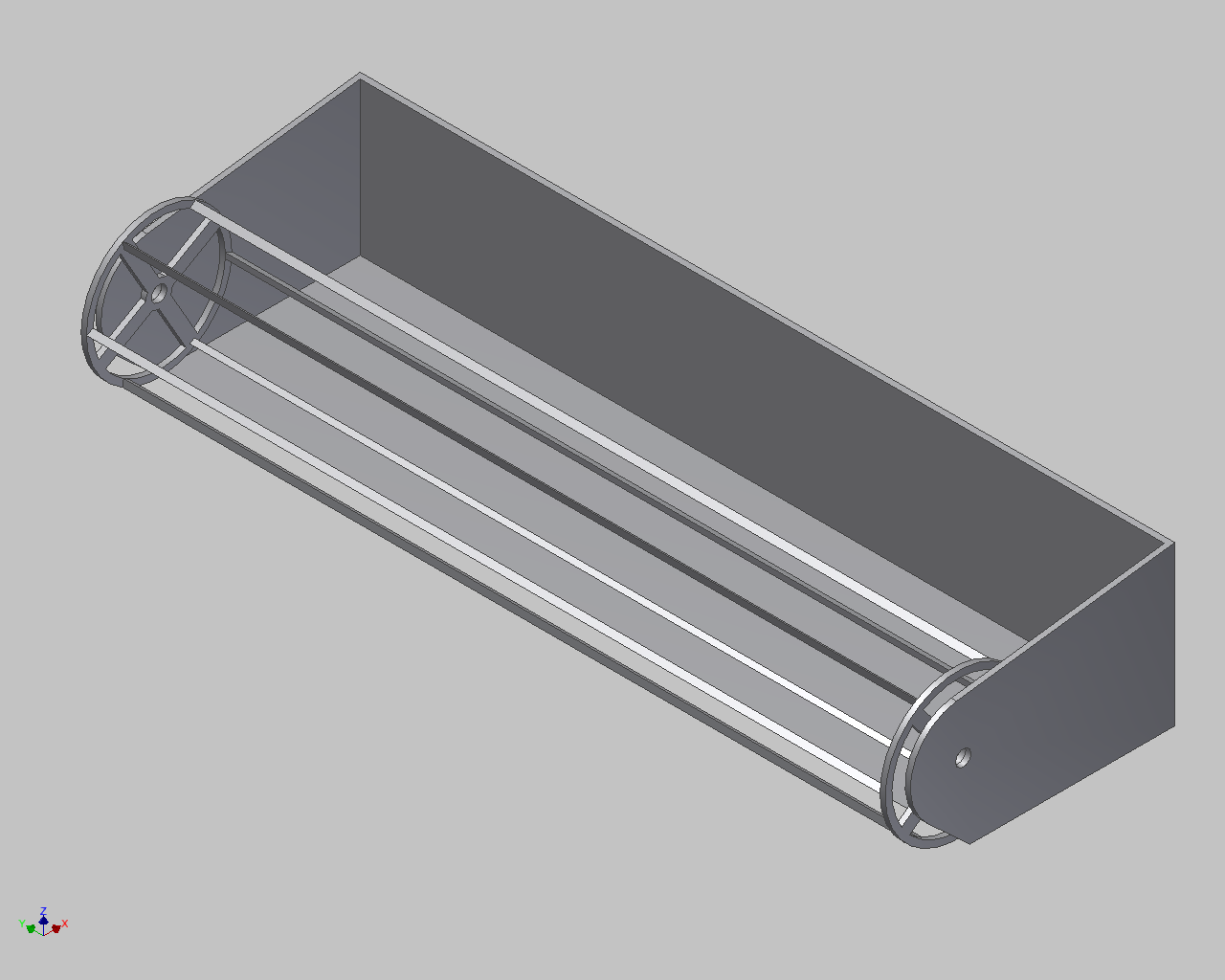
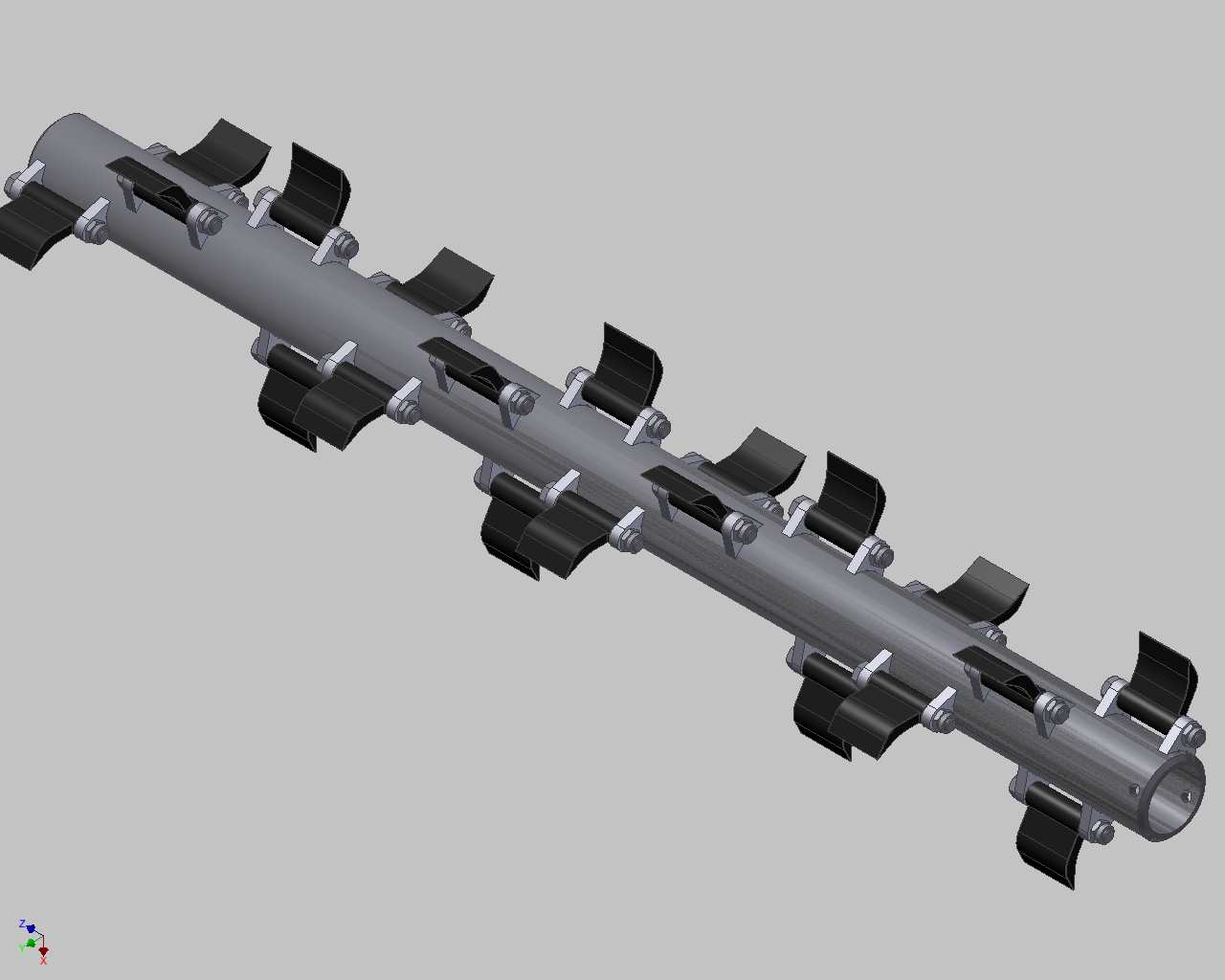
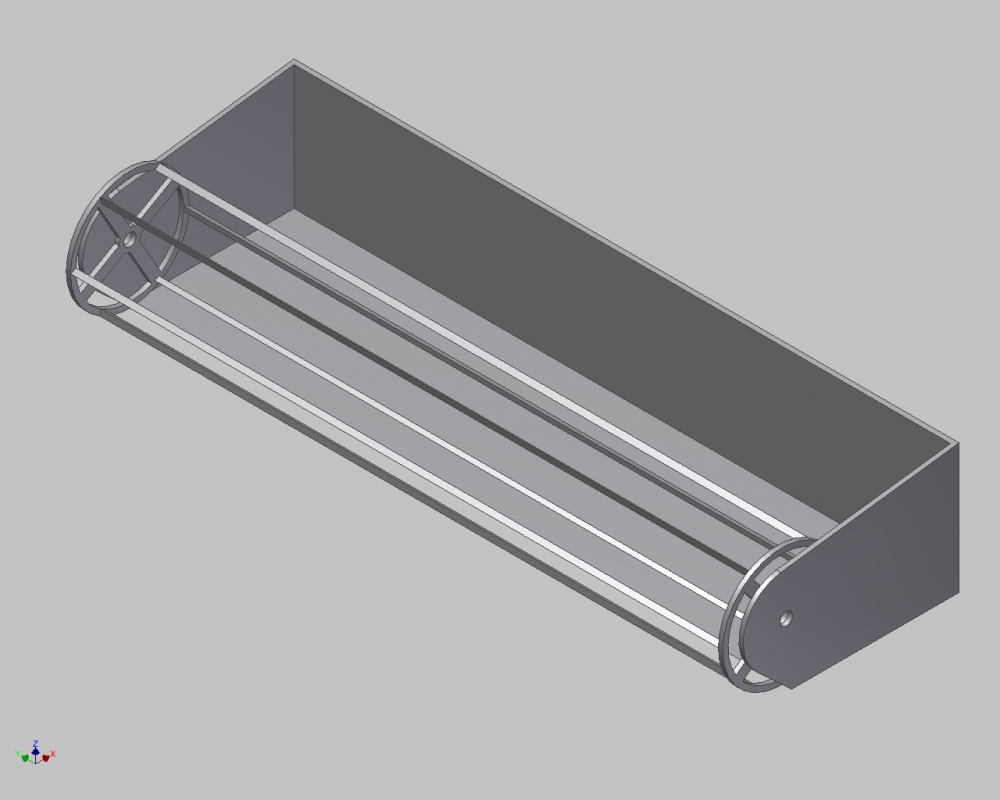
Mir ist noch ein weiteres gängiges Prinzip eingefallen, welches von vielen rein mechanisch angetriebenen Rasenmähern verwendet wird. Dies könnte man auch sehr einfach adaptieren. Es ähnelt dem der Mähdrescher, jedoch ohne Schlägel. Hierbei rotiert eine Trommel und schert das Gras an einer feststehenden Unterkante ab. Bild ist im Anhang. So könnte man einen Minimähdrescher bauen. Je nach Verfahren gibt es Vor- und Nachteile. Vorallem muss man sich überlegen ob man noch einen Auffangkorb dran baut oder mit dem Rechnen hinterher rennt. Auch möglich ist eine Art Mulscher, der das Schnittgut so klein macht und gleichmäßig auf der gemähten Fläche verteilt, sodass es verrottet und dem Rasen als Dünger diehnt. Bei Liegewiesen ist das natürlich ein bissel blöd. Vielleicht komm ich mal dazu ein paar Konzepte zu entwickeln, welche ich dann hier vorstelle. Wenn das Ganze mechanische geklärt ist, kann man sich an die autonome Steuerung machen. Erstmal reicht ja auch eine Vernbedienung.
-
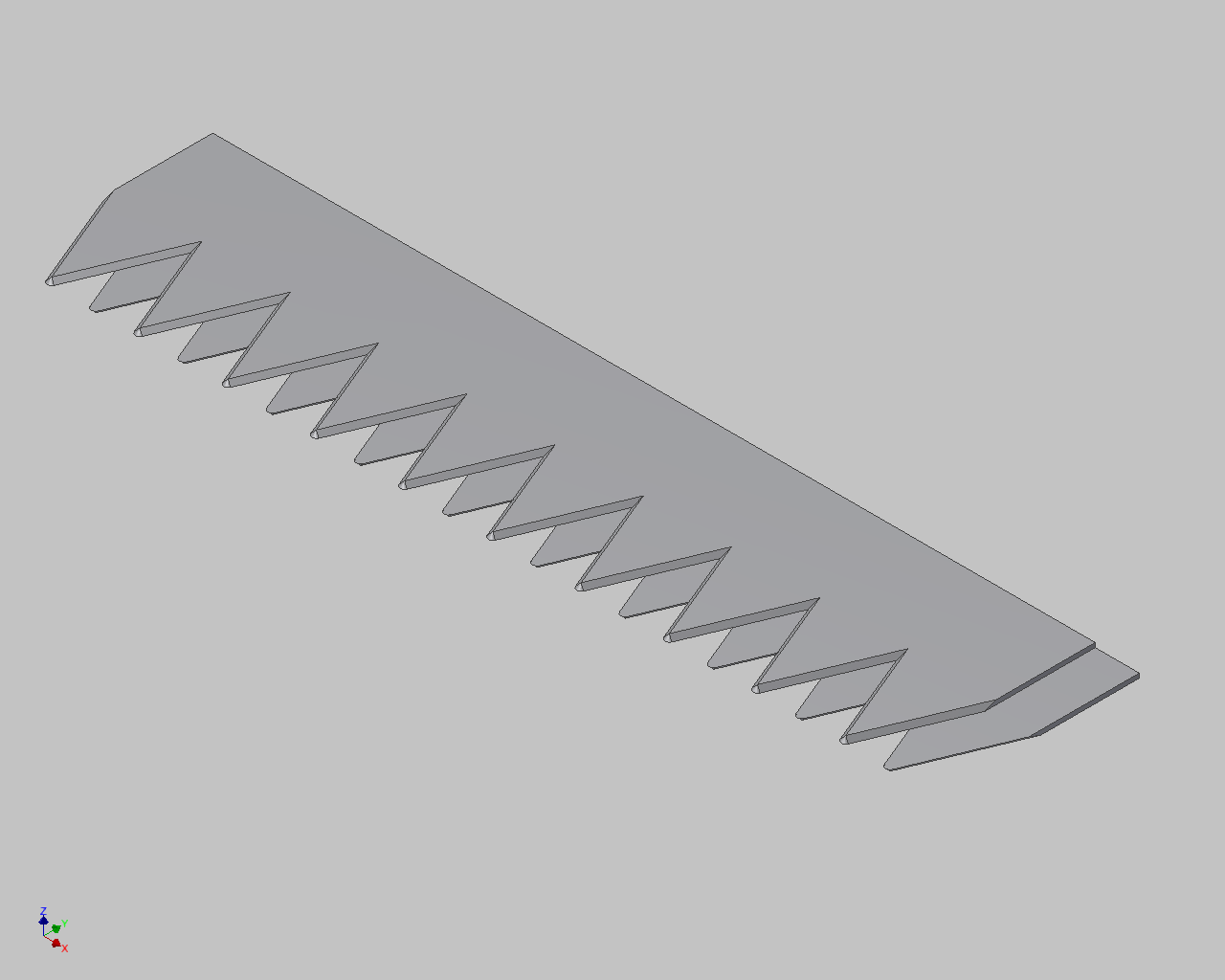
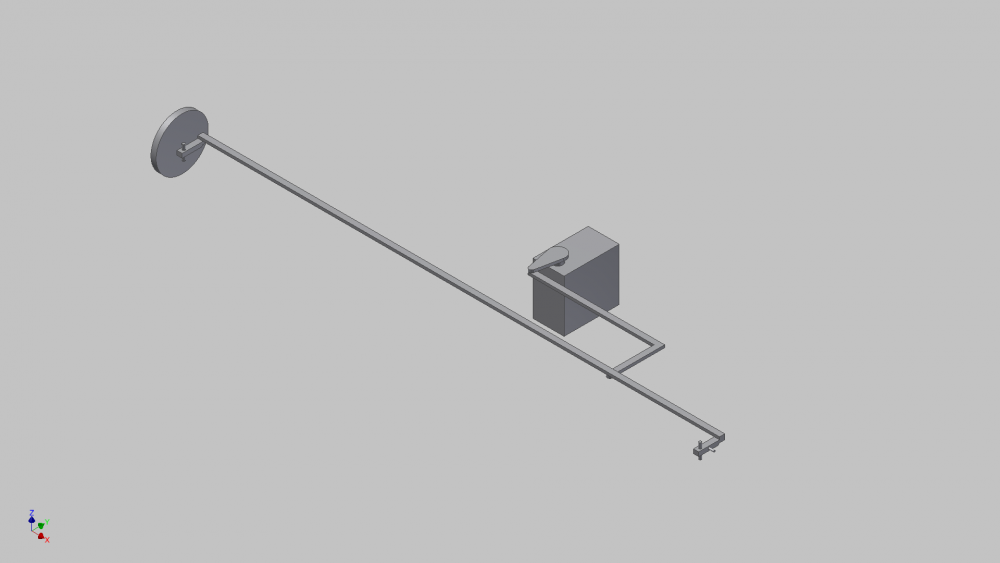
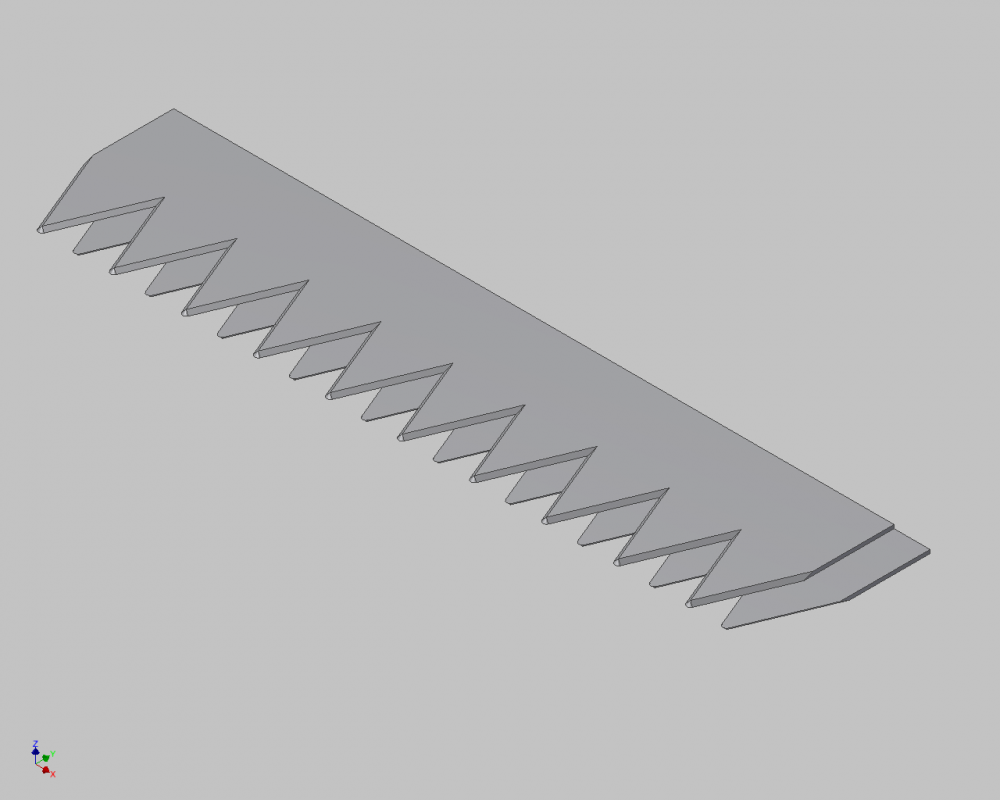
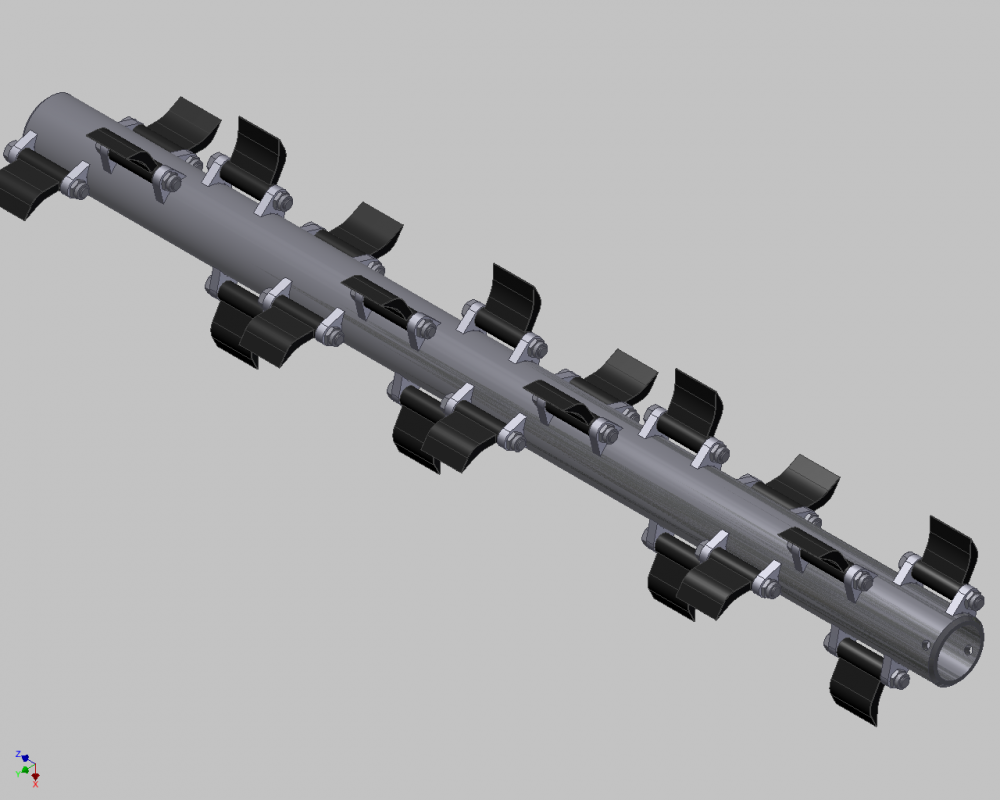
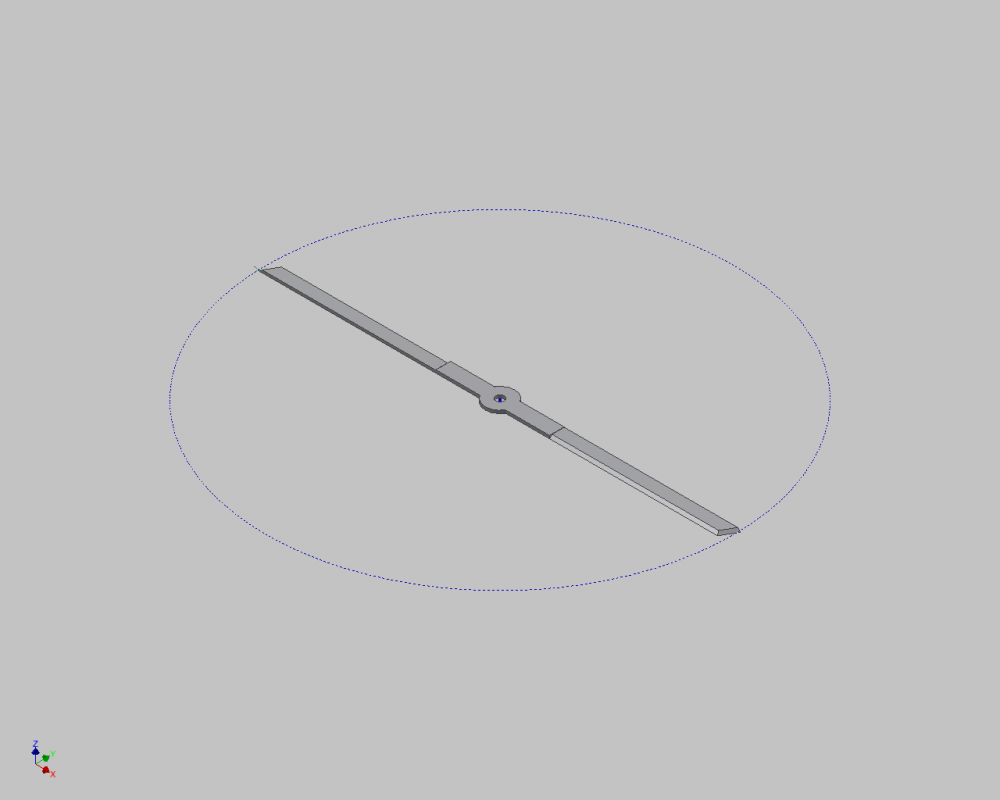
Hallo, auf dem Gebiet der Rasenbekämpfung kenne ich mich Arbeitsbedingt nun etwas aus. Die Idee mit dem autonomen Rasenroboter find ich gut und lässt sich bestimmt auch mit TF umsetzten. Ich würde auch zuerst einen Gedanken an eine geeignete Mähtechnik verschwenden. Ich habe mal die drei häufigsten Verfahren zusammengefasst. Es gibt das klassische Rotationsmähprinzip, bei dem ein oder mehrere Messer rotierend über den Untergrund geführt werden. Je nach Messergröße muss natürlich genug Platz vorhanden sein, dafür brauch man aber meist nur eine geringe Antriebsleistung. Das ist das herkömmliche Prinzip wie es auf bei Hausrasenmähern oder -traktoren zur Anwendung kommt. Ein Weiteres Verfahren ist das Balkenmähen, bei dem zwei oder mehrere Messer aufeinander gleiten, wobei das unterste feststeht. Durch die markante Geometrie der Messer wird in den Zwischenräumen das Gras abgeschert. Konstruktiv ist das sehr aufwendig, aber machbar. Als Antrieb kann ein Motor mit montierter Unwucht dienen, welcher eines der Messer hin und her bewegt. Eine weitere Möglichkeit ist ein Schlägelmähwerk. Dabei wird eine Welle angetrieben auf der verteilt Schlägelmesser angeordnet sind. Durch die Zentripetalkraft stellen sich die einzelnen Messer auf und trennen das Gras ab. Dieses Verfahren kommt vorwiegend bei Randstreifenmähern zum Einsatz. Die Schnitthöhe kann je nach Anordnung der Messer bei allen Verfahren variieren. Das sollten die häufigsten Verfahren sein, zuden ich noch je ein Bilder im Anhang bereitgestellt habe. Je nach Verfahren muss dann über eine geeignete Trägerplatform nachgedacht werden. Dabei haben Ketten-,Halbketten- oder Reifenfahrwerke verschiedene Vor- und Nachteile. Das Mähen über einen Ausleger würde ich vermeiden, da enorme Schwingungen auftreten, der Rasen nie eben ist und sich das Messer so eingräbt und der Antireb deutlich aufwendiger ist. Das Eingraben der Messer könnte man über eine sogenannte Schwimmstellung vermeiden, ist aber sehr aufwendig. Zur Positionsbestimmung: Das ist so eine Sache, ich würde auch erst einmal mit festen Algorithmen arbeiten. Also fahre 2m gerade, dann 90° nach rechts usw. GPS ist aufgrund der geringen Positionsänderung nicht geeignet. Es gibt auch Peilverfahren, bei denen sich das Fahrzeug in einem Raster bewegt was mit festen Stationen abgesteckt ist. Das müssen natürlich mindestens drei sein, besser mehr. Durch den permanenten Kontakt mit den Basen weis der Mäher dann immer wo er ist und das je nach Technik auf den Millimeter genau.
-
Vielen Dank, werde ich gleich mal ausprobieren
-
Wäre es möglich das auch für die 2010 Version bereit zu stellen?
-
CAD Datein zu den ganzen Elementen wären eine feine Sache, vorallem bei Anwendungen die Bauraumabhängig sind. Das Erstellen sollte kein Problem sein. Selbst wenn sich einer mit den ganzen Teilen hinsetzt und diese vermisst, um sie dann in ein CAD Programm zu überträgt. Dabei ist die Frage ob man für jede Software die passende Datei anbietet, oder ob man die Elemente in einem für die meisten Programme verständlichen Format bereitstellt (wie zum Beispiel .STEP). Bei uns kommen zum Beispiel SolidEdge, SolidWorks, CATIA und Autodesk Inventor zum Einsatz. Für Linux gibt es übrigens auch ganz brauchbare Programme die kostenlos sind. Es ist immer die Frage wie der Anwender ein Projekt aufbaut. Ich Plane zum Beispiel fast alles was konstruiert werden muss in entsprecheneden CAD Anwendungen, gerade um etwahige Probleme schon vorher zu erkennen und auszumerzen. Ich kann nur immer wieder darauf hinweisen das sich TF`s Bauteile nicht nur im Hobbybereich eignen. Vondaher wären CAD-Datein für viele Anwender bestimmt Gold wert.
-
Der Versand über DHL ist eine gute Entscheidung. Auch gut ist das der Versand jetzt etwas billiger ist.
-
Dein Beispiel sieht doch schon praktisch aus und hat bestimmt schon Mühe gemacht! An die einzelnen Elemente müssen dann halt Eingänge und Ausgänge. Über DK auf das jeweilige Element kann sich ja dann ein Fenster öffen wo man Grundparameter eingibt, oder man steuert sie mit über dafür vorgesehene Eingänge. Des Weiteren müsste die Oberfläche Anzeigeelemente und Elemente zur weiterverarbeitung besitzen z. B. "In/aus Datei speichern/lesen", Rechen- und Logikoperatoren. Der Punkt 6 von borgs Post ist sehr interessant und wäre ne coole Sache.
-
Ich denke auch das Blöcke im Stil von VISIO & Co. gut geeignet wären. Auf der einen Seite die Inputs und auf der anderen die Outputs. Eventuell könnte man die Blöcke ja auch noch drehen um die Anschlüsse oben und unten zu haben. Bei den Verbindungen müsste man sicherlich einige unterschiedliche nehmen (gestrichelt usw.) oder man unterscheidet sie mit verschiedenen Farben. Vielleicht regt der folgende Link ja ein wenig an: https://www.circuitlab.com/editor/ Ich bin zwar beim programmieren nicht unbelastet, könnte dort aber vermutlich nicht sehr viel helfen. Wenn es um graphische Elemente geht sieht das schon besser aus.
-
Ich favorisiere immer noch eine direkte Einbindung in LabVIEW. Dies hätte gerade in Bereichen an Lehreinrichtungen, welche sonst wenig mit Programmieren zu tun haben, viele Vorteile und würde TinkerForge auch für diese Bereiche sehr interessant machen. Zudem ist LabVIEW im Bereich der Forschung und Lehre ohne hin an den Einrichtungen vorhanden (meist auch Matlab) und auch in der Industrie ist es sehr viel anzutreffen. Für private Anwendungen ist es meist zu teuer, darum dort eher seltener. Mit einer solchen Einbindung, könnte sich die Hardware auch in Industrie, Lehre und Forschung etablieren ohne tiefgehende Programmierkenntnisse voraus zu setzen!
-
Wie aufwendig ist es aus dem bestehenden Code eine DLL für LabVIEW zu generieren? Das müsste ja dann für jedes Brick und Bricklet gemacht werden, so das man einzelne Bausteine bilden kann.
-
Weil der Begriff LabVIEW gefallen ist. Ist es geplant Bausteine zu erstellen mit denen die Bricks ausgelesen und gesteuert werden können? Das wäre ne feine Sache da so auch industrielle/ forschungs Bereich diese dann unkompliziert nutzen könnten.
-
Aha, ist das Problem auch bei sogenannten Spannungsreglern gegeben. Diese gibt es in verschiedenen Ausführungen, auch regelbar. Nachteil ist, dass dieses Bauelement deutlich teurer als Widerstände sind.
-
Man könnte doch alle mit 7V speisen (1 Servo-Brick) und bei denen die weniger bekommen sollen einen Widerstand in die Versorgung packen, oder gibt es da Probleme?!