BorgelMorgel
Members
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von BorgelMorgel
-
Jep, ich mach ne STEP und stell es rein.
-
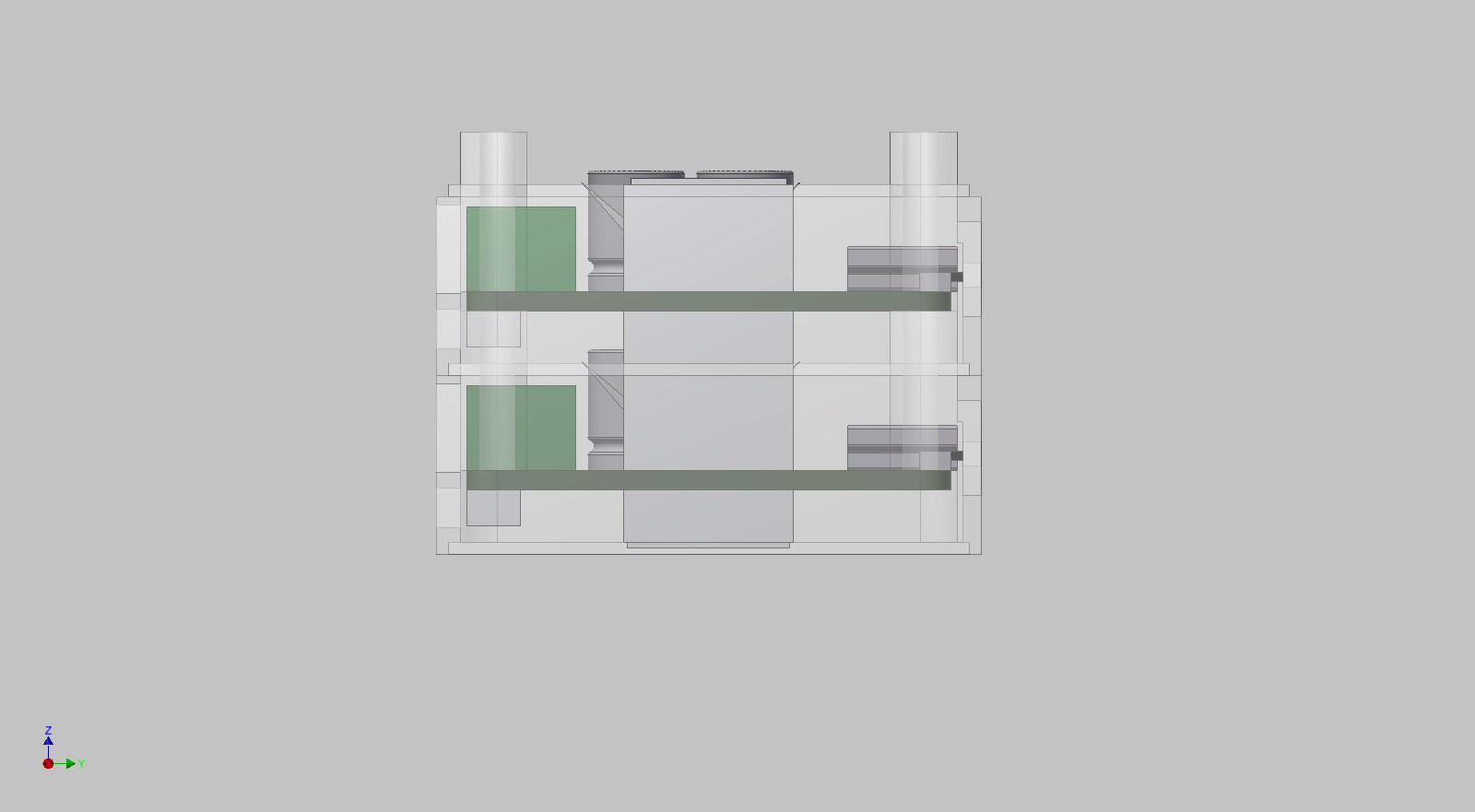
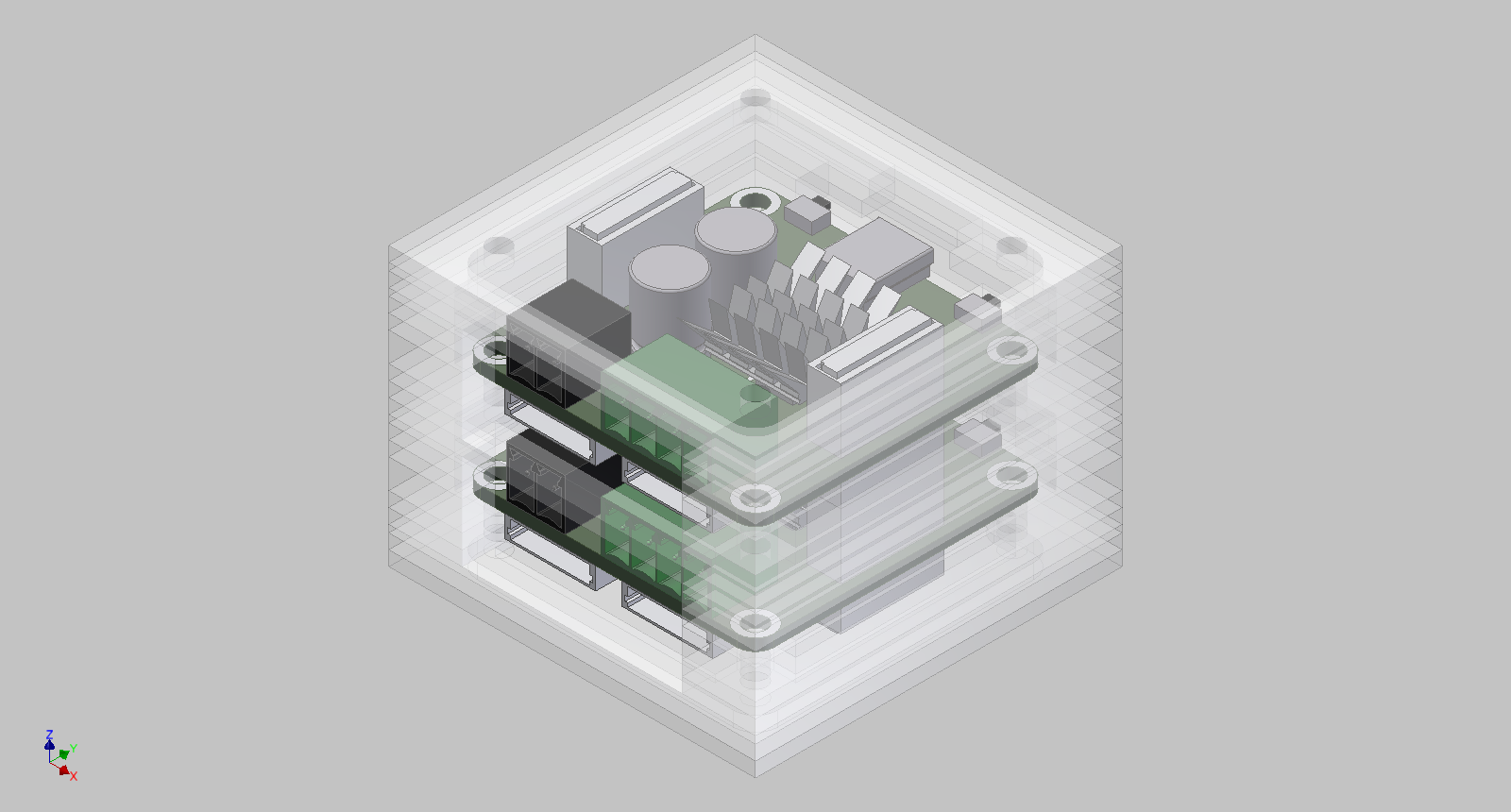
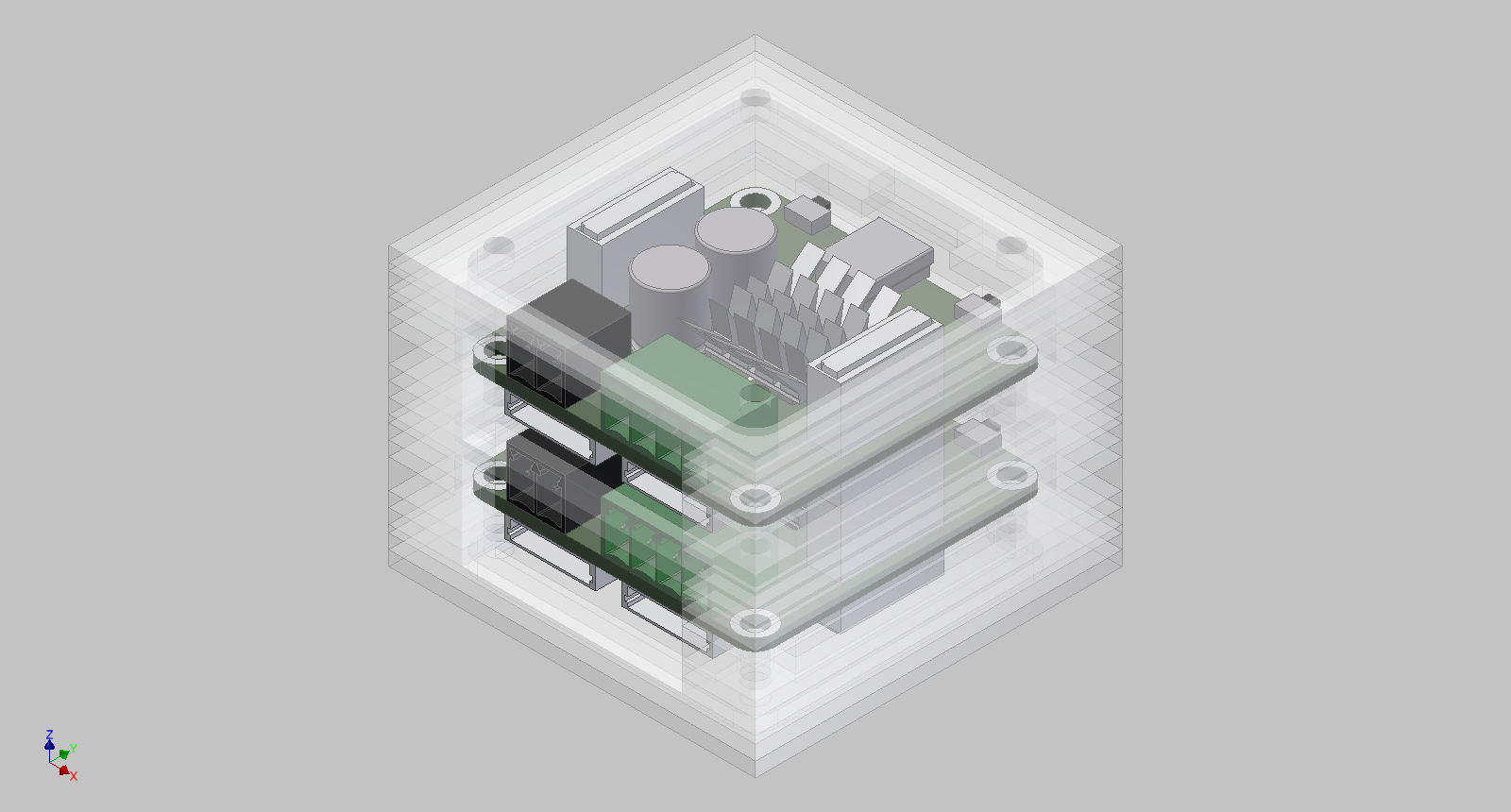
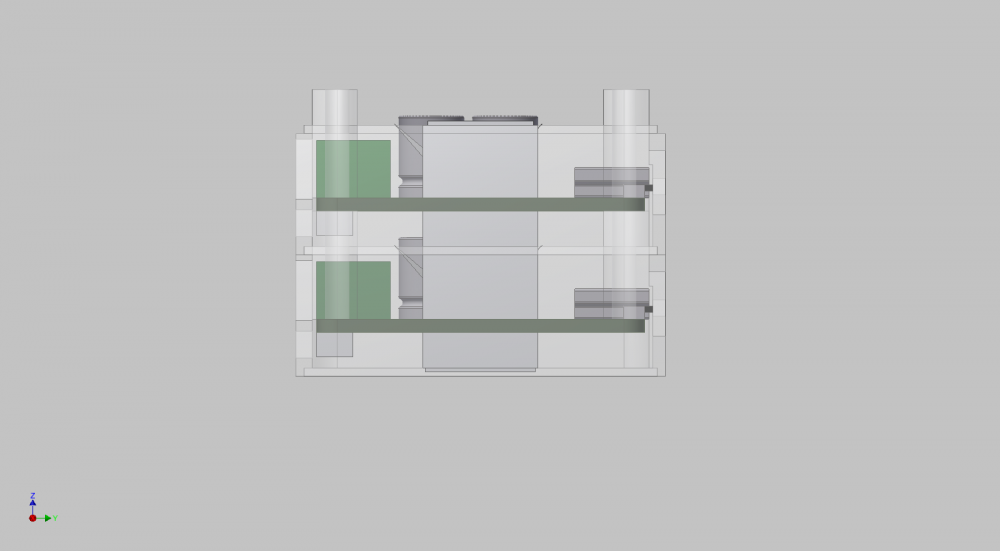
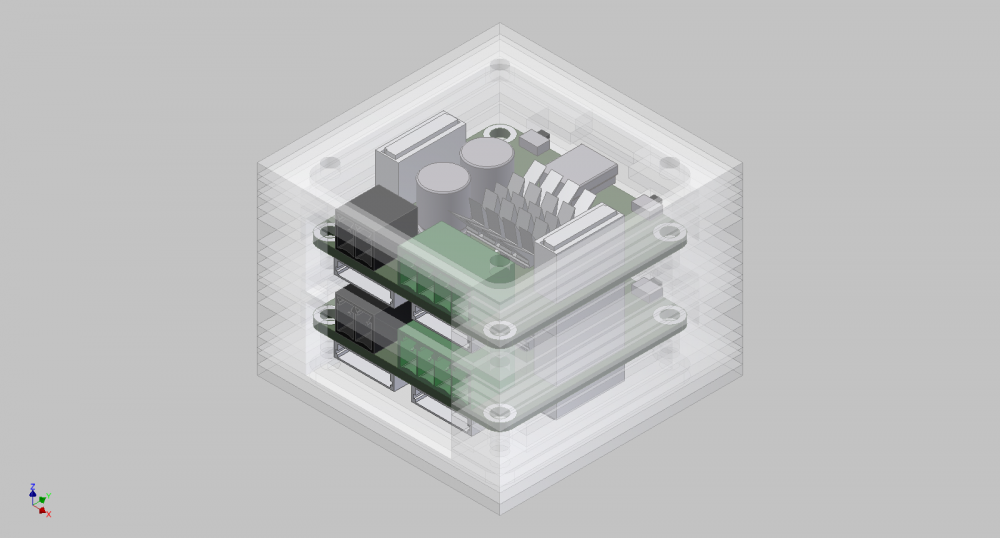
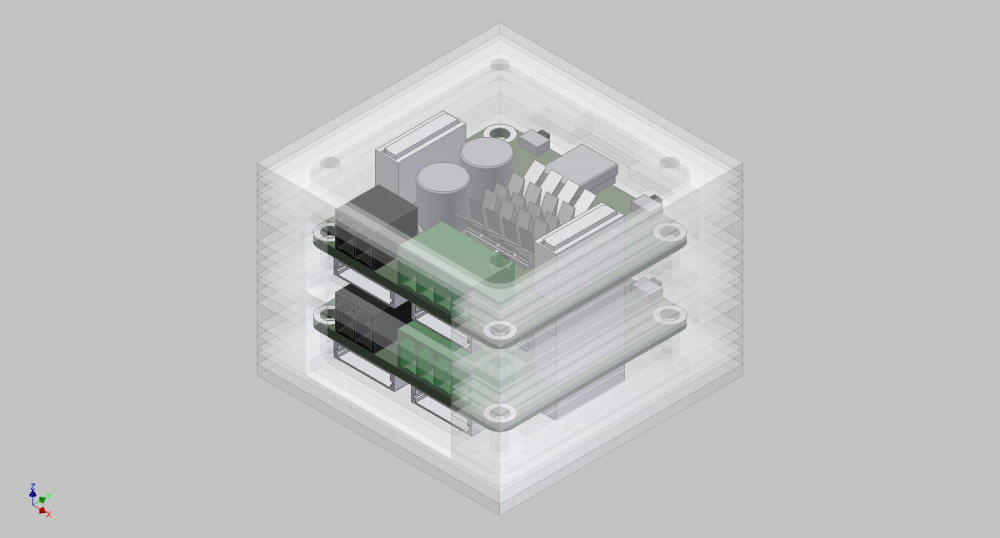
Ich vermute mal, das bei deinem gedruckten Gehäuse nicht berücksichtigt wurde, dass der Master Boardverbinder kleiner als der der anderen ist. Ich hatte das ja erst mal nur für die Bricks wie DC, Stepper, und Servo gemacht. Hier mal ein Bild von der Seite mit klarem Gehäuse.
-
Hi andreas301, super das du das Geld in die Hand genommen hast, um das zu probieren. Mit den Toleranzen hatte ich dir ja schon gesagt, dass das damals zu knapp bemessen war. Für den Master hatte ich kein Gehäuse gemacht, wenn du oder jemand anderes das abgewandelt hat muss ein Fehler passiert sein. Anders kann ich mit das Problem mit dem Stapel nicht erklären da es passen müsste. Kannst du mal ein Bild reinstellen, wo der Master drin ist, ohne Deckel und Boden und von der Seite aufgenommen, damit ich sehe wie weit der BoardToBorad Anschluss heraussteht. Wie passt das mit den ganzen Anschlüssen? Bekommt man die Kabel alle ordentlich rein? Du sagtest das die Oberfläche nicht so rau ist, wie es auf den Bildern scheint. Kann man das abwischen? Sammelt sich da schnell schmutz? Wie ist es um die Stabilität des Gehäuses bestimmt? Ich weiß, Fragen über Fragen Noch mal Respekt das du das gekauft hast!
-
Also Feuer wird nicht gleich entstehen und einen Versuch ist es auf jeden Fall wert. Ein einfaches Mikro sollte ja reichen und das gibt definitiv eine Spannungsänderung aus. Wie groß die ist und wie man das interpretieren muss, ist mir auch nicht geläufig. Es ist natürlich auch von der gestellten Messaufgabe abhängig, vor allem vom Messbereich und der Empfindlichkeit.
-
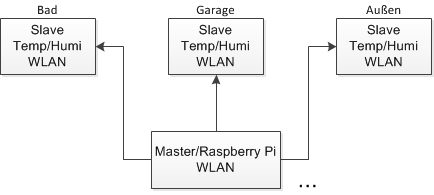
Also die Idee ist klasse und mir fallen noch viele ander Kits ein, was man da so zusammenstellen kann. Mir persönlich würde ebenfalls das klare Gehäuse reichen. Weiß ist evtl. auch noch was, wenn man es irgendwo schick hinhengen möchte. Ich denke mit der Grundausstattung passt das auch und man kann da modulare Erweiterungen/Ideen anbieten. Hab mal eine kleine Übersicht gemacht, wo ich Anwendungen sehe. Die Anschlüsse für USB/Ethernet würde ich nach unten rausführen.
-
Bei Pollin kostet er auch nur 39,95€ http://www.pollin.de/shop/suchergebnis.html?S_TEXT=Raspberry+Pi%2C+Modell+B&log=internal&recommend=true
-
Ach so, was natürlich super wäre ist mal so zu beschrieben was das kostet, wie lange die Lieferung dauert, Qualität des Druckteils und natürlich Bilde
-
Halt uns bitte auf dem Laufenden ob alles passt. Hatte ja nur sehr kleine Toleranzen berücksichtigt.
-
Schichtstapel hab ich schon gemacht. Hatte auch einen kleinen Lüfter besorgt, den wollte ich an einer Seite dran machen und über einen Kanal für Belüftung sorgen. Das ist hier noch nicht berücksichtigt.
-
Hi, die Entwürfe müssten alle von mir stammen. Ich habe im Moment nicht viel Zeit für das Projekt, verfolge aber gerade eine andere Möglichkeit des modularen Aufbaus. Da das mit dem 3D-Drucken nur schwer realisierbar ist, da die Bricks und Bricklets sehr große Toleranzen vom Bestücker mit bekommen. Der schichtweise Aufbau ist daher denke ich geeigneter und das werde ich demnächst mal reinstellen. Ich habe das für den 3D-Drucker aber nicht vergessen, aber das steht hinten an. Dafür hatte ich auch schon Stapelvarianten.
-
Ich werde wohl doch erst in den nächsten Wochen dazu kommen an den Gehäuseteilen im Schichtverfahren weiter zuarbeiten. Das Projekt ist also nicht tot
-
@AuronX Ist das Übersetzungsverhältnis i < 1 ist es eine Übersetzung, ist i > 1 so spricht man auch von einer Untersetzung. In deinem Fall muss du um auf i zu kommen deine Antriebsdrechzahl duch deine Abtriebsdrehzahl teilen. Das heißt i = 16000/64000 = 0,25 --> also eine Übersetzung. Bei Wiki giebt es auch einen Eintrag dazu ^^
-
Nic, jeder Vorschlag wird genau geprüft. Anhand von Kriterien werden dann Entscheidungen getroffen, welche in einer Entscheidungsmatrix dargestellt werden. Danach kommt alles auf die Waage und es wird ein Ergebnis, entsprechend der gesetzten Schwerpunkte erarbeitet.
-
Konnte die Vergleichsmessung noch nicht durchführen, da das Messgerät belegt ist. Werde ich aber die Tage nachholen und dann bereitstellen. Hoffe, dass das Messgerät auch ausreicht
-
Das hab ich vorhin auch gerade gesehen. Ich denka aber das man damit keine geeigneten Flächen herstellen kann. Wenn es dafür andere Düsen gibt, dann vielleicht.
-
@Nic Das wäre super. Ich schau mal was mir fehlt und dann meld ich mich
-
@Nic An den Master hab ich mich schon gemacht. Möchte das ja möglichst Einheitlich, also wenig sonderteile, ein Material, wenig unterschiedliche Dicken. Bei den Erweiterungen muss ich leider passen da ich keine da hab, zumindest kann ich da nur von den groben Maßen ausgehen, die TF bereitstellt. Ich schau mal was sich da machen lässt.
-
Ich hab in letzter Zeit etwas weiter gemacht. Auch wegen Kühlung und Co hab ich evtl. eine passende Idee. Mit den einzelnen Schichten wird das, denke ich, finanzierbarer. Werde meine Ergüsse mal ordnen und aktuelles bereitstellen.
-
Genial, ein C64. Ich hatte auch mal einen. Leider war mein Vater der Auffassung das den niemand mehr brauchte und hat alles entsorgt. Das meinte zumindest er und ich war leider nicht in Reichweite um einzugreifen. Das Bild ruft tiefe Trauer hervor, auf Grund des Verlustes :'(. @AuronX Deine These entspricht vermutlich der Wahrheit ^^ Mal ganz unbeholfen, da ich das Prinzip noch nicht kenne. Wo sitzen die Lichtschranken an so einem System?
-
Hab ich auch gesehen. Sieht interessant aus. Vielleicht wird ja das Sensorangebot erweitert, dann kann man das mit TF realisieren.
-
Richtig rey90, wenn du drei Acchsen betreiben möchtest benötigst du 3xStepper und 3x einen passenden Motor. Wenn du schon weißt was du Fräsen möchtest kann man auch entsprechende Motoren auswähen. Vielleicht reichen ja welche mit geringer Leistung, die sind auch nicht so teuer. Aber du sagtest ja das du einen Motor aus nem Drucker hast, da haben die definitiv mehr Leistung, auch die kleinen
-
Ich hab jetzt ein Stapel gebaut mit unterschiedlichen Materialdicken, allerdings nur 3 verschiedene. Dabei könnte man auch zwei draus machen. Jetzt sind es 1, 2 und 4 mm Dicke. Anbei ein Bild vom Stabel. Bin gerade dabei Fehler auszumerzen, darum hab ich den Stepper-Brick auch genauer nachgebildet. Außerdem bin ich an einer Lösung zur Belüftung.
-
Also die Motoren auf Scannern, Laufwerken, Druckern usw. sind in der Regel Schritt-, Servo- oder Brushless Motoren. Das siehste ja am Anschluss, also ob da zwei oder mehrere Drähte dran sind. Was willst du denn mir dem Motor machen?
-
Hallo luxor, also zwischen zwei aufeinander gestapelten Bricks hab ich 13,2mm gemessen. Mein letztes Gehäuse für den 3D-Drucker hat ohne Führungsnut eine Höhe von 15,8mm und mit den Schichten a 2mm komme ich insgesamt auf 16mm. Problem ist halt, dass zwar die Komponenten auf den Boards genormt sind aber der Bestücker eine relativ große Toleranz beim Setzen hat, was jetzt ziemlich hinderlich ist wenn wir etwas Einheitliches erstellen wollen. Werde noch etwas experimentieren, vielleicht gehen ja auch zwei Dicken, aber da bräuchte man dann wieder verschiedenes Material was den Preis hoch treiben würde . HAst du deinen Drucker neu eingestellt?
-
Hallo AuronX, also wie gesagt eine Kalibrierung hab ich nicht vorgenommen. War mehr zur Probe gedacht. Der Motor hat glaube maximal 14500 U/min, hab ihn aber nicht mit voll Drehzahl laufen lassen. Messprobleme hatte ich keine. Der I/O hat immer eine Veränderung zwischen High und Low und bei dem AOmA Signal war ich im unteren Messbereich des Sensors. Die Sensoren können (muss ich noch mal prüfen) max. 10000 U/min. Bin mir da aber nicht ganz sicher. Ich schätze mal, dass ich so bis 5000 - 6000 U/min gemessen habe. Werde das mal mit einem Messgerät vergleichen, also bei einer mir bekannten Umdrehung.