



lecktricker
Members
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von lecktricker
-
Kann mir mal bitte jemand beschreiben, wie man ein neues Projekt im Wiki veröffentlicht? Ich finde die Funktion zum Erstellen einer neuen Seite nicht.
-
1. wäre aber echt eine gute Idee 2. funzt 3. funzt auch merci
-
Ich hab da mal drei Fragen: 1. Gibt es eine Möglichkeit aus der Software heraus das Display zu drehen, so das die Tasten oben sind und die Schrift nicht auf dem Kopf steht? 2. Wie muss ich mein Programm schreiben damit keine Zeichen stehen bleiben? Ich habe einen Callback für einen Joystick, wenn der Wert -100 ist und danach wieder 0 bleibt die 100 stehen und wird nicht zurück gesetzt / gelöscht. Oder muss ich jedes mal Clear() aufrufen? 3. Wie bekomme ich ein Gleitkommazahl? Bei mir wird die Chiptemperatur mit 157°C angegeben und wenn ich es durch 10 teile steht nur noch 15 da.

-
Den Bug kann ich bestätigen, mir ist das gestern auch Aufgefallen, aber ich bin nicht mehr zur Fehlersuche gekommen.
-
Die Impulsfrequenz entspricht der Eigenfrequenz des Bauteils und alles fängt an zu schwingen. Bei kleinen Motoren relativ egal, bei großen sollte man sicherstellen, dass diese nicht beschädigt werden oder sich aus der Verankerung lösen und weg laufen durch die Vibrationen. Wenn es dich interssiert such mal unter Resonazfrequenz oder Resonazkatastrophe im Inet.
-
Schön das es funktioniert. So ging es mir auch, bis er sich das erste Mal deformiert hatte, da der IR Sensor nicht alles erfassen konnte Ich bin echt mal gespannt auf deinen Code, wie du das erstellt hast.
-
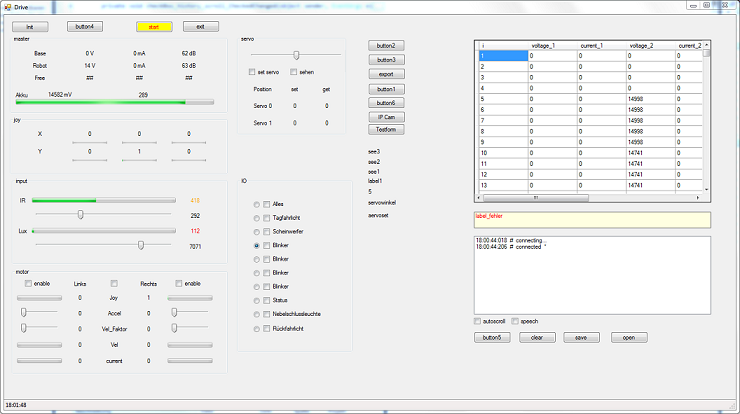
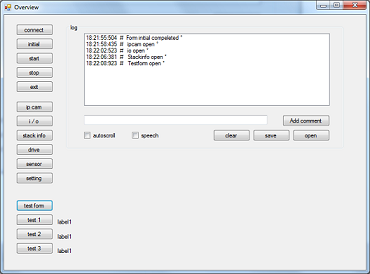
Prolog: Da ich nicht aus der Programmierszene stamme und ich mir alles selbst anlernen muss, bin ich derzeit an einem Punkt, wo ich konfus auf dem Bahnhof stehe und nur noch ICE´s am vorbei rauschen sind. Vorstellung: Die Frage ist recht simple, ich will einen Übersichtsform haben und Unterformen für spezifische Teile. z.B. Hauptform - Overview - Ansicht des Akkuzustandes 2. Form - Stackinfo - Ansicht der angeschlossenen Elemente 3. Form - I/O - Manuelles setzen der I/O 4. Form - Drive - manuelles Fahren des Robots Problem: Ich habe den Faden verloren, irgendwo zwischen Array, List, Dataset, Datatable,Dataview, Globalen Variablen und IP Connection. Aufgabe: 1. Wie verarbeitet man am sinnvollsten die Verbindungen und Daten der Bricks. z.B. Datenbank? 2. Wie habe ich zugriff auf alle Daten in allen Formen? 3. Ist meine Vorstellung umsetzbar oder ist das Thema Perfomance der Knackpunkt?
-
Ist die Tinkerforge.dll in den Verweisen mit eingebunden? Sind Host, Port und UID deklariert?
-
Hallo Germi 1) Ja, die Motoren sind im Chassie enthalten 2) kann ich dir leider nicht beantworten 3) Ich nutze einen Lithium - Ploymer - Akku vom RC Auto. Der Akku hat zwei Zellen d.h. 7,4V und 4200mAh
-
ich vermisse den berühmten [like] Button im Forum
-
Versuche es mal mit 1kHz, wenn das Fiepen störend wirken sollte musst du die Frequenz erhöhen. Ziel sollte es im Dauerbetrieb sein, dass der Strom konstant bleibt und zu keiner Zeit den Nullpunkt erreicht.
-
Hallo RudolfStolz, ich benutze zwei DC Bricks für die Ansteuerung der Motoren.
-
Hi Faab, da hast du dir aber etwas vorgenommen. Anbei eine Seite da kannst du dir ein paar Impressionen holen, für den Unterbau. http://www.nodna.de/Roboter-Zubehoer---346.html P.S. Eine Energiequelle fehlt noch
-
Ich möchte nicht behaupten das die Spannung egal ist, aber entscheidend ist der Strom der zur Verfügung gestellt werden kann. Ich habe ein altes Netzteil (15V) über den Adapter an eine Step Down Brick angeschlossen. Bei dem Roboterprojekt habe ich versucht mit dem dazugeliefertem Paket zu arbeiten ( 8*1,5V), aber da waren selbst die R6 Akkus zu schwach. Aktuell läuft der Roboter mit einem zweizellen Lipo (4200Ah) Akku von meinem Modellauto. Der Akku hat aber einen Kurzschlussstrom von 360A und da sollte man wissen was man macht
-
Das Problem kenne ich, das sind die Impulsraten, bei mir war es auch Servotyp unabhängig. Auch die Herstellerangaben haben nicht zum gewünschtem Erfolg geführt. Erklären kann ich das Problem nicht, aber ich habe dann solange probiert bis es gepasst hat, versuch es mal mit: Puls Width min/max: 700/2200
-
Das Schalten des Neutralleiters ist nur erlaubt, wenn - Allpolig geschalten wird, d.h. alle aktiven Leiter - der Neutralleiter Vor- oder Nacheilend geschalten wird Alles andere ist lt. DIN VDE 0100-460 nicht zulässig und ein potenzielles Sicherheitsrisiko. Beispiel: Würde man den Neutralleiter schalten, sind im ausgeschaltetem Zustand alle aktiven Teile Stromführend. In der Praxis würde man die Sicherung gegen Wiedereinschalten sichern und beim Glühbirnewechsel trotzdem eine gefeuert bekommen. Absolut unschön, deswegen niemals den Neutralleiter schalten.
-
Anbei mal ein Video vom fahrendem Objekt. https://plus.google.com/photos/101468417673064954764/albums/5739442797327572321/5739442795984832674#photos/101468417673064954764/albums/5739442797327572321 Die nächsten Schritte sind: - eine 360° Distanzmessung zu implementieren - eine Steuerung des Robots über einen Lagesensor von einem Smartphone aus
-
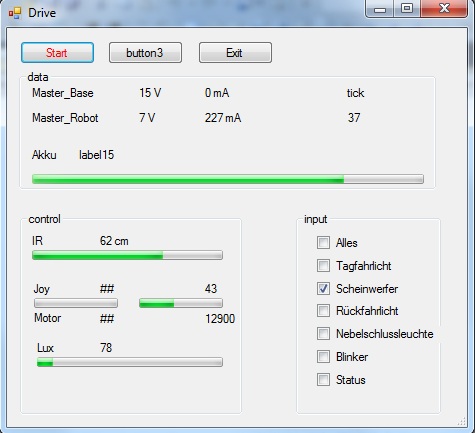
Im aktuellem Programm sind die Servos fest. Da funktioniert der IR Sensor (10-80cm) zuverlässig. Der Roboter fährt selbstständig in verschiedenen Geschwindigkeiten herum und fährt ggf. rückwärts wenn es zu nah war. Ich habe schon versuche gemacht mehrere Messpunkte in dem 360° Schwenkkreis auf zu nehmen, aber weit bin ich da noch nicht gekommen, weil ich das in einem Array schreiben wollte. Und da muss ich mich erst einmal belesen wie das geht. Aber die Info folgt, wenn ich Erfolge vermelden kann.
-
Da bin ich wohl ein Mittelsmann, im grünem Herzen von Deutschland. Oder mit den Worten eines Sachsen: der Bratwurstesserhauptstand Erfurt.
-
sieht wirklich schon etwas älter aus Hast du den mechanischen Regler mit angeschlossen? Und sehe ich das richtig, dass auf dem Auto der Lastwiderstand sitz? Wie hast du die Akku´s angeschlossen?
-
@ chillkroete Die FlightCam ist aber nicht günstig, solche Idee habe ich mir auch schon gemacht. Alternativ ein altes Smartphone mit oder ohne IP Cam. Es gibt auch aber günstige RC Kameras mit guter Qualität. @BOBmoraine Ja es ist nur ein IR Sensor. Die Servos sind in meinen Augen schnell genug, aber Details kann ich noch nicht nennen, weil ich noch keine Zeit hatte das Programm zu schreiben bzw. mir überhaupt Gedanken zu machen. Es ist aber schön zu sehen, dass andere ebenfalls ein neues Hobby mit Tinkerforge gefunden haben.
-
Hi Micha, lt. google ein Gewicht kleiner als 7.5Kg. Also dürften noch ein paar Gramm übrig bleiben. Aber so teuer sind die LiPos auch nicht mehr oder einen günstigeren NiMH. http://www.dfrobot.com/wiki/index.php?title=Tank_RP5_Chassis_(SKU:ROB0007)
-
Hi Masder, der Unterbau ist das Chassie vom PR5 / RP6 zu erwerben für 40€ beim großem C. http://www.conrad.de/ce/de/product/191152/FAHRGESTELL-ROBBY-RP5-ROBOTER/2420180 Ebay bietet auch möglichkeiten, über die wirkliche Qualtität kann ich dir aber nichts sagen. http://www.ebay.de/sch/i.html?_nkw=chassis+robot+&_cqr=true&_nkwusc=chassie+robot&_rdc=1
-
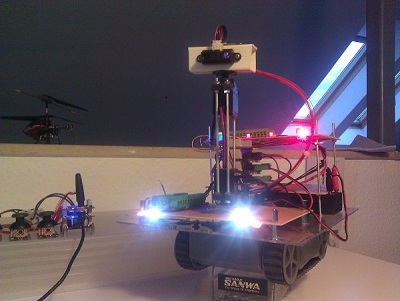
Hallo Tinkerforgebegeisterte, irgendwie sind bis jetzt nur praktische Projektideen präsentiert worden, das will ich hiermit beenden. Und stell euch mein zweites gebautes Spielzeug vor. Es ist ein fahrbarer Roboter mit einem RP6 Chassie,ein paar Servos,IR und Lichtsensor, einem 4200 mA Lipo und einer ganzen Menge Leds. Auf Grund der Tatsache das für mich das Programmieren mehr oder weniger Neuland ist habe ich mich für C# mit Windowsform entschieden und nutze Visual C# 2010. In dem Zug möchte ich gleich einen Verweis auf YouTube machen zu einem C# Tutorial ( ), das kann ich bestens Gewissens empfehlen und Galileo Computering (http://openbook.galileocomputing.de/visual_csharp_2010) aber das ist kein Geheimtipp mehr. Aktuell kann man mit dem Roboter per Joysticks fahren und die entsprechende Beleuchtung geht automatisch und Geschwindigkeitsüberwacht an. Die nächsten Schritte sind ein flüssiges Programm zu schreiben, da ich noch ein Defizit habe und nicht zurecht komme mit Methoden Klassen und Objekten. Und ein langfristiges Ziel ist es den Roboter mit Hilfe des 360° IR Sensor autonom fahren zu lassen. Falls die Frage aufkommen sollte, nein er hat noch keinen Namen


-
Hallo Miteinander, ein Brüstenmotor ist eine Gleichstrommaschine ( 2 Kabel ), d.h. es werden Kohlebürsten verwendet welche sich Abnutzen ( Bürstenfeuer ). Ein solcher Motor geht ab 5€ los (Typ 450) und kann mit dem DC Brick ( Gleichstrombrick) angestuert werden. Ein Brushlessmotor oder deut. bürstenloser Motor ist eine Drehstromasyschronmaschine ( 3 Kabel ) mit der Hilfe eines Steuergerätes (z.b. Fahrtenregler) wird eine Phaseverschiebung generiert, welche die Polpaare anregt. D.h. die Energie übertragung erfolgt über ein magnetisches Feld und somit hat man keine Reibungs- und Übergangswiderstände. Je mehr "Turns" ein Motor hat um so mehr Polpaare sind vorhanden und so mehr Drehmoment ist da. Die Kosten für einen relativ guten Motor mit Regler liegen bei 100€. Und nun meine Erfahrungen aus dem Modellbau: Ein Brushlessmotor im Auto ist durch nichts zu ersetzen. Eine Beschleunigung, Kraftentfaltung und Steuerbarkeit die seines gleichen sucht. So und meines Erachtens ist es nicht möglich einen Brushlessregler mit Tinkerforgebausteinen zu steuern. Ist dem so?