thunderbird
Members
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von thunderbird
-
So hier noch die Formel und die Info wo ich die her habe. (((0.13f * (float) Math.PI) * (windSpeedValue / 30f) * 2.5f) * 3.6f) http://www.mikrocontroller.net/topic/106108#1327294
-
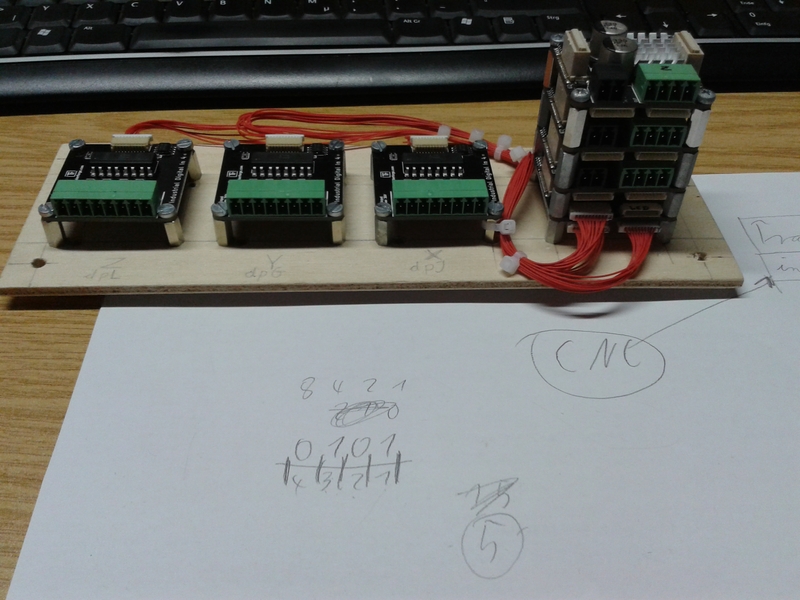
Moin Patrick, klar gerne ;-) Als das mit der Windrichtungsanzeige.. Ich weiß nicht ob deine Windrichtungsanzeige nach dem gleichen Prinzip funktioniert wie das bei mir der Fall ist. Vielleicht kannst du mal ein paar Bilder machen und sie mir schicken. Bei mir ist es so das es 4 Lichtschranken gibt. Zwischen den Lichtschranken läuft eine Art Lochscheibe die dann entweder Licht durch lässt (logisch 1) oder eben nicht(logisch 0) Mit dieser Technik kann ich 2^4 Zustände erzeugen 1 0000 2 0001 3 0010 4 0011 5 0100 6 0101 7 0110 8 0111 9 1000 10 1001 11 1010 12 1011 13 1100 14 1101 15 1110 16 1111 Diese Zustände werden dann einfach in Richtungen übertragen also z.B. 1 => N 2 => NNO ... Wenn du natürlich 8 Lichtschranken hast hast du eine höhere Auflösung und 2^8 Zustände. Deswegen nutze ich ein IO Bricklet. Ich hoffe das hilft dir erstmal weiter. Wegen der Windgeschwindigkeit suche ich dir nachher mal die Formeln raus. Wobei ich gerade an einem 2. Windmesser arbeite :-) Klar gerne kann dich dann auch gerne verlinken. Vielleicht kann man ja sogar Daten austauschen wenn du da Interesse hast so eine Art Wetterdaten Schnittelle.
-
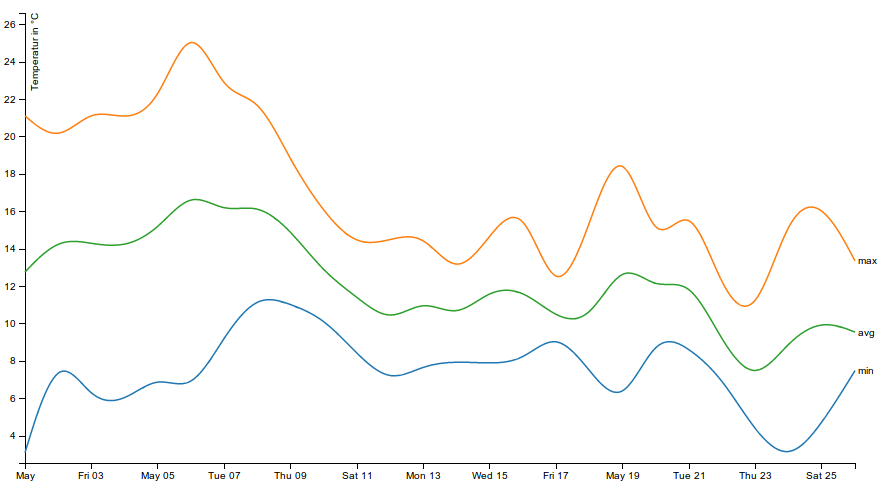
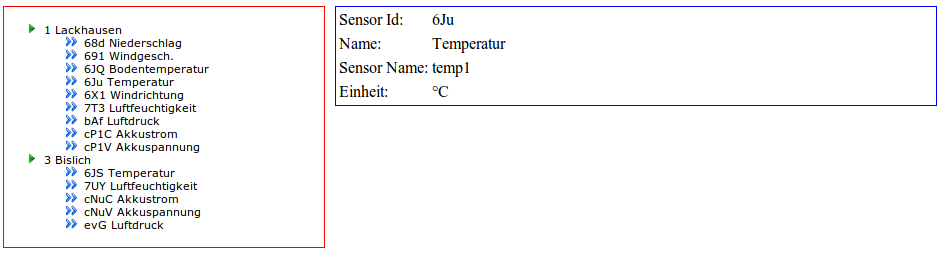
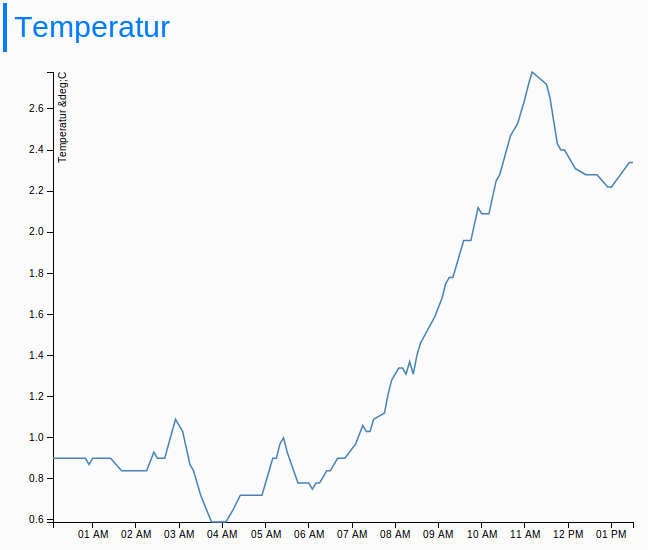
So langsam läuft es mit den Diagrammen. Bald wird die Monatsübersicht dazu kommen. Außerdem arbeite ich gerade an einer Konfigurations - Webseite für den Server(2. Bild).
-
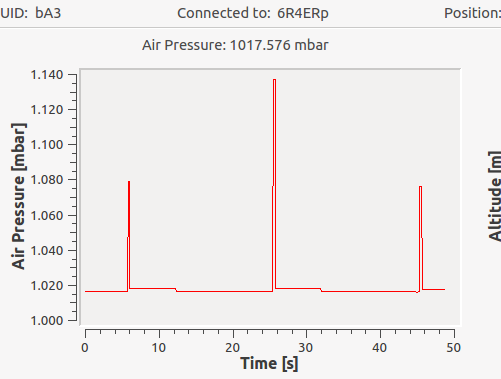
Hallo zusammen, ich habe in den letzten 2 Tagen ein interessantes Phänomen bezüglich der RS485 Geschwindigkeit gefunden. Ich habe 2 Stacks mit RS485 verbunden. 1 Stack RS485 (als Slave) Master Temp Bricklet Humidity Bricklet Barometer Bricklet Step Down Power 2 Stack RS485 (als Master) Master (per USB am Raspberry Pi) Voltage/Current Bricklet Step Down Power Beide Stacks habe ich über ein ca. 10m Telefonkable verbunden, über das auch die Stromversorgung von Stack 2 erfolgt. Jetzt zum Problem: Ist die RS 485 Geschwindigkeit 2000000 läuft alles problemlos. Gehe ich jetzt hin und stelle die Geschwindigkeit auf 1000000 runter so bekomme ich bei Temp Bricklet und Barometer Bricklet Fehler wie im Bild unten zu sehen. Stelle ich jetzt beim Temp Bricklet setI2CMode auf 1 bekomme ich nur noch Fehler beim Barometer Bricklet. Grundsätzlich ist das kein Problem ich lasse die Geschwindigkeit jetzt einfach auf 2000000. Da eine zweite Station aber nur mit 1000000 ohne Abbrüche läuft wollte ich gerne alles einheitlich haben eigentlich sollte das doch kein Problem sein oder Ich frage den Stack 2 alle 30 Sekunden ab. Alle Bricklets sind mit geschirmten 2m Kabeln angeschlossen.
-
Hallo BorgelMorgel, ja das ist das oben beschriebene Verhalten Ich habe es leider noch nicht geschafft das in meine Software einzubauen.
-
Meine Stationen laufen beide schon den ganzen Winter hatte da bis jetzt nie Probleme mit. Das Temp Bricklet hat ab und an Probleme mit langen Kabeln da muss man nen bisschen aufpassen aber sonst kein Thema(da gibts eine Einstellung http://www.tinkerforge.com/de/doc/Software/Bricklets/Temperature_Bricklet_Java.html#fortgeschrittene-funktionen die man anpassen kann.).
-
Ja genau die Sensoren sind in der Mitte. Den Master habe ich einem extra Gehäuse und verbinde die Sensoren mit 2m Kabeln. Das läuft sehr gut. Also mit Luftfeuchtigkeit hab ich bis jetzt keine Probleme gehabt. Klar bleiben die Sensoren nicht 100% trocken aber das hat bis jetzt keine Probleme gemacht.
-
Hallo pluto, du hast natürlich recht. Ein normales wasserdichtes Gehäuse ist nicht soo super. Es heißt sich auf und würde alle Werte verfälschen. Ich habs so gemacht: http://www.sven-lindeboom.net/?page_id=265 Bei diesem Gehäuse hat man immer genug Luftzug aber trotzdem ist alles vor Regen und direkter Sonneneinstrahlung geschützt. Ich hoffe das hilft dir weiter.
-
Hallo, hört sich gut an. Es wäre cool wenn du mit der Implementierung der Formel fertig bist deinen Quellcode mal hier vorstellen könntest. Mit der WLAN Extension kann ich dir leider nicht helfen ich habe keine ;-) Aber ich gehe davon aus das du den Stack erstmal per USB anschließen musst dann die Zugangsdaten von deinem wlan AP angibst und die IP auf DHCP stellst. Dann sollte der Stack beim nächsten reboot eine IP bekommen die du im brickv eingeben kannst und dich damit verbinden kannst.
-
Ahh ok Also normal ist es ja so, das du einfach irgendwas ans IO4 anschließt und dann in der Software abfragen kannst wie der aktuelle Zustand ist. Da das beim Windmesser extrem schnell sein muss wenn viel Wind da ist kannst du bei TF eine Callback Funktion definieren diese Funktion wird immer dann aufgerufen wenn sich der Zustand deines IO4 ändert. Das nennt sich Interrupt. Somit bekommst du immer eine "Info" wenn ein Kontakt geschlossen wird.
-
Moin moin, joo du hast recht ein Master und ein IO -4 sind dafür gut geeignet. Ich habe auch schon ein solches Anemometer über TF ausgelesen. Du kannst dafür sehr gut den Interrupt benutzen. Als Hilfestellung kann ich dir noch diese Seite geben. http://www.mikrocontroller.net/topic/106108#1327294 Dort ist eine Formel angegeben, wie man sowas berechnet. Was genau für ein Anemometer hast du ? Ich habe ein TX23das hat nur einen Kontakt pro Umdrehung. www.sven-lindeboom.net
-
Ist vielleicht ein bisschen übertrieben aber es ist sehr kompakt und ich kann mich darauf verlassen, dass es ein paar Jahre problemlos funktioniert. Außerdem war das ja die 1 Version ich habe schon einen weiteren Standort aber erstmal werde ich mich um weitere sensoren kümmern.
-
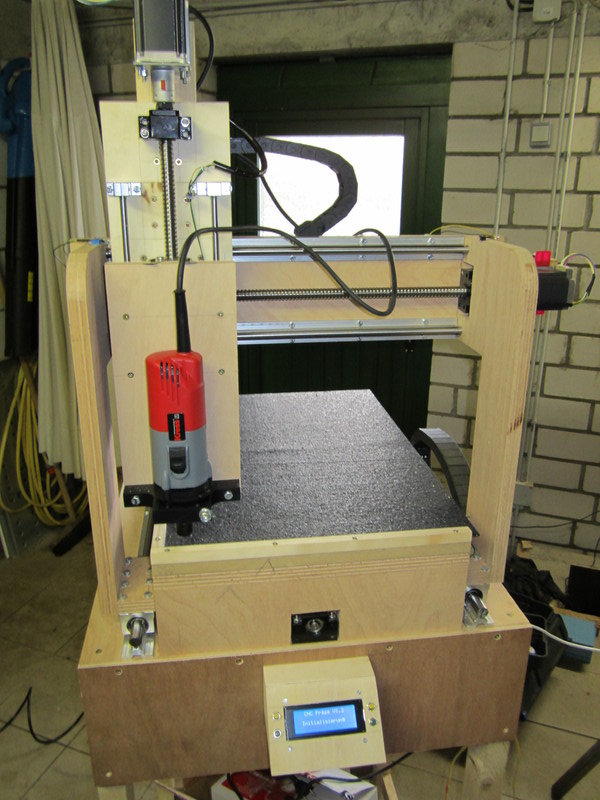
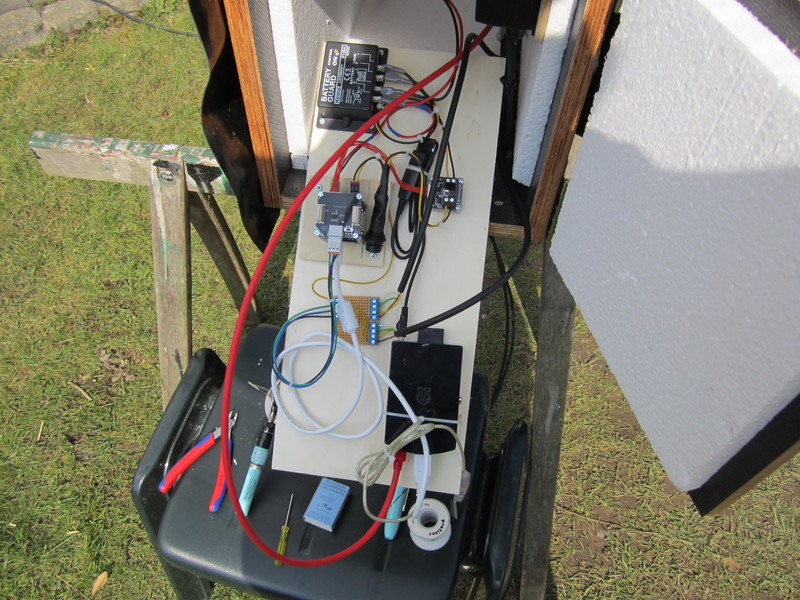
Na endlich geht`s auch hier wieder weiter. Ich habe meine 2 Station noch ein bisschen umgebaut. Sie hat jetzt einen externen Lan-Anschluss über den man den Laptop direkt mit dem Raspberry Pi verbinden kann. Außerdem habe ich die Kiste mit einer Folie bespannt, so das das Holz auch ein bisschen geschützt ist. Da ich mit dem aktuellen UMTS Stick ein bisschen Probleme hatte habe ich einen Huawai E303 eingebaut. Für diesen Stick ist kein Programm mehr erforderlich die Verbindung wird automatisch aufgebaut und wird von Pi als zusätzliche Lan-Karte erkannt. Das ist sehr praktisch. Habe noch einige aktuelle Bilder angehängt. In 2 bis 3 Wochen wird die Station an ihren richtigen Standort gebracht. Dann kann ich mich daran machen Software und Sensoren weiter zu verbessern.


-
;-) Ja im Moment habe ich noch keine bessere Möglichkeit gefunden. Ich überlege ob ich noch Befestigungsverschraubungen in die untere Platte mache, in verschiedenen Abständen.
-
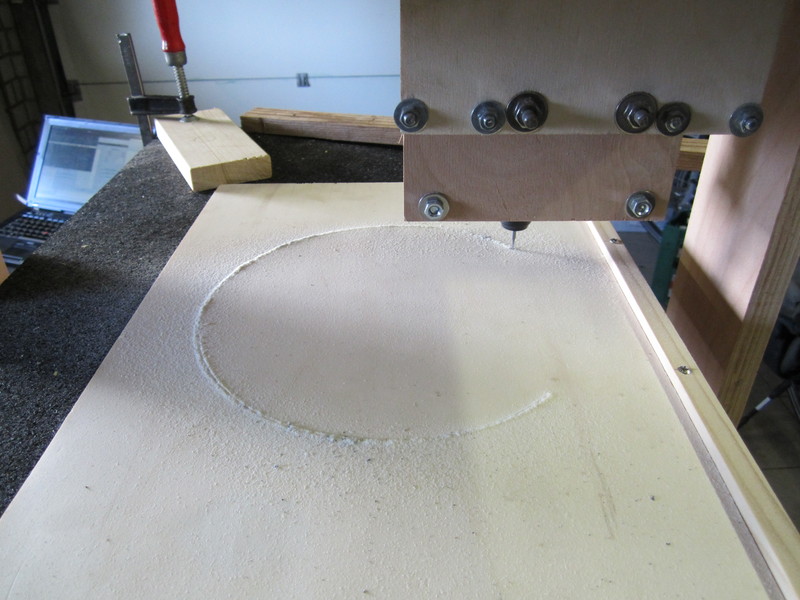
Heute habe ich mal den ersten Kreis aus einer GCode Datei generiert. Sieht alles schon ganz gut aus geht aber leider noch ein bisschen langsam.
-
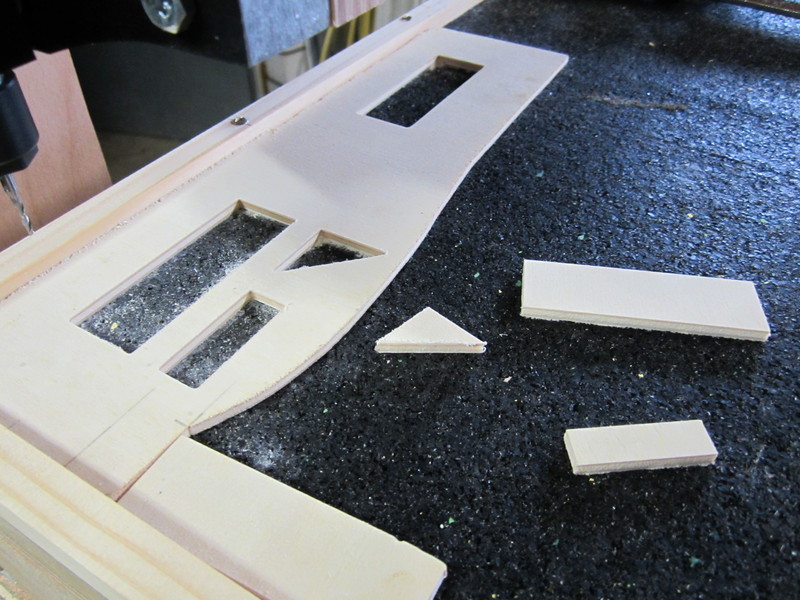
Sooo da ist es fast geschafft ;-) Hier einige Bilder der ersten Teile und auch ein Video.


-
Ja da könntest du recht haben das werde ich aber erstmal austesten. Ich hoffe am Wochenende endlich mal wieder ein bisschen Zeit zu haben ;-)
-
Hallo, ja bei mir sind die Sensoren im so einem Strahlenschutz (http://www.sven-lindeboom.net/?page_id=265) eingebaut. Dieser schätzt auch gegen Regen, Schnee usw. Das Problem mit den 100% Luftfeuchtigkeit habe ich aber auch allerdings nur in der Nacht. Wenn man sich das Diagramm ansieht sind es immer einige Stunden.
-
@borg Schön wäre, wenn man die Stepper einfach Gruppieren könnte und dann nur noch eine Funktion hat die man aufrufen müsste. Sowas wie setStepsGrouped(Stepper1,Stepper2, ...); @jan Wenn ich das richtig verstehe, geht es nicht darum, einfach 2 Stepper die gleichzeitig eine Anzahl an Schritten fahren zu lassen sondern mehrere Stepper gleichzeitig zu starten und unterschiedlich viele Schritte fahren zu lassen.
-
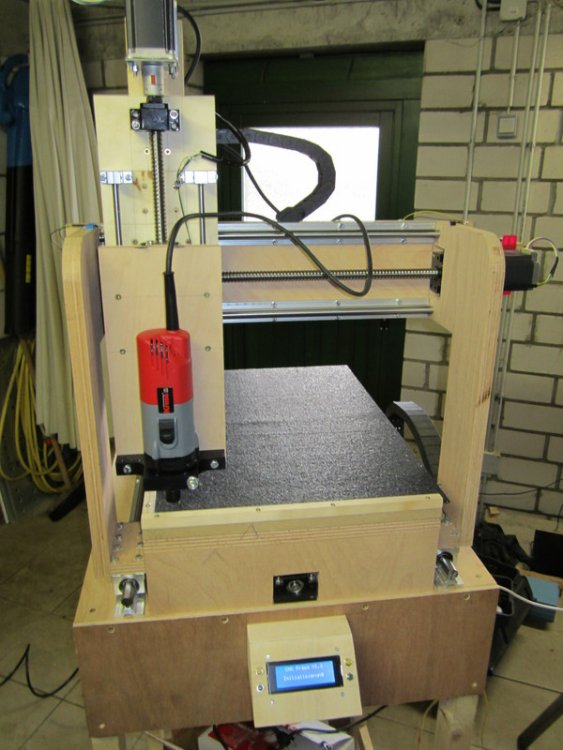
Hallo luxor, grundsätzlich besteht meine Software aus zwei Teilen. Der eine Teil läuft direkt auf einem kleinen PC in der Fräse. Dieser Teil macht die eigentliche Steuerung der Motoren, der Endschalter und des Displays (LCD 20x4). Außerdem macht dieser Teil beim Starten eine Initialfahrt bei dem die Anfangs- und Endpositionen festgelegt werden. Nach dieser Initialfahrt wird noch ein TCP Server gestartet. Dieser Server nimmt die einzelnen Schritte der Motoren, sowie die Geschwindigkeit an(X-Achse#Y-Achse#Z-Achse#Geschwindigkeit) und steuert die Motoren entsprechend. Der zweite Teil der Software läuft auf einem normalen PC und ist per Lan Kabel mit der Fräse verbunden. Er übernimmt die Berechnung der einzelnen Schritte aus einer G-Code Datei. Dieser G-Code lässt sich aus den meisten Zeichnungen erstellen und beinhaltet eigentlich alles was man zum Fräsen wissen muss. Beide Teile der Software sollen in Java geschrieben sein (Teil 1 ist schon fertig, Teil 2 noch nicht). Ich hoffe das das mit der Geschwindigkeit ausreicht sonst werde ich wohl nochmal c++ nutzen müssen ;-).
-
Nachdem es jetzt endlich wieder ein bisschen wärmer wird geht es wieder in die Garage und an die Fräse. Ich habe meine Steuerungsbricklets noch ein bisschen angepasst. Anstatt der 3 IO4 Bricklets habe ich jetzt 3 Industrial Bricklets verwendet. Außerdem läuft die Software jetzt mit dem Protokoll 2.0.
-
Perfekt :-) Damit geht`s auch nach dem neustart.
-
Hallo, ich habe gerade den Brickd (v2.0.1) auf meinem Raspberry installiert soweit kein Problem. Nach einem neustart des Pis läuft der Brickd auch wieder lässt aber keine Verbindung mehr zu: 2013-02-01 17:20:31.538641 <I> <main_linux.c:315> Brick Daemon 2.0.1 started 2013-02-01 17:20:31.733478 <I> <usb.c:149> Added USB device (bus: 1, device: 4) at index 0: Master Brick [67N4R2] 2013-02-01 17:20:35.787436 <E> <client.c:171> Could not get peer name of client (socket: 15): EAI_AGAIN (72000003) 2013-02-01 17:20:35.899697 <E> <client.c:171> Could not get peer name of client (socket: 15): EAI_AGAIN (72000003) 2013-02-01 17:20:36.009019 <E> <client.c:171> Could not get peer name of client (socket: 15): EAI_AGAIN (72000003) 2013-02-01 17:20:36.121698 <E> <client.c:171> Could not get peer name of client (socket: 15): EAI_AGAIN (72000003) 2013-02-01 17:20:36.231471 <E> <client.c:171> Could not get peer name of client (socket: 15): EAI_AGAIN (72000003) 2013-02-01 17:23:49.801646 <E> <client.c:171> Could not get peer name of client (socket: 15): EAI_AGAIN (72000003) Verbindung wollte ich mit dem Brickv aufnehmen der auf einem anderen PC läuft (Ubuntu 12.4 64bit) direkt nach der Installation kein Problem. Nach dem neustart nicht mehr möglich. Pi und PC haben je eine feste IP.
-
Set dem Wochenende gibt es endlich auch wieder Diagramme :-) Außerdem habe ich das fertige Protokoll 2.0 in den Client eingebaut.
-
Moin Stephan, im Moment ist die Version 2.0 noch Beta. Infos dazu findest du hier: http://www.tinkerunity.org/forum/index.php/topic,1238.0.html Wenn du aber nicht experimentieren willst, ist die 1.x.x Version richtig.