




thunderbird
Members
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von thunderbird
-
Ja ich habe das Problem mit beiden. Ich habe aber noch die 256MB Version weiß nicht ob das was aus macht wenn die Java VM zu viel Speicher haben will das es da Probleme gibt. Es ist mir jetzt mehrmals passiert. Es ist total zufällig zwischen 2,5 Wochen und 3 Tagen hatte ich schon fast alles... Das sieht dann im Log so aus: Dec 4 04:00:15 raspberrypi kernel: [280530.266764] smsc95xx 1-1.1:1.0: eth0: Failed to read register index 0x00000114 Dec 4 04:00:20 raspberrypi kernel: [280535.266889] smsc95xx 1-1.1:1.0: eth0: Failed to write register index 0x00000114 Dec 4 04:00:25 raspberrypi kernel: [280540.266990] smsc95xx 1-1.1:1.0: eth0: Failed to read register index 0x00000114 Dec 4 04:00:30 raspberrypi kernel: [280545.267110] smsc95xx 1-1.1:1.0: eth0: Failed to read register index 0x00000118 Dec 4 04:00:36 raspberrypi kernel: [280550.887250] smsc95xx 1-1.1:1.0: eth0: Failed to write register index 0x00000014 Dec 4 04:00:36 raspberrypi kernel: [280550.887282] smsc95xx 1-1.1:1.0: eth0: Failed to write HW_CFG_LRST_ bit in HW_CFG register, ret = -110 Dec 4 04:00:42 raspberrypi kernel: [280556.887396] smsc95xx 1-1.1:1.0: eth0: Failed to write register index 0x00000014 Dec 4 04:00:42 raspberrypi kernel: [280556.887429] smsc95xx 1-1.1:1.0: eth0: Failed to write HW_CFG_LRST_ bit in HW_CFG register, ret = -110 Dec 4 04:00:48 raspberrypi kernel: [280562.887534] smsc95xx 1-1.1:1.0: eth0: Failed to write register index 0x00000014 Dec 4 04:00:48 raspberrypi kernel: [280562.887566] smsc95xx 1-1.1:1.0: eth0: Failed to write HW_CFG_LRST_ bit in HW_CFG register, ret = -110 Dec 4 04:00:54 raspberrypi kernel: [280568.887672] smsc95xx 1-1.1:1.0: eth0: Failed to write register index 0x00000014
-
Nachdem ich nun zwei Wochen in Frankfurt verbracht habe und leider nichts an meiner Station machen konnte habe ich gerade mal einige Probleme behoben ;-) - Client sendet zu viele Werte an den Server (Wertebereich 0,001) - Stürzt die Netzwerkkarte des Raspberrys ab werden zwar die Daten gecached aber nur im Arbeitsspeicher muss der Pi neugestartet werden, gehen die Daten verloren. Hier gibt es jetzt eine lokale DB4O Datenbank. Wird der Server mehr als 10 mal nicht erreicht werden die Daten automatisch in diese Datenbank geschrieben. Ist der Server wieder erreichbar werden die Daten aus der Datenbank automatisch übertragen. - Ausfall des Worker-Threads. Fällt der Worker aus und sendet keine Daten mehr an den Server wird dies vom Heartbeat bemerkt und dieser wird ebenfalls beendet. Ich habe in den letzten Wochen leider öffters Probleme mit meinen zwei Raspberrys gehabt. Ab und an passiert es das die Netzwerkkarte aus mir nicht bekannten gründen ein bestimmtes Register nicht mehr erreichen kann. Der Pi läuft zwar noch man kann ihn aber nicht mehr erreichen. Bis jetzt konnte ich das immer nur durch einen neustart wieder beheben.
-
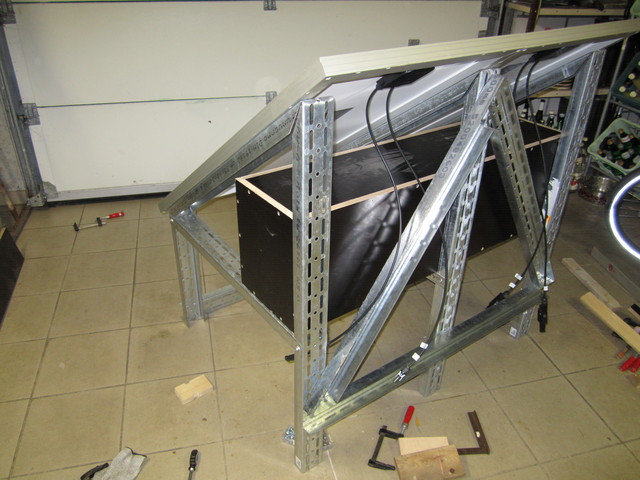
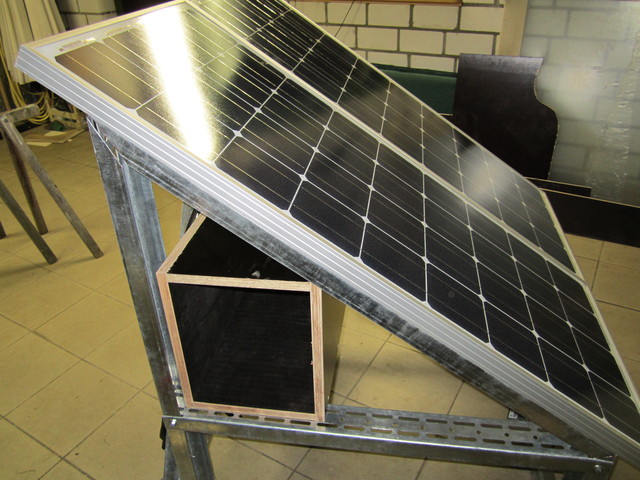
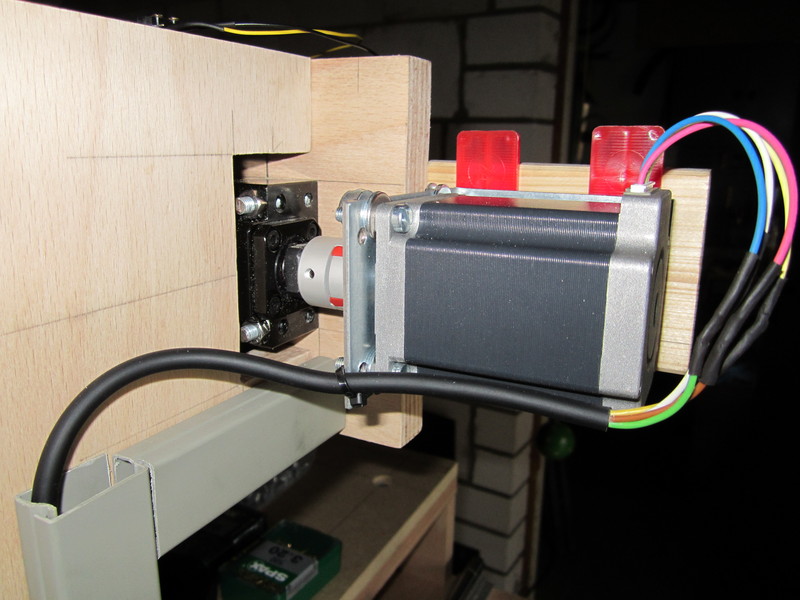
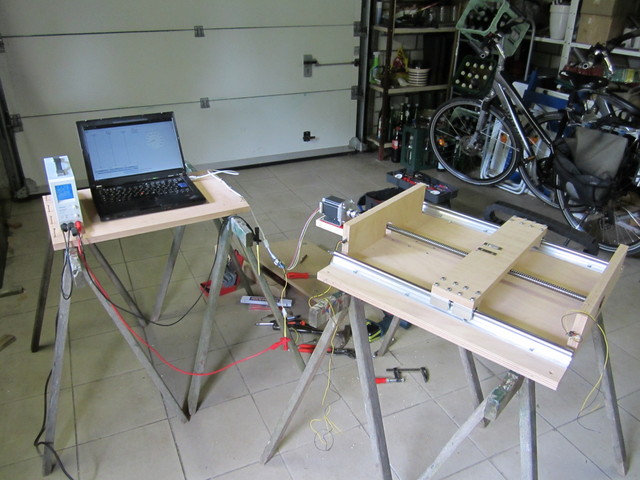
Hier mal ein paar neue Bilder von der zweiten Station.

-
@jan Also bei mir besteht das Problem auch immer noch wenn ich eine "normale" Firmware nehme. Die mit 100khz funktioniert dagegen super. Grundsätzlich sollte es möglich sein alle 4 Bricklets an einem Master mit 2m Kabeln zu betreiben. Soweit ich weiß ist die Grenze 12m gesamt. @borg Kann dieser Fehler mit dem Protokoll 2.0 auch noch auftreten??
-
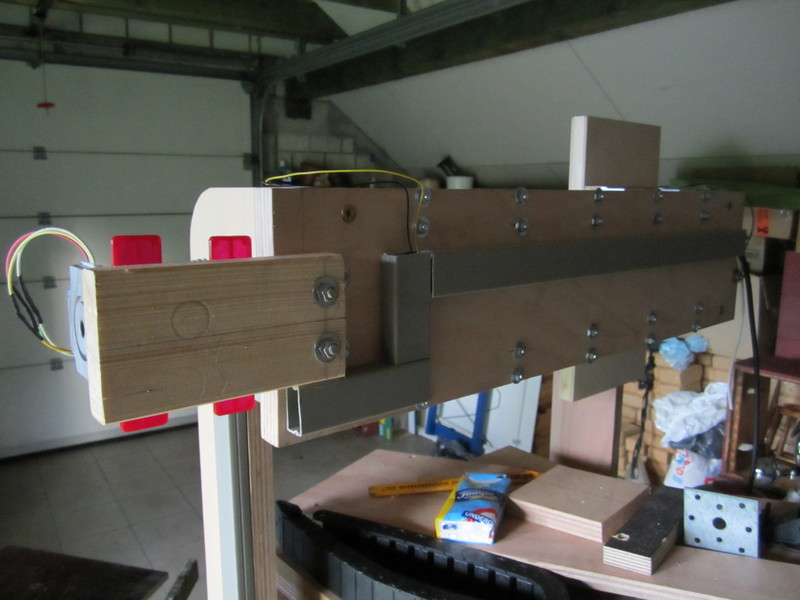
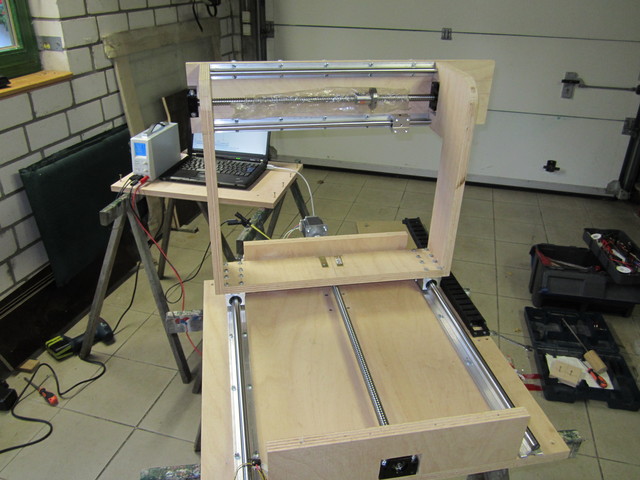
Letztes Wochenende habe ich mich mal um die Z-Achse gekümmert. @BorgelMorgel: Ja das war auch meine Idee mir eine solche Halterung selber zu bauen. Wie ich das Werkstück befestige weiß ich noch nicht so recht. Das werde ich einfach austesten wies am besten geht wenn ich die ersten Versuche mache. Die Absaugung werde ich erstmal von Hand mit dem Staubsauger machen. Ich kann mir aber auch gut vorstellen säter da noch was dran zu ändern. Die Kabelführungen sind bei ebay unter dem Begriff "energiekette" zu finden ;-) Wegen der Halterung der Y-Achse werde ich mir das mal ansehen wenns wirklich so schlimm wird dann werde ich da noch was dran ändern.

-
Letztes Wochenende habe ich mich mal wieder um meine zweite Station gekümmert. Die gesamte Station soll möglichst Kompakt gebaut sein. Deswegen habe ich mich dafür entschieden, die gesamte Technik und die Solarzellen die den nötigen Strom liefern in ein Gerüst aus U-Profilen einzubaun. Die Sensoren werden extern an einem getrennten Mast befestigt und über RS485 mit der "Basis" verbunden(http://www.sven-lindeboom.net/?p=375). Die Basis besteht aus einem Raspberry Pi mit UMTS Stick sowie einem Master mit RS485. Außerdem habe ich mich noch um die API für die Webseite gekümmert. Diese liefert jetzt auch min., max. und Durchschnittswerte per JSON http://www.sven-lindeboom.net/?page_id=27 .Alle Werte werden automatisch aktualisiert ohne zutuen des Benutzers. Außerdem gibt es bessere Fehlermeldungen. @ ArcaneDraconum: Das stimmt. Nur das man immer 2 AnalogIn Bricklets brauchte ;-)



-
Moin Moin, also die letzten Tage waren auch hier recht nass und kalt(-3°C) ich konnte aber keine Probleme feststellen. Alles läuft so wie es soll. Die Werte sind alle gut. Im Moment gibt`s also noch keine Probleme ;-)
-
Heute habe den Server auf meinen neuen vServer umgezogen. Jetzt läuft das ganze viel stabiler. Außerdem habe ich die Verbindung zur Webseite auf JSON umgestellt. Somit ist das verarbeiten auf der Seite selber viel einfacher geworden. Leider habe ich es noch nicht geschafft, alle Funktionen umzustellen. So das im Moment nur die Anzeige der aktuellen Werte geht. Diese wird automatisch aktualisiert wenn sich auf dem Server was ändert. Alle anderen Funktionen kommen mit der Zeit.
-
Soo hier gibts mal wieder was neues :-) Nachdem ich gestern meine selbstgebauten Luftdruck Sensoren gegen die Barometer Brickelts ausgetauscht habe, bin ich heute angefangen die API für die Webseite umzustellen. Das ganze läuft jetzt mit JSON und AJAX so das die Werte auch automatisch aktualisiert werden. Außerdem habe ich mir einen ordentlichen vServer zugelegt auf dem bald meine Serveranwendung laufen soll.
-
@AuronX Ist natürlich richtig das man so nicht alle Achsen gleichzeitig fahren kann. Deswegen würde ich das ganze auch trennen. xStepper.setSteps(10); yStepper.setSteps(10); zStepper.setSteps(10); xStepper.waitPositionReached(); yStepper.waitPositionReached(); zStepper.waitPositionReached(); So könnte man auf alle Achsen warten. Ist die Achse schon an der richtigen Position kommt die Funktion sofort zurück. Ist also so eine Art Join für Stepper. Wegen so einer erweiterten API können wir gerne mal drüber spreche ich hätte da auch noch Sachen für einige Bricklets. @gagahhag So in der Art habe ich es im Moment auch gelöst. Fände es aber schöner wenn es in der API wäre, ist ja doch recht elementar ist. Ich schreibe meinen Code in JAVA
-
Hallo, ich baue gerade eine CNC Fräse. Dabei ist mir aufgefallen, dass mir da eine Methode fehlt die so lange blockiert, bis die mit setSteps gesetzte Position erreicht wurde. Ich kann das zwar über die Callback Funktion lösen, dass ist aber sehr umständlich. Schöner wäre es wenn ich eine direkte Methode in der API hätte.
-
@BorgelMorgel also erstmal werde ich bei holz bleiben denke ich außer wenn es später viieel zu ungenau wird was aber bis jetzt nicht so aussieht. Als Fräse würde ich gerne eine art Dremel von Proxxon nehmen aber leider gibt es dafür keine Halterung da müsste ich mir dann selber noch was bauen ;-) Hoffe das ich bis zum We die Teile für die Z-Achse bekomme dann werde ich mich darum kümmern. Problematisch finde ich auch noch die Endschalter an der Z-Achse. Da muss ich mich noch was überlegen wie ich dort welche anbringen kann. Gestern hab ich mich dann auch schonmal mit dxf Dateien und G-Code angefreundet ;-) Hab da auch schon eine Idee wie ich das umsetze aber Kreise machen mir noch ein bisschen Sorgen...
-
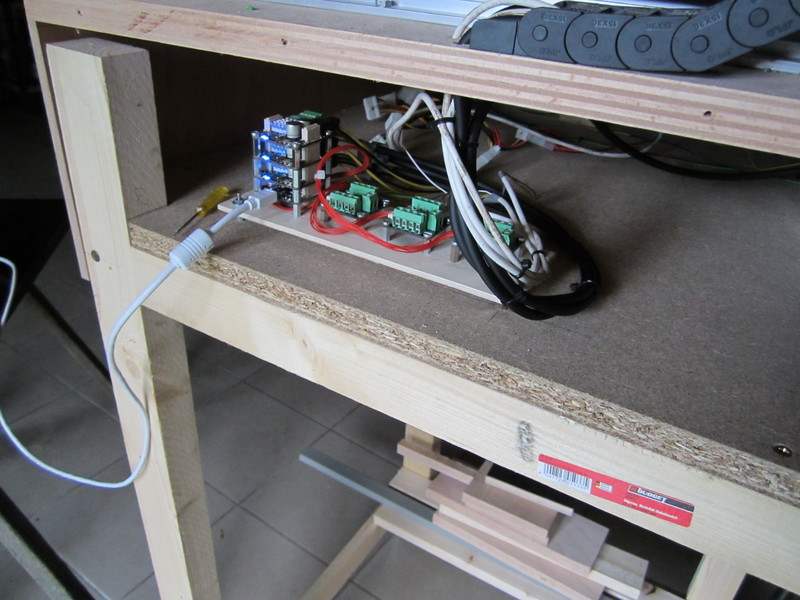
Hier noch ein paar neue Bilder ;-)

-
Super Perfekt damit läuft es :-) Danke :-) schönes Wochenende
-
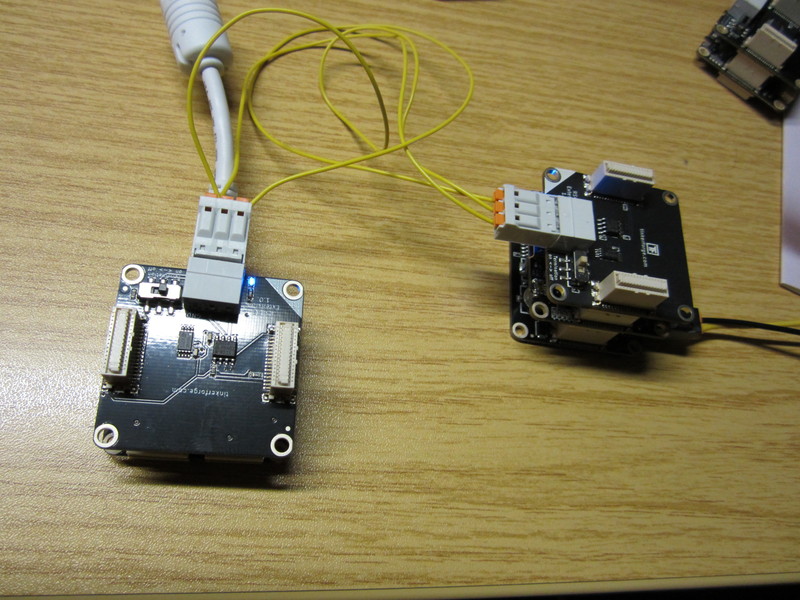
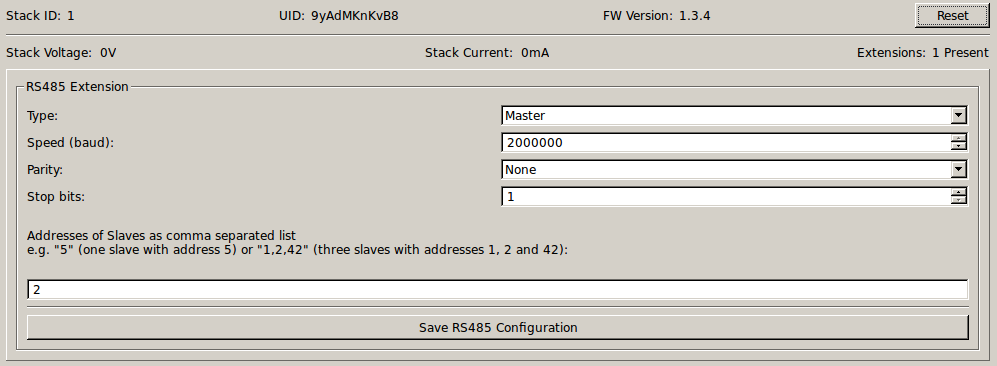
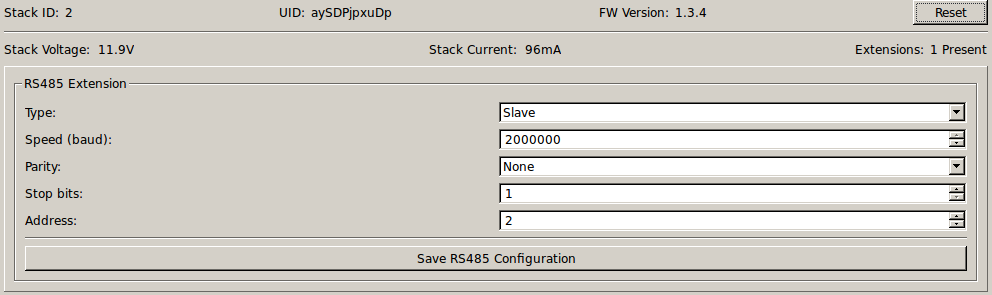
Danke fürs Update ;-) Nein ich habe nur ein Master + RS485 und einen zweiten Stapel Master + RS485 + Step Down. Konfiguration habe ich mal angehängt.
-
Ahh ok ;-) Dann ist ja gut. Hatte schon gedacht irgendwas wäre nicht ok. Gibt es zufällig auch Probleme mit der RS485 Extension? Ich versuche verzweifelt eine Verbindung herzustellen. Aber das will einfach nicht :-(
-
Hallo zusammen, ich habe gerade meine Master Bricks auf Version 1.3.6 aktualisiert. Einzeln funktionieren die Bricks problemlos mit und ohne Bricklets. Habe ich aber jetzt in einem Stapel 2 Master übereinander starten beide dauerhaft neu. Ich habs mit mehreren Bricks probiert und auch schon 3 mal die neue Version eingespielt. Gibt es da Probleme
-
@BorgelMorgel Also im Moment habe ich die Geschwindigkeit auf 400 Schritte/sec (Full) eingestellt. Damit läuft der Motor sehr gut und leise. Ich denke für später kommt die Geschwindigkeit auch sehr aufs Material an. Je härter desto langsamer. @AuronX :-) ja das sind Endschalter, die aus dem TF Shop. Der kurze Stopp gehört dazu ja ;-) Das sind genau 400 Schritte. Ich möchte meinen Anfangs- und Endposition nicht direkt an den Endschaltern machen sondern diese nur für die Initialfahrt nutzen. Danach werden die Endschalter scharf geschaltet. Sollte da dann noch einer auslösen werde ich einen Not-stopp aller Achsen und Motoren einbauen. Dadurch verliere ich zwar 400 Schritte pro Seite (ca. 1cm) aber so kann ich sicher sein das nichts kaputt geht. Bin auch am überlegen ob ich noch ein Relay mit Monoflop einbaue.
-
Soo hier noch ein paar Bilder ;-) http://www.sven-lindeboom.net/?page_id=544
-
Soo hier das versprochene Video ;-) http://www.sven-lindeboom.net/wp-content/uploads/test.mpg
-
Also ich habe alles was ich bis jetzt an Gleitschienen und Spindeln benötigt habe bei http://www.cnc-discount.de/ bestellt. Die Gleitschienen gibts immer in paaren für so ca. 100€ und die Spindeln liegen bei so ca. 70€ bis 90€ Ganz günstig ist es nicht aber es ist halt alles schon fertig montiert das fand ich ganz gut.
-
@FabianB BorgelMorgel hat es schon alles gesagt ;-) es ist ein Schrittmotor mit Kupplung direkt an eine Kugelumlaufspindel. Auf dieser Spindel läuft eine Spindelmutter die den Wagen bewegt. Das mit der Übersetzung werde ich mir auf jeden Fall nochmal ansehen, dass finde ich eine gute Idee. @BorgelMorgel Also als Fräse wollte ich einen alten Dremel verwenden da bekommt man ja fast alle Aufsätze für. Geplant war das ganze für Sperrholz. Ich denke da es aber bis jetzt sehr genau geworden ist worden ist wird da auch einiges mehr drin sein. Cool fände ich eine Möglichkeit Platinen fräsen zu können :-) Aber dafür muss ich dann erstmal Software schreiben ;-) @batti Bilder und Video reiche ich noch nach ;-) Das kann aber etwas dauern bin jetzt erstmal 1,5 Wochen unterwegs ;-)
-
Nachdem ich in dem TF Video diese Fräse gesehen habe ist mir das ganze nicht mehr aus dem Kopf gegangen ;-). Vor einiger Zeit habe ich dann mal angefangen eine zu bauen. Die ersten versuche mit dem Stepper Brick waren erfolgreich und ich habe in Java schon eine Initialisierungsfahrt für die X Achse programmiert :-) Ein bisschen problematisch war dabei, das die ganzen Methoden wie setSteps usw. nicht Blockieren solange der Motor nicht an der angegebenen Position ist. Dazu habe ich mir dann eine eigene Lib gebaut, die mir diese Erweiterungen bereitstellt. Hier gibts auch noch ein paar mehr Bilder ;-) http://www.sven-lindeboom.net/?page_id=91


-
Ja mein Bereich geht so ca von 0 bis -30 bei der genauen Einteilung bin ich mir noch nicht ganz sicher. Als Abdeckung habe ich ein Stückchen Müllbeutelfolie genommen. Aufgestellt habe ich den Sensor in 45° in Richtung Nord. Am Anfang hatte ich in direkt nach oben das Problem dabei ist nur das sich dann nach einem Regen Wasser sammelt. Mir hilft die WiFi Extension leider nicht. Ich warte auf die Ethernet Extension damit könnte ich dann auch sparen ;-) Wobei so ein Raspberry Pi ist auch total ok
-
Hallo, ich suche für ein Projekt einen Schrittmotor den ich mit dem StepperBrick betreiben kann und der ein sehr hohes Drehmoment zum stellen der Welle hat. Die Spindel die ich damit antreiben möchte ist ein bisschen schwer gängig. Hat jemand Erfahrung mit starken Motoren?