

jones5322
-
Gesamte Inhalte
2 -
Benutzer seit
-
Letzter Besuch
Posts erstellt von jones5322
-
-
I'm trying to understand my IMU Brick 2.0. What should the euler angle H be when X is pointing to 360 degrees? Mine is showing 244. (see attached) My firmware appears to be 2.0.9. I have not run any calibration processes.

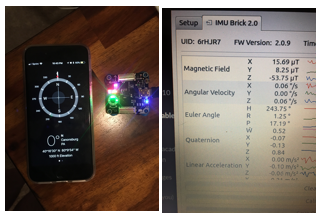
IMU Brick 2.0 accuracy compared to iPhone
in General Discussion
Geschrieben
Using a compass and confirming I was pointing North the euler H reads 259 when IMU x axis is pointing North. Brick View is reporting green on the calibration page.
What is the process for doing a manual calibration? I only see a button to save calibration.
I want to use you IMU in ROS like https://github.com/nxdefiant/ros_wild_thumper/issues/1 Matt Droter and I are working on this together to understand the mounting position and any needed offsets.
imu_testing.pdf