FlyingDoc
Members
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von FlyingDoc
-
Danke für den Hinweis. Habe ich gleich geändert.
-
So. Die versprochenen Bilder.
-
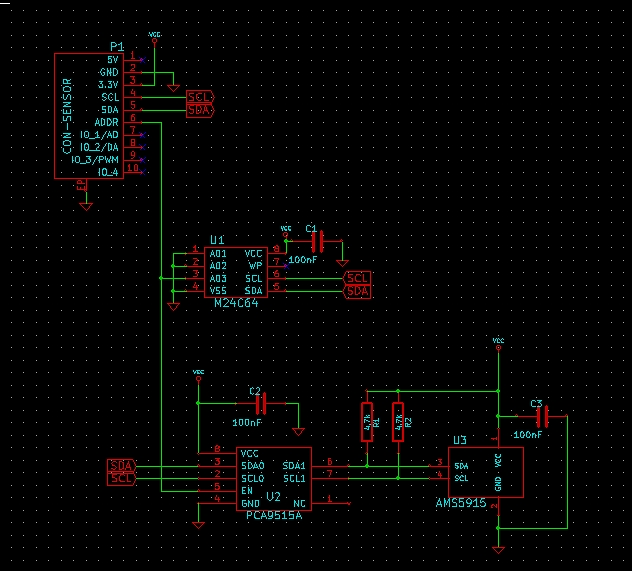
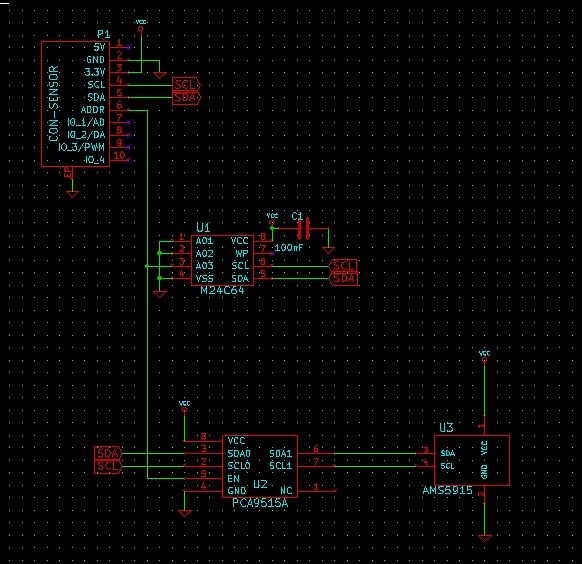
Du meintest warscheinlich PullUp Widerstände. Kein Problem. Wird schnell noch in die Schaltung integriert. Tante Edit sagt: PullUp Widerstände und Abblockkondesatoren in die Schaltung eingefügt und alle Bauteile ausser dem Sensor auf der Platine auf die Lötseite verschoben. Platine wird dadurch kleiner und es spart warscheinlich Durchkontaktierungen. Muss sowieso sehen wie ich die Platine herstellen kann. Bilder folgen noch!
-
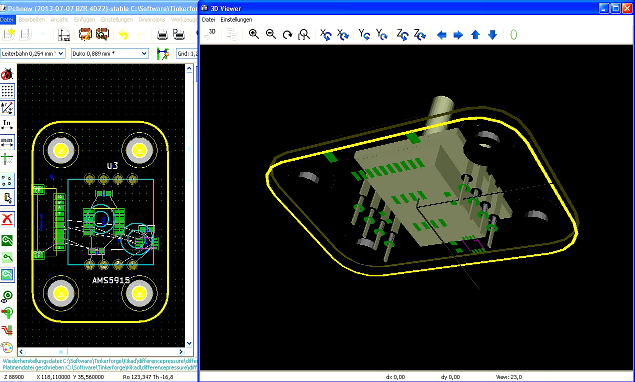
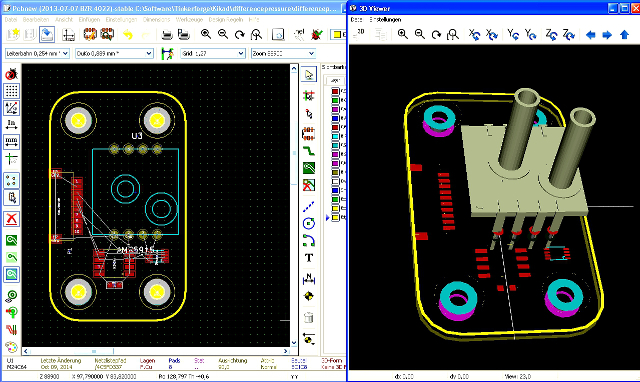
So. Mal ein Update. Fummle mich gerade beim KiCad rein. Hier mal der Projektstatus vom Differencepressure Bricklet.
-
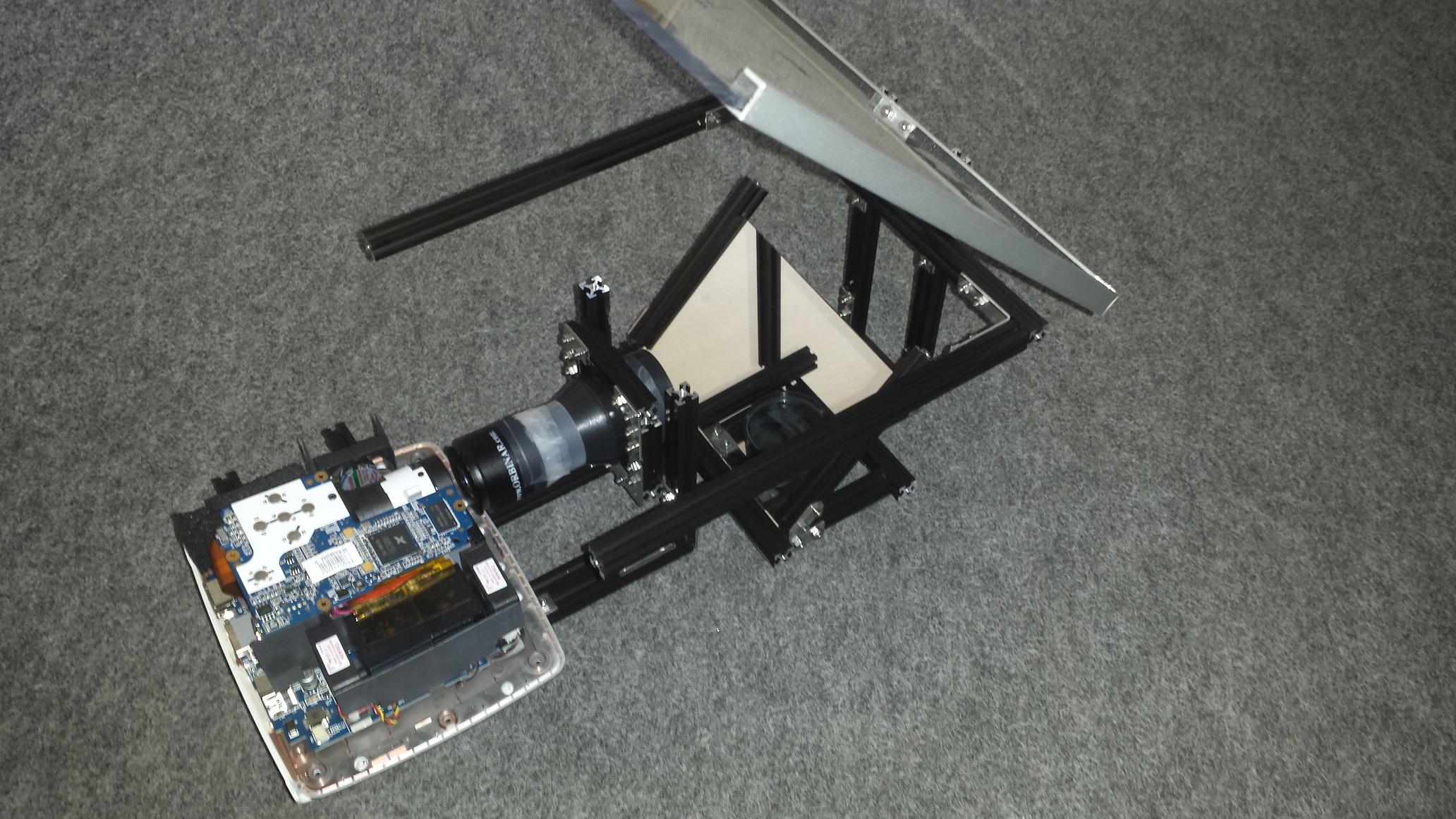
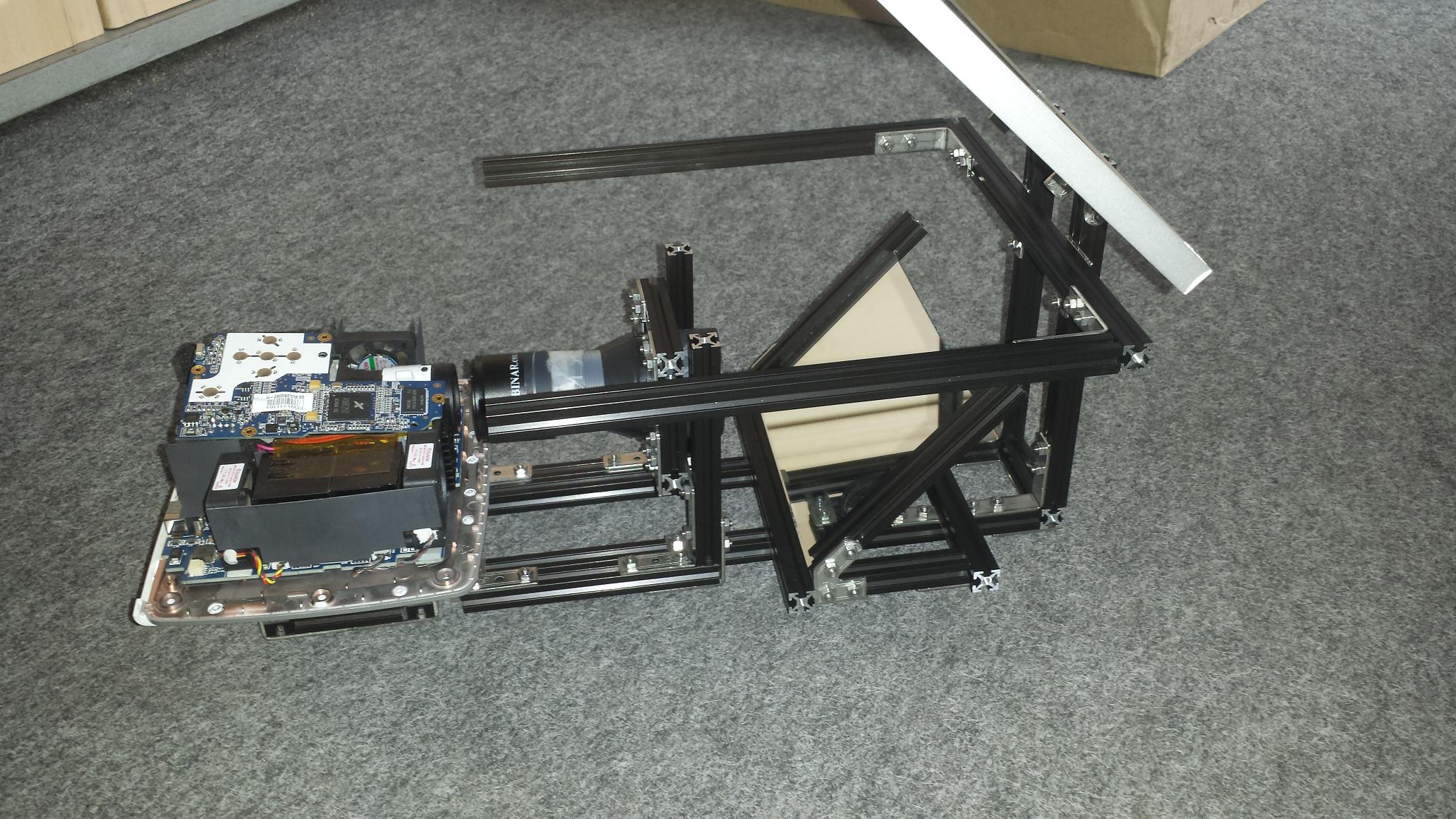
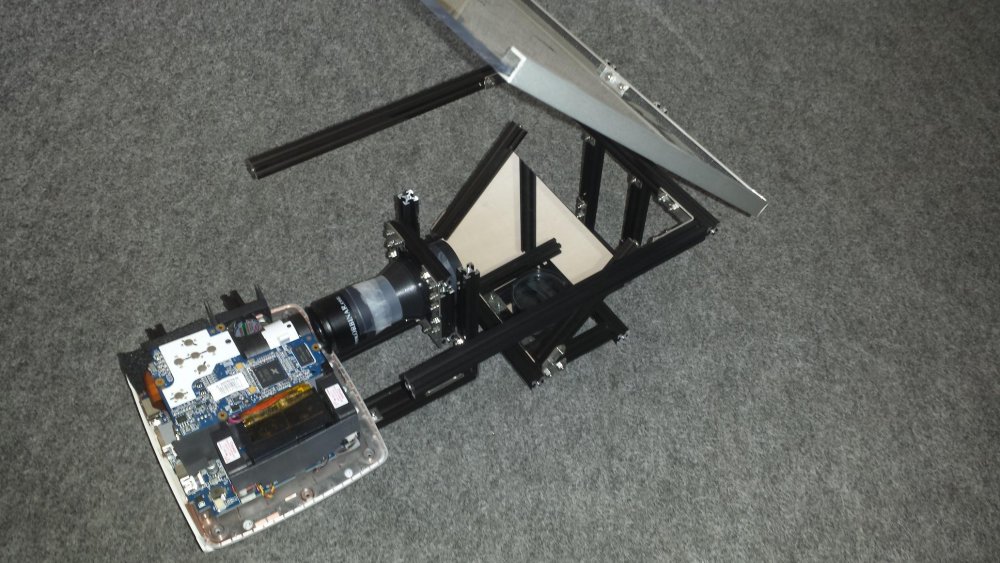
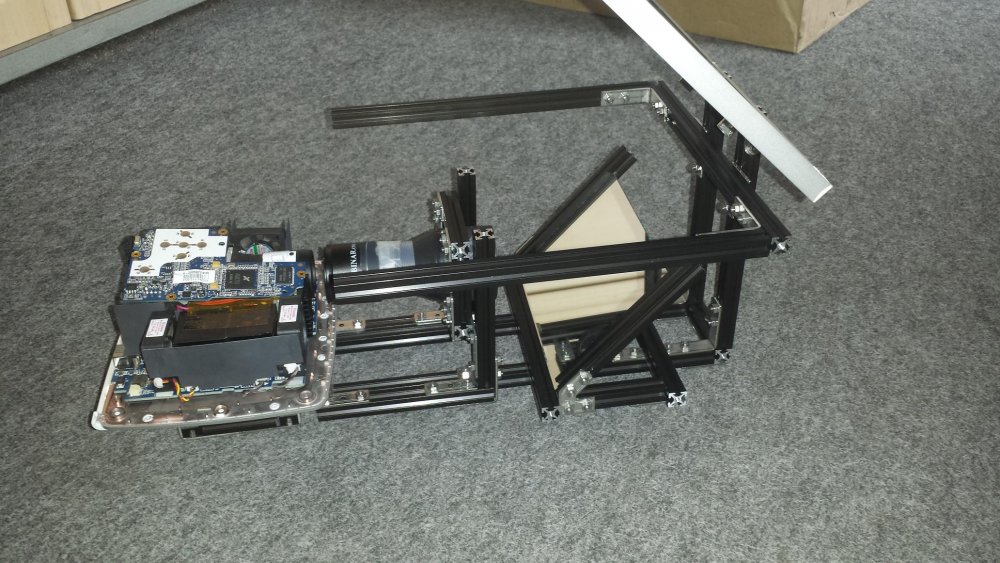
Update. Nach dem ich ein MakerBeams Starterkit mein eigen nennen konnte hab ich mir schnell mal ein Testgestell zusammengefrimmelt. Klappt sehr gut. Damit kann ich jetzt die Achsen einstellen und die Abstände varieren. Hab nur ein Problem. Mir sind schon Teile ausgegangen. Muss also nachordern. Die Linsen will ich noch einzeln einklemmen können. Im Moment hängen sie im Verbund. Und dank Bastians Hilfe habe ich inzwischen meinen Digitalen Differenzdrucksensor (AMS 5915-0100-D) da und entwickle gerade ein Bricklet damit. Danke noch mal für deine Hilfe.
-
Ein Differenzdrucksensor Bricklet. Aso. Das bastle ich gerade selber. hab gestern meinen Sensor bekommen.
-
Miniupdate. Heute mal das Barometerbricklet gekapselt, damit es an mein Statischen Druck angeschlossen werden kann. Diesen entnehme ich von meinem neuen Pitot Rohr. Frei nach einem alten Sprichwort aus DDR zeiten. Und sollte es nicht dichte sein, so schmiere Cenusil hinein.

-
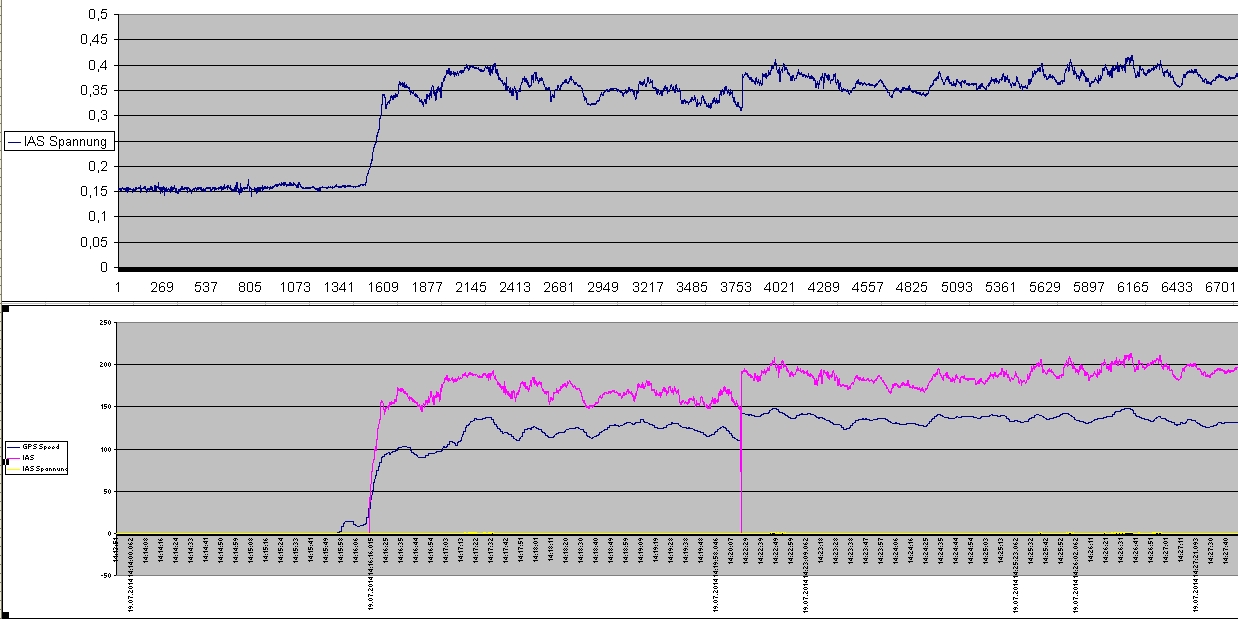
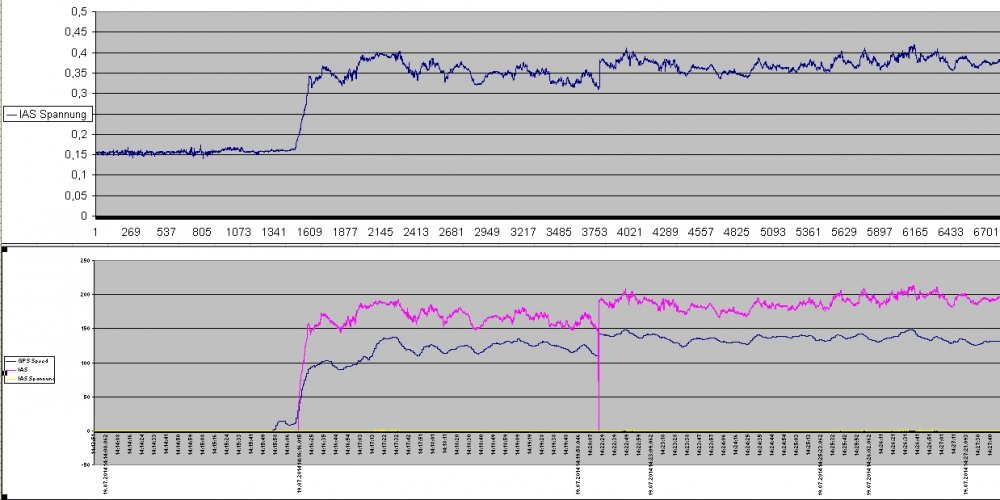
Und hier noch ein Diagramm aus meinen Recorddaten. Sie zeigen die Geschwindigkeit mit GPS und analog gemessen an und die vom Sensor gelieferte Spannung. Beim "Ausrutscher im zweitem Diagramm war mir das Programm ausgegangen nach dem ich mit irgend etwas auf dem Laptop gekommen bin und das Programm beendet hab. Naja. der Schleptopf saß ja neben mir auf dem PAX Sitz und es war etwas beengt.
-
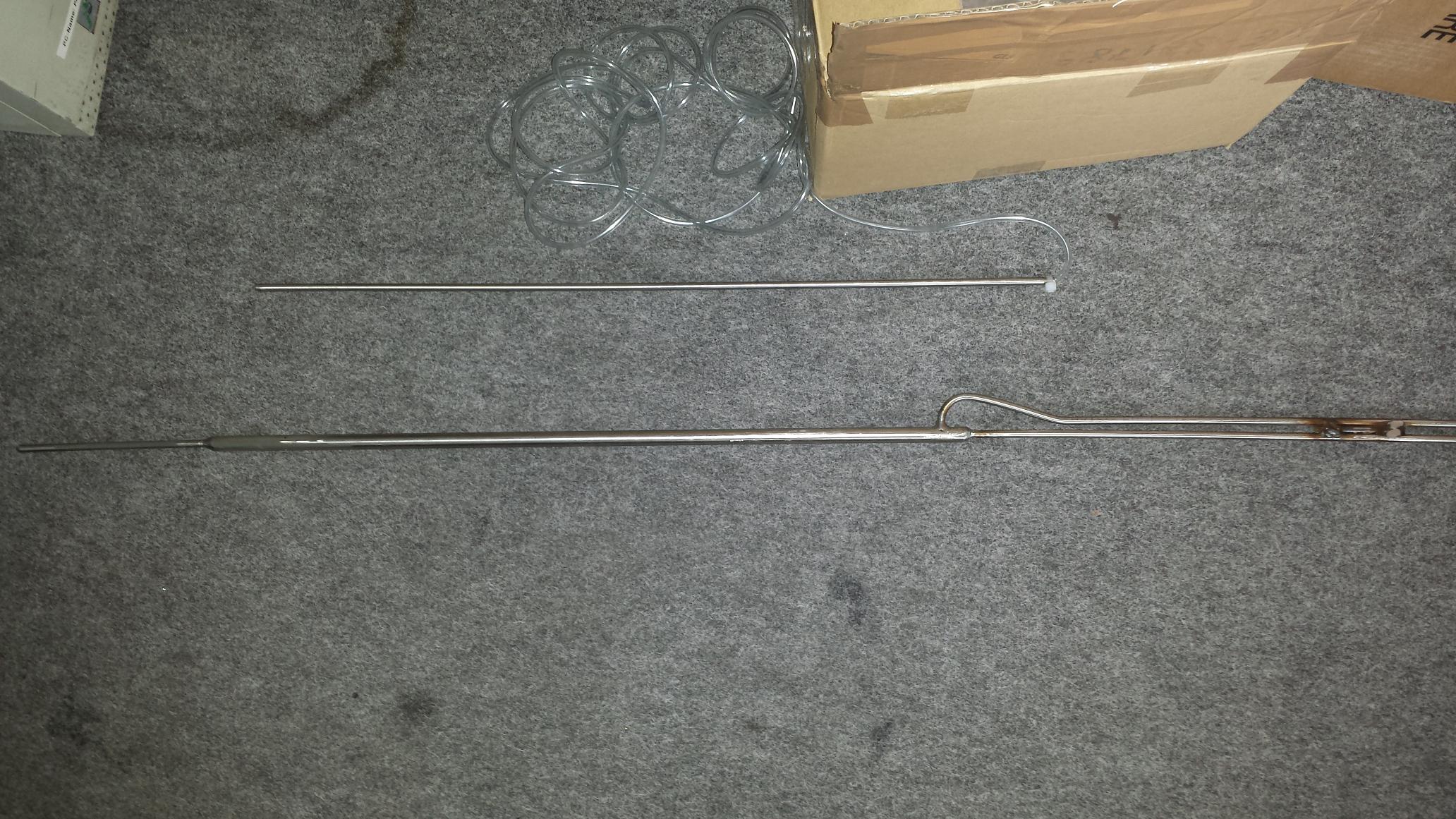
So. Nach den Erfahrungen beim ersten Testflug habe ich mir ein neues Staurohr (Pitot Rohr)gebaut. Es erlaubt mir, sowohl den statischen Luftdruck als auch den Staudruck abzugreifen. Es ist noch nicht ganz fertig. Muss noch etwas verschleifen. Auf dem ersten Bild ist das Rohr für den Statischen Luftdruck zu sehen bevor das eigentliche Staurohr eingebaut wird. Es hat seitlich 4 kleine Bohrungen für den Luftdruck und am Ende eine große Bohrung für den Anschluß wo ein kleines Rohr eingeschweist wird. Auf dem 2. Bild sind sowohl das Alte als auch das Neue zu sehen. Die Gröe ist der Montagemöglichkeit für den Test geschuldet, Ich kann es auch kleiner bauen, aber dann kann ich es nicht so einfach mal schnell anbauen.


-
Nein. DIe Optik ist ja auch noch lange nicht fertig. Hab hab ja nicht so viele Linsen wie ein optisches Labor zu Verfügung. Ausserdem bin ich kein Wissenschaftler/Ingeneur im Bereich Optik und hab nicht das Wissen um mir sowas aus dem Handgelenk zu schütteln. Das Bild ist noch viel zu klein um es benutzen zu können. Das hier war nur der erste "Ausflug" für die Sensorbox mit dem Schleppie als PAX zum testen und Daten aufzeichnen.
-
Update: Heute mit dem Flieger unterwegs gewesen und die Sensorbox getestet und Daten aufgezeichnet. Hier mal ein paar Bilder. Auf dem ersten ist das Staurohr zu sehen. Im 2. ist die Sensorbox zu sehen. Hab sie einfach mal vorn reingelegt und mit Klebeband fixiert.



-
Also mit einwm Multimeter kann man Daten und Taktleitungen nicht messen. Dazu brauch man scon eine Osziolographen.
-
Schon gesehn.THX
-
So. Gerade zum testen gekommen. Alles i.o.
-
Mit den neuen Bindings kommt es beim Compilieren zu einem Fehler unter QT Wenn ich in ip_connection.cpp folgend Funtion auskommentiere geht alles wieder.
-
% antwortete %s in: Software, Programmierung und externe ToolsIch tippe mal auf den Motion Detector Bricklet.
-
Wegen dem Zittern des IMU musst du mit dem Convergencepeed probieren. Je mehr er gegen 0 geht um so ruhiger wird das ganze. Habe aber dabei ein Phänomen bemerkt. Einmal drifftet der Wert stark wenn er fast 0 ist , ein ander mal steht er wie ein Ast und reagiert verzögerungsfrei auf jede Bewegung ohne zu driften. Hab noch nicht herausgefunden woran das liegt. Ich kann der Convergencepeed bei mir im laufenden Betrieb über ein Menu anwählen und mit dem Rotary ändern.
-
So. Da ich im Moment mit der Optik noch nicht weiter bin hab ich mal im Programm schnell die GPS Navigation integriert. Die Programmteile hab ich aus meinem alten PDA Programm "Flightrecorder" übernommen, das ich schon vor Jahren geschrieben und benutzt habe. Die Navigation stimmt also. Bin ja auch da angekommen wo ich hin wollte.
-
So. mal ein Lebenszeichen von mir. Das Projekt lebt noch. Bin aber mit der Optik beschäftigt. Am Wochenende war ich auf der ILA. Da hab ich mir mal das HUD eines Tornado genauer angeschaut um zu sehen was ich da verbessern kann. Aso. Die Organisation der ILA war gut. Vom Parkplatz zur ILA gab es kostenlose Shuttle. Hier mal ein Bild vom Einsteigen.


-
Hostadresse und Port kann man ja so angeben. 192.168.2.10:587 und daneben oder darunter das Secret Feld das automatisch mit der gewählten Position im Adressfeld mitblättert. Alles ohne großen Aufwand machbar.
-
Also mit einem ordentluchen Lötkolben mit der richtigen Lötspitze (spitz) ist das kein Problem. (ja ja hab gut reden als ausgebildeter Elektroniker )
-
Ich hab mit Pi ins Auge gedrückt.
-
Das Bild ist scharf. Aber noch zu klein. Hab heute Morgen noch mal ein Paar Fotos versucht. Da erkennt man wenigstens etwas. Aber sind etwas unscharf. Naja. Bin halt kein Profifotograf. Und die Optik betsetht im Moment noch aus nem Okular + einer Leselupe. Die passenden Linsen muss ich erst noch besorgen. Ist ja alles noch im "Test".

-
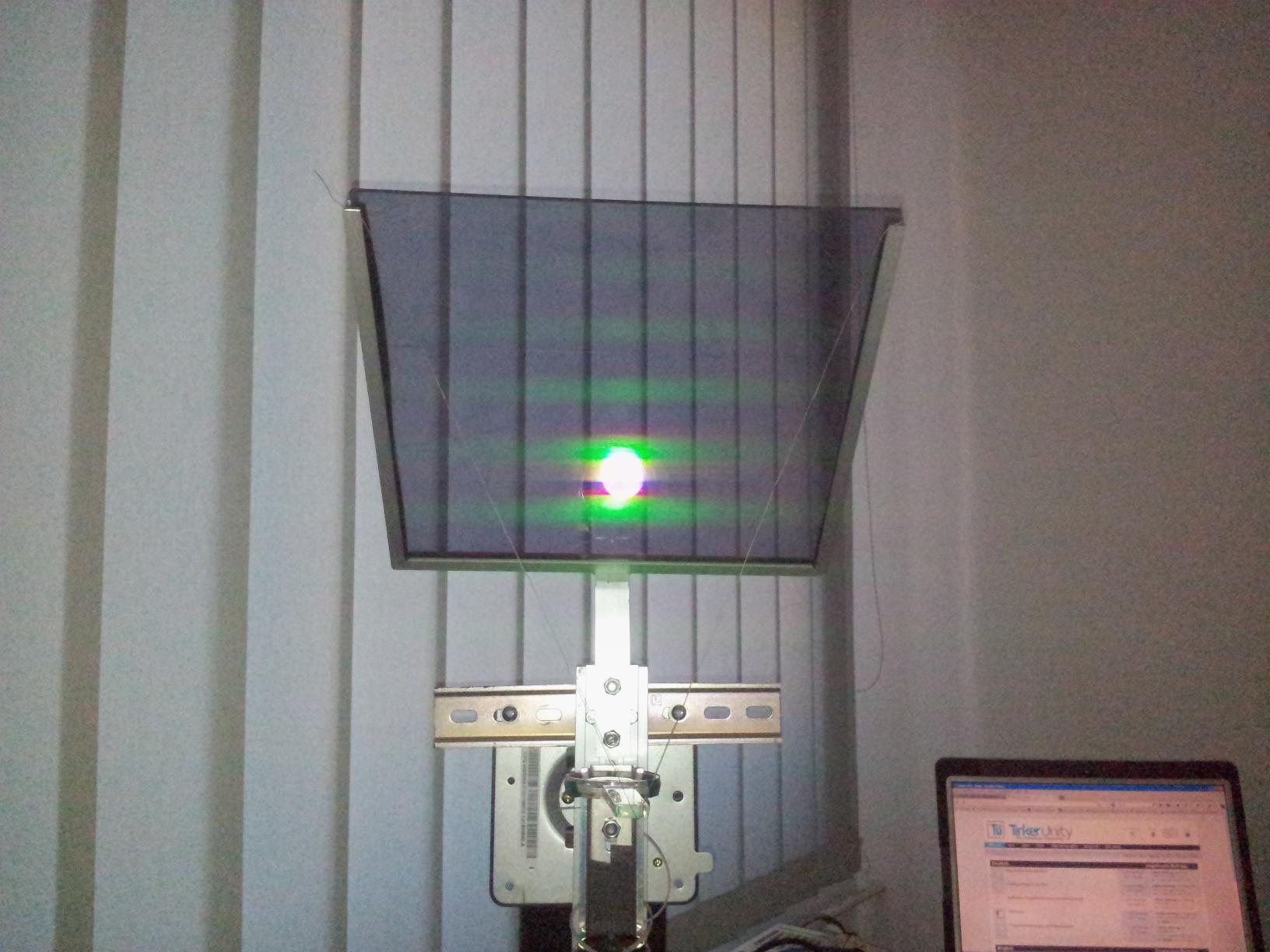
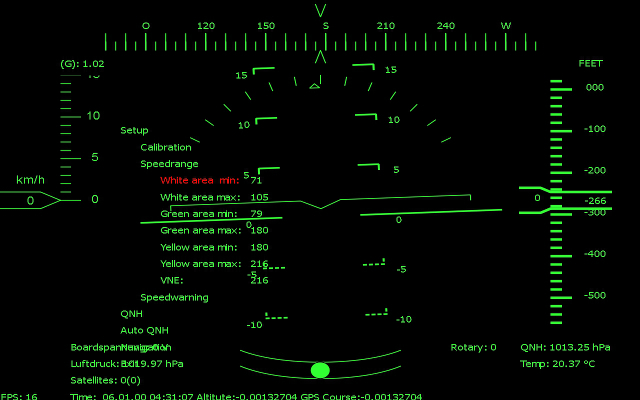
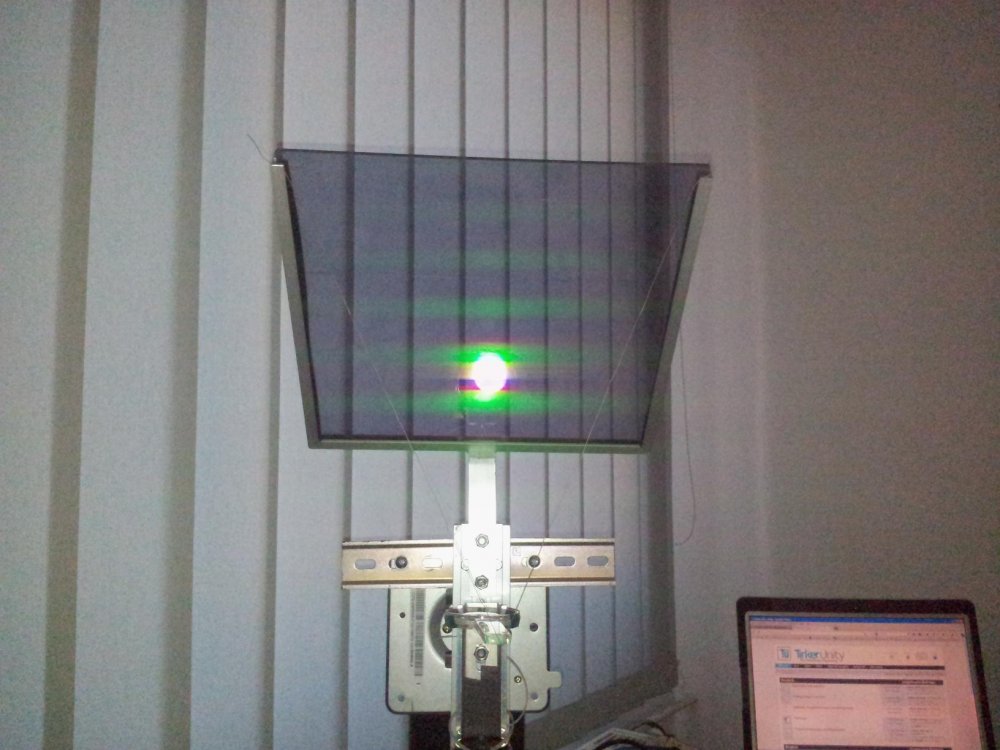
Ubdäd Menü weiter gemacht. Aktueller Screen dazu. Die Geschwindigkeitsbereiche für den Weißen,Grünen,Gelben Bereich und VNE können jetzt im Setup eingestellt werden. QNH und Auto QNH sind auch integriert. Navigation ist noch nicht eingebaut. Das ganze Menü wird nur mit dem Rotary Bricklet bedient. Und an der Displayhardware hab ich auch rumgefus... ähm probiert. Hab mir mal ne Halterung gebaut. Auf dem Foto leider nix zu erkennen da es zu sehr blendet. Und da habe ich die Helligkeit schon runter gedreht. Die Eyebox ist auch noch zu klein. Naja. Sind ja noch die Anfänge. (Aber auf das Problem hatte mich der Prof. schon hingewiesen.) Das virtuelle Bild liegt aber schon hinter der Scheibe. Die Helligkeit ist so stark das man stark geblendet wird wenn nicht reduziert wird. Hab schon nen Graufilter davor und im Beamer runtergedreht. Die Lesbarkeit bei Sonnenlicht ist daher sicher zu erreichen.
-
Den Master musst du zum Updaten erst in den Bootloader Modus bringen in dem du beim Einschalten den Clear Button gedrückt hälst. Erst dann kannst du die Firmware Updaten.