FlyingDoc
Members
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von FlyingDoc
-
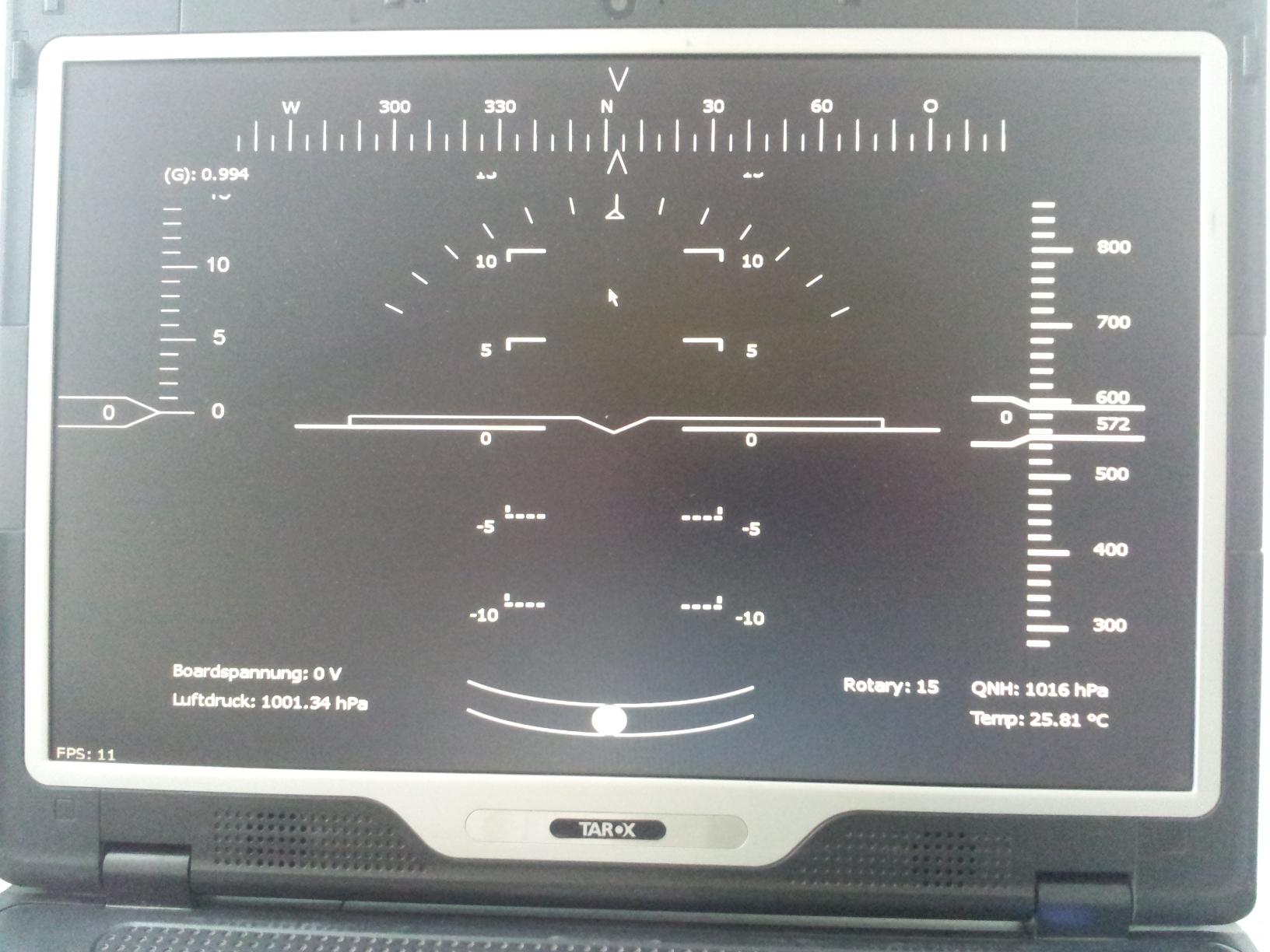
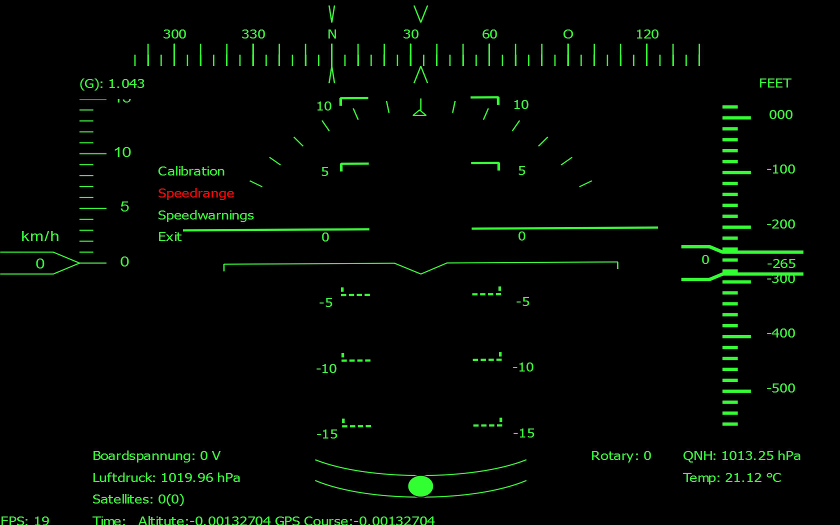
Kleine Aktualisierung des Projektstandes. Baue gerade die Setupfunktion ein. Diese kann nur aktiviert werden wenn der Setupswitch auf ON ist. (Eingang am IO16) Das Setup wird dann durch Betätigen den Rotarybutton aufgerufen. Es erscheint dann das Setupmenu das komplett über den Rotary Bricklet bedient wird. Das jeweilige Untermenu anwählen und mit betätigen des Knopfes auswählen und dann weiter. Zurück jeweils mit der Exit Funktion. Hier mal ein früher Screenshot.
-
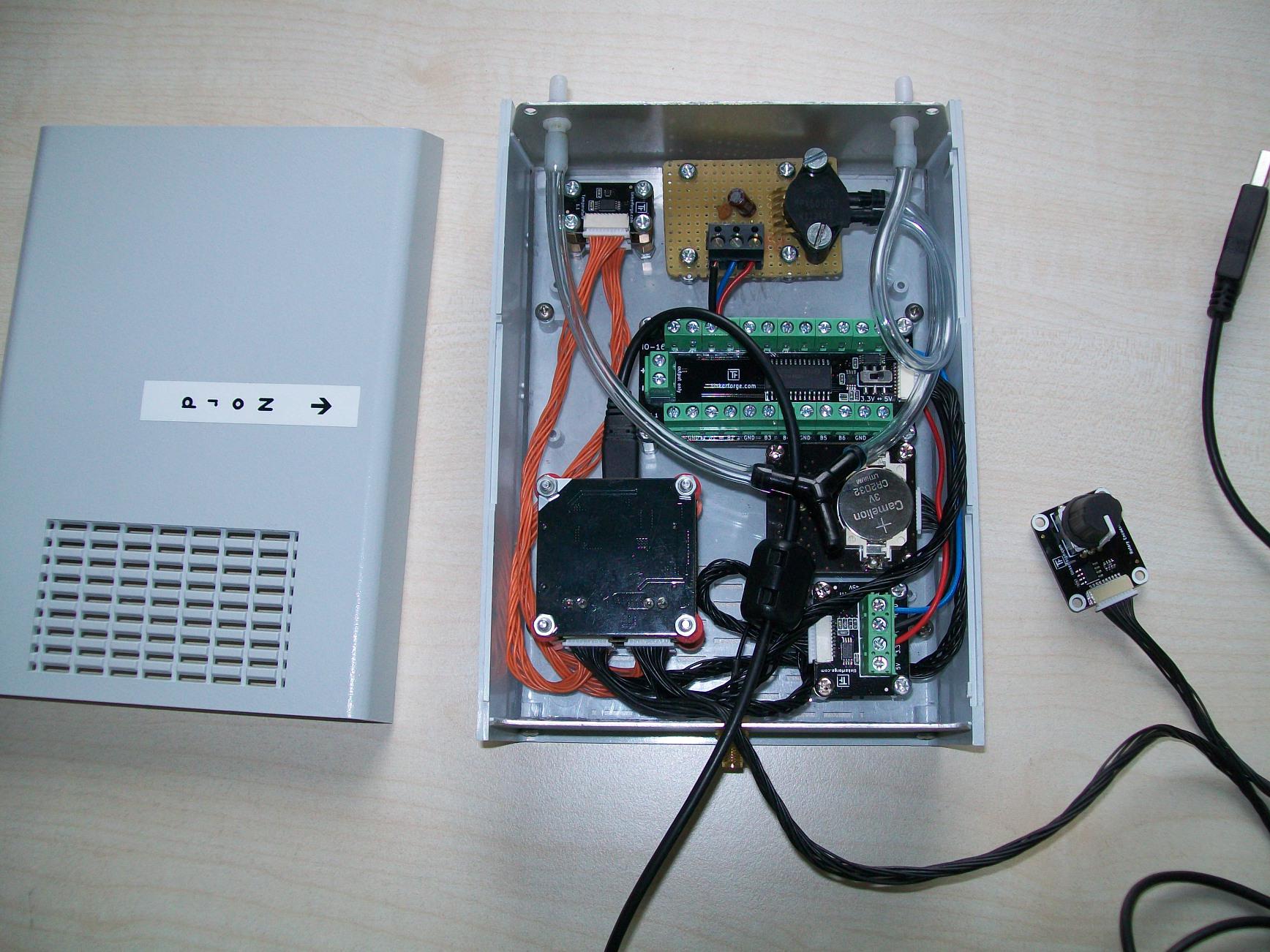
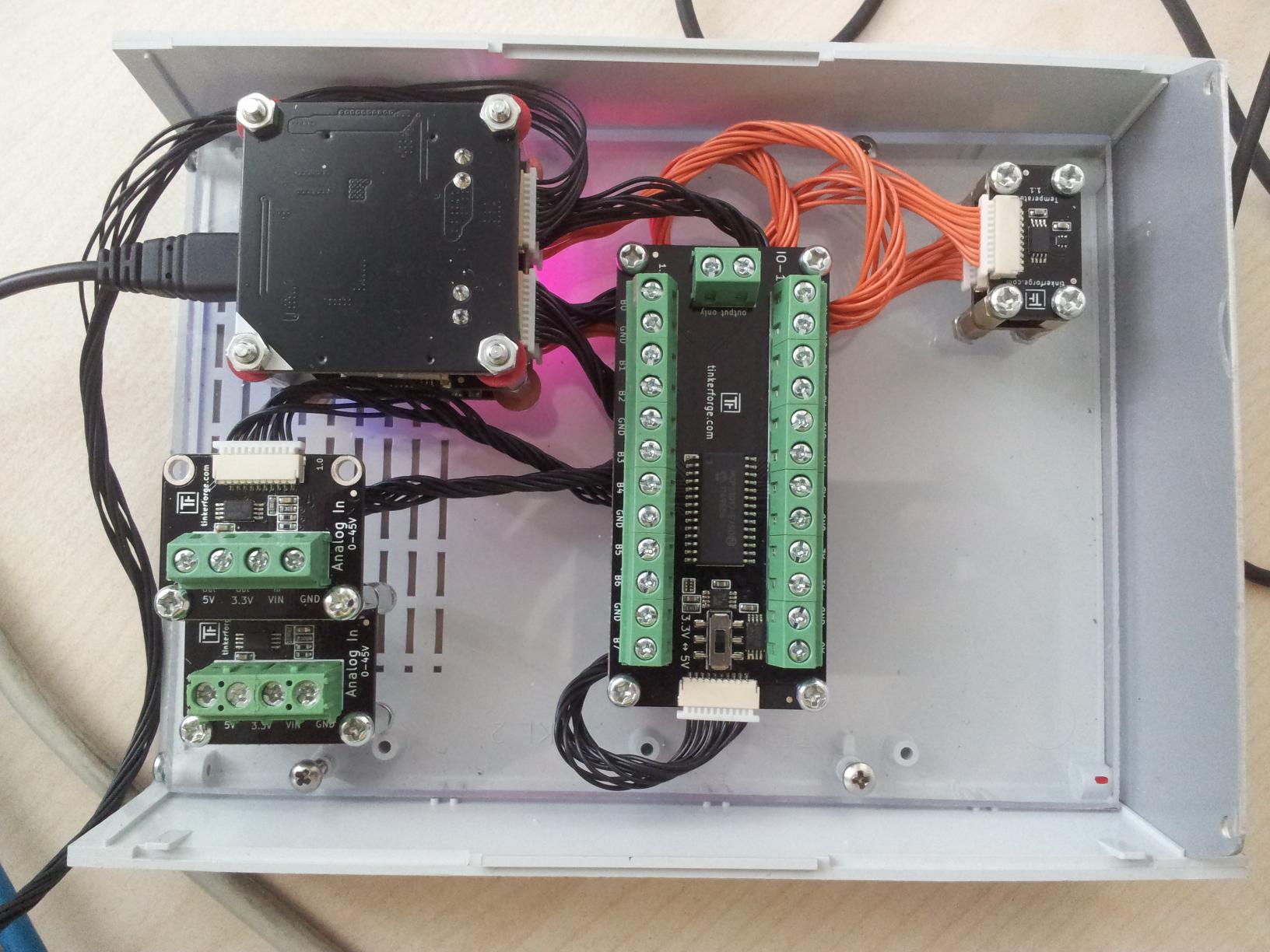
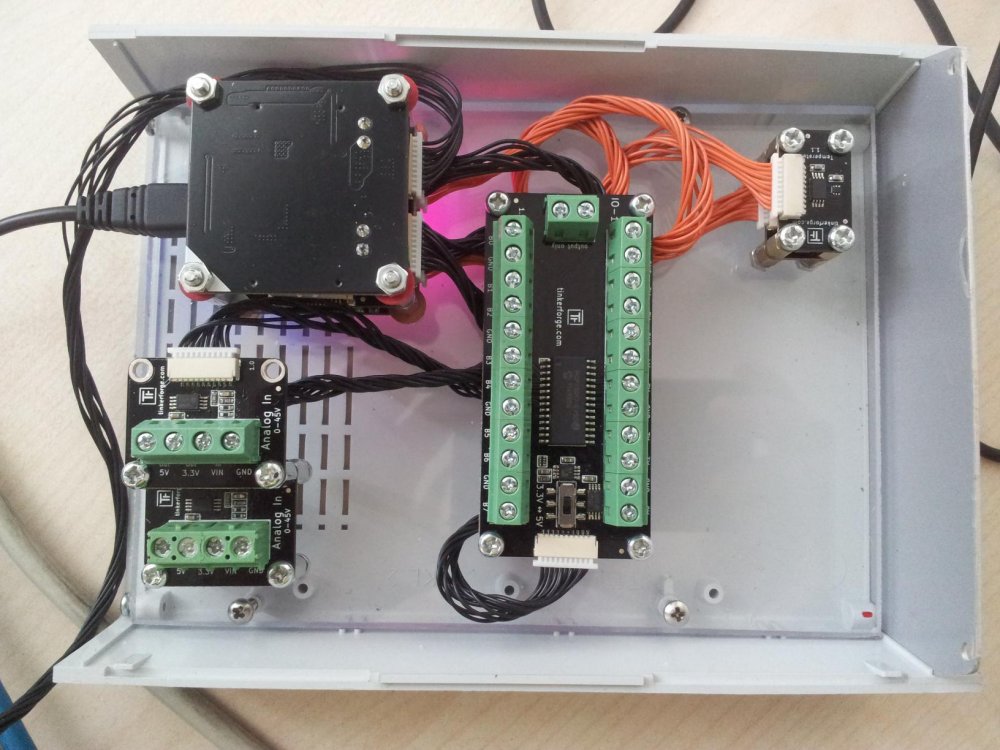
Na der hier. Der Stack sieht folgendermaßen von unten nach oben aus. [*]Step-Down Power Supply [*]Master [*]IMU Daran sind angeschlossen. Am Master [*]IO-16 Bricklet [*]Rotary Encoder Bricklet [*]Analog In Bricklet --> Geschwindigkeitsmessung [*]GPS Bricklet Am IMU [*]Temperatur Bricklet [*]Barometer Bricklet --> Höhenmessung
-
Hier mal den aktuellen Stand der Sensorbox. Differenzdruck (Geschwindigkeitsmessung) noch über Analogsensor am AnalogIn Bricklet. Soll noch gegen Digitalsensor auf Bricklet(veränderter Barometer Bricklet) ersetzt werden. Und der Barometer Bricklet ist auch noch nicht gekapselt.


-
Grade getestet. Futzt jetzt. THX. Bei so ne schnelle Reaktion kann sich manche Firma ne dicke Scheibe abschneiden.
-
Huch. Ich klinke mich mal mit ein. Hab das gleiche Problem unter C++. Ich kann die Portconfiguration nicht setzen. Im Brick Viewer funktioniert alles. Im Programm nicht. void Create_IO16(const char* device_uid, uint8_t device_identifier, const char *connected_uid,char position, bool is_new) { /****************************************************************************/ /* IO-16 Bricklet einbinden */ /****************************************************************************/ UID = strdup(device_uid); if(UID) { /****************************************************************************/ /* IO-16 Bricklet erstellen */ /****************************************************************************/ if(!Io16_Brick) { Io16_Brick = new IO16(); } io16_create(Io16_Brick, device_uid,ipcon); /****************************************************************************/ /* IO-16 Bricklet zur IP Connection hinzufügen */ /****************************************************************************/ window->Set_Connectionstatus(true,IO16_BRICKLET,device_uid); /****************************************************************************/ /* Ausgabegeschwindigkeit einstellen in ms */ /****************************************************************************/ // printf("Periode %d\n",Periode); io16_set_debounce_period(Io16_Brick, 100); /****************************************************************************/ /* Temperature Bricklet Callback erstellen */ /****************************************************************************/ io16_register_callback(Io16_Brick,IO16_CALLBACK_INTERRUPT , (void*)cb_Io16interrupt,Io16_Brick); io16_set_port_configuration(Io16_Brick,"a", 255, IO16_DIRECTION_IN,true); io16_set_port_configuration(Io16_Brick,"b", 255, IO16_DIRECTION_IN,true); io16_set_port_interrupt(Io16_Brick, 'a', 255); io16_set_port_interrupt(Io16_Brick, 'b', 255); } }
-
Im Moment benutze ich auch einen MPX Sensor am AnalogIn zur Geschwindigkeitsmessung. Nur will ich gerne diese Messung auch direkt digital auslesen. Dazu eignet sich der oben erwähnte Sensor. Mann muß nur das Barometer Bricklet damit ausstatten und die Software etwas anpassen.
-
kleines Update: Beim Programm bringe ich gerade die Kalibrierung ein. Wenn die Sensorbox in den Flieger gebaut wird muss sie einmal kalibriert werden. Also die ganze Maschine auf einer freien Fläche in Fluglage gebracht werden und Richtung Nord ausgerichtet sein. Die Daten des IMU werden dann auf Knopfdruck in der INI hinterlegt. Weiterhin bin ich am überlegen mir einen Barometerbricklet umzubauen in einen Differenzdruck Bricklet. Dazu müsste ich in der Schaltung nur den eigentlichen Sensorbaustein ersetzen gegen einen Differenzdrucksensor mit Schlauchanschlüssen. Die Firmware müsste auch noch angepasst werden. Währe auch ein Ideenvorschlag fürs TF Team. Einen Differenzdruck Bricklet anzubieten. Zaunspfahl wink Zum Beispiel den AMS 5915 Beim optischen Sytem bin ich noch am testen. Ein Ocular und einen Filter hab ich schon und suche nun das passende Fotoobjektiv mit f'=50 (od. 80).
-
$ipcon = new IPConnection(); // Create IP connection $al = new BrickletAmbientLight(alUID, $ipcon); // Create device object $hu = new BrickletHumidity(huUID, $ipcon); // Device Object für Humidity $ipcon->connect(HOST, PORT); // Connect to brickd Du verwendest die IPConnection schon bevor diese überhaupt hergestellt wird. Tausch mal deine Zeilen so um $ipcon = new IPConnection(); // Create IP connection $ipcon->connect(HOST, PORT); // Connect to brickd $al = new BrickletAmbientLight(alUID, $ipcon); // Create device object $hu = new BrickletHumidity(huUID, $ipcon); // Device Object für Humidity
-
% antwortete %s in: Projektvorstellungen und ProjektideenAuf alle Fälle sollte er sie spätestens jetzt bei sich ändern.
-
So. Mal die ersten Versuche mit dem Beamer angestellt und schnell ein Testgestell gebaut. Aber noch ohne Linsensystem um das ganze virtuell in die Entfernung zu schieben. Festgestellt habe ich auch das die Reflektion auf dieser "Plastescheibe" um einiges geringer ist als auf einer Glasscheibe mit der gleichen Folie. Aber eine Glasscheibe in der Größe habe ich noch nicht. Ausserdem spiegelt der Beamer noch mächtig, wie auf dem Foto zu erkennen ist.


-
Ich wünsche dem gesamten Team von Thinkerforge und seinen Usern ein gesundes neues Jahr, weiterhin viel Erfolg und viele Ideen !
-
Heute Post bekommen. Gerade mal schnell den Inhalt angeschaut. Geil. Zwar etwas laut der Lüfter. Aber im Flieger ist der Ventilator lauter. Und die Projektionsschräge lässt sich auch gut einstellen. Morgen mal in Ruhe zu gemüte führen.
-
Neue Funktion eingebaut. Automatische QNH Einstellung auf Tastendruck. Encoder Taste min. 2 Sekunden gedrückt halten wird der QNH automatisch eingestellt. Wird errechnet nach GPS Höhe und aktuellem Luftdruck. Funktioniert also auch im Flug.
-
Erstmal muss ich dann einen Versuchsaufbau basteln. Dann muss ich mit der Optk probieren. Hatte extra den Prof. Dr.-Ing. Peter Ott von der Hochschule Heilbronn kontaktiert, weil er HUD als Studienobjekte hat und hatte, und er hatte mir Tipps gegeben. (danke mal im Vorraus) Wegen der Linsen mach ich mir die wenigsten Sorgen. Ich baue und betreue hier bei uns im Betrieb das Videonetzwerk. Hardwaretechnisch und Softwaretechnisch (<Angebermodus ON>Software ist von mir <Angebermodus OFF>) Den Grungaufbau hab ich im Kopf. Mal sehen wie ich es umsetzen kann.
-
So Beamer steht fest. Es wird jetzt der Acer K135
-
Neuer Stand. Besorgung eines Pico Beamers hat begonnen. Mal sehen welcher es wird. Entweder der ACER K135 oder der Optoma ML550. Beide mit 500 lumen. Scheint die selbe Hardware zu sein wobei das Gehäuse vom ML550 kleiner ist in der Breite. Ansonsten hab ich das GPS Modul ins Gehäuse eingebaut und eingebunden. Warte noch auf de externe 5m lange GPS Antenne wegen dem Empfang im Haus zum Testen. Im Moment integriere ich die Daten des Moduls. Uhrzeit, Satelliten e.t.c.. Für die Navigationsmöglichkeit. Ist kein Problem. Hab ich bei meinem PDA Programm schon gemacht , was ich schon einmal geschrieben und benutzt hab. Muss nur die Routinen anpassen.
-
Du brauchst für den Stapel 2 Master (1 Master für 4 Brickleds). Für die Stromversorgeng nimmst du am besten den StepDown Power Sluppy. Dann bist du bei der Stromversorgung ziemlich frei in die Eingangsspannung. Also 2 Master 1 StepDown 1 Wifi Extension 1 Humidity Bricklet 1 Temperature Bricklet (Luftfeuchtigkeit) 3 Moisture Bricklet (Bodenfeuchtigkeit) wenn ich das richtig verstehe Dazu noch 1 Master + Wifi Extension oder einen PC mit WiFi
-
So. QNH Einstellungüber den Rotary Encoder ist fertig. Zum Einstellen des QNH einmal auf den Rotarybutton drücken. QNH wird groß ind HUD Mitte angezeigt (nich zu übersehen ). QNH einstellen über Rotary. Button nochmal drücken. Der große QHN wird wieder deaktiviert und normal klein angezeigt.
-
Rotary Poti gegen Rotary Encoder ausgetauscht. Jetzt stellt sich der QHN etwas besser ein. Will jetzt auch noch mit dem Knopf arbeiten. Einmal drücken QNH ändern ein. QNH wird groß im HUD eingeblendet. Nochmal drücken. Änderung wird übernommen und wieder normal dargestellt.
-
Encoder bestellt und neue Bindings gezogen. Jetzt kann ich die QNH Einstellung besser machen.
-
Also ich reserviere mir schon mal den Encoder Bricklet.
-
Projektbeschreibung aktualisiert
-
So. Mal ein winziges Updäd. Hardware teilweise in die Box gequetscht. An der Oberfläche noch etwas gefeilt. In der Speedbar werden jetzt die im Fahrtmesser üblichen Markierungen für VNA, gelben, grünen und weißen Bereich angezeigt. Diese werden über eine Ini einstellbar gemacht. Ebenfalls eingebaut ist jetzt die einstellbare Kompensation des Kompass.

-
In unseren Meetingräumen benutzen wir auch solche Beamer. Die Anlagen liegen in unserem Zuständigkeitsbereich. Ich sitze nämlich in der IT Abteilung. Ich kenn das also. Wo projeziert euer Beamer denn hin. Habt ihr eine spezielle Beamerleinwand oder schmeist ihr es einfach an die Wand? Das macht schon einiges aus. Ausserdem kommt es auch darauf an , wie weit weg der Beamer von der Projektionsfläche entfernt ist. Bei meinem HUD wären es max. 30cm. In so einem Meetingraum sind es da schon mehr als 2-3m.
-
Das muss ich herausfinden. Ich hab aber im Mädchenmarkt schon mal einen Picobeamer mit 80 Lumen gegen die Säule "geworfen" . Ich weis das Kunstlicht kein Vergleich ist, aber bei der Entfernung vom Beamer zur Projektionsfläche was es doch sehr Hell trotz gut beleuchteter Umgebung. Und aktuelle HUD benutzen auch nur Katodenstrahlröhren oder TFT als Bildquelle.