FlyingDoc
Members
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von FlyingDoc
-
Aber bitte schön. systemctl status -l eGTouch â— eGTouch.service Loaded: loaded (/etc/init.d/eGTouch.sh; generated; vendor preset: enabled) Active: failed (Result: exit-code) since Tue 2017-12-19 06:50:44 CET; 1h 10m$ Docs: man:systemd-sysv-generator( Process: 1130 ExecStart=/etc/init.d/eGTouch.sh start (code=exited, status=203$ Dec 19 06:50:44 red-brick systemd[1]: Starting eGTouch.service... Dec 19 06:50:44 red-brick systemd[1]: eGTouch.service: Control process exited, $ Dec 19 06:50:44 red-brick systemd[1]: Failed to start eGTouch.service. Dec 19 06:50:44 red-brick systemd[1]: eGTouch.service: Unit entered failed stat$ Dec 19 06:50:44 red-brick systemd[1]: eGTouch.service: Failed with result 'exit$ journalctl -l -u eGTouch -- Logs begin at Thu 2016-11-03 18:16:44 CET, end at Tue 2017-12-19 08:03:01 CE$ Dec 19 06:50:44 red-brick systemd[1]: Starting eGTouch.service... Dec 19 06:50:44 red-brick systemd[1]: eGTouch.service: Control process exited, $ Dec 19 06:50:44 red-brick systemd[1]: Failed to start eGTouch.service. Dec 19 06:50:44 red-brick systemd[1]: eGTouch.service: Unit entered failed stat$ Dec 19 06:50:44 red-brick systemd[1]: eGTouch.service: Failed with result 'exit$
-
Also ich bin kein Freund von diesem Cloud Gedöns. Alles Marketinggeschwurbel zum Geldverdienen. OK. Um seine lokalen Werte da gespiegelt abzulegen ja. Aber das muss völlig losgelöst von den lokalen System funktionieren. Schon garnicht irgendwelche Logiksachen auslagern. Dann stehst du sofort auf dem Schlauch wenn deine Internetverbindung klemmt oder der Clouddienst deines Vertrauen offline oder gehackt ist. Ich habe bei uns im Betrieb (Stahl & Walzwerk) die Programme für die Produktionsdatenerfassung im Walzwerk und bei den Drahtwerken geschrieben. Schon da habe ich von Anfang an (2001) die Übertragung der Daten komplett vom Waageprogramm abgekoppelt. Das Waageprogramm läuft komplett als lokale Insel und schreibt seine Daten in eine lokal auf dem Rechner befindliche Datenbank. Ein 2. Programm ,das nur für den Datenabgleich da ist, überträgt die Daten in die große Datenbank auf unserem Server. Der steht auch bei uns in der EDV und nicht in einer Wolke im Internet. Wenn mal die LAN Verbindung klemmt oder der Server nicht erreichbar ist, aus welchem Grund auch immer, stört das die Waage überhaupt nicht und die Daten sind auch nicht weg , da ja lokal geschpeichert. Sobald der Server wieder erreichbar ist, werden alle Daten hochgeschaufelt. Noch dazu muss man beachten das man seine Daten in der Cloud komplett aus der eigenen Hand gibt und nicht garantieren kann, das niemand sich diese unter den Nagel reist. Und das Marketinggewäsch von wegen "Ihre Daten sind bei uns absolut sicher!" ist eben nur ein Verschprechen. Wer das glaubt......
-
So. Wie gewünscht.
-
Es kommen folgende Fehlermeldungen tf@red-brick:~$ systemctl status eGTouch.service â— eGTouch.service Loaded: loaded (/etc/init.d/eGTouch.sh; generated; vendor preset: enabled) Active: failed (Result: exit-code) since Mon 2017-12-18 22:37:21 CET; 1min 15 Docs: man:systemd-sysv-generator( Process: 1303 ExecStart=/etc/init.d/eGTouch.sh start (code=exited, status=203/ Dec 18 22:37:21 red-brick systemd[1]: Starting eGTouch.service... Dec 18 22:37:21 red-brick systemd[1303]: eGTouch.service: Failed at step EXEC sp Dec 18 22:37:21 red-brick systemd[1]: eGTouch.service: Control process exited, c Dec 18 22:37:21 red-brick systemd[1]: Failed to start eGTouch.service. Dec 18 22:37:21 red-brick systemd[1]: eGTouch.service: Unit entered failed state Dec 18 22:37:21 red-brick systemd[1]: eGTouch.service: Failed with result 'exit- tf@red-brick:~$ journalctl -xe -- -- The error number returned by this process is 2. Dec 18 22:40:21 red-brick systemd[1]: Starting eGTouch.service... -- Subject: Unit eGTouch.service has begun start-up -- Defined-By: systemd -- Support: https://www.debian.org/support -- -- Unit eGTouch.service has begun starting up. Dec 18 22:40:21 red-brick systemd[1]: eGTouch.service: Control process exited, c Dec 18 22:40:21 red-brick systemd[1]: Failed to start eGTouch.service. -- Subject: Unit eGTouch.service has failed -- Defined-By: systemd -- Support: https://www.debian.org/support -- -- Unit eGTouch.service has failed. -- -- The result is failed. Dec 18 22:40:21 red-brick systemd[1]: eGTouch.service: Unit entered failed state Dec 18 22:40:21 red-brick systemd[1]: eGTouch.service: Failed with result 'exit- Dec 18 22:40:21 red-brick polkitd(authority=local)[308]: Unregistered Authentica Dec 18 22:41:01 red-brick CRON[1662]: pam_unix(cron:session): session opened for Dec 18 22:41:01 red-brick CRON[1666]: (root) CMD (/sbin/fake-hwclock save) Dec 18 22:41:01 red-brick CRON[1662]: pam_unix(cron:session): session closed for
-
So. Geht zwar noch immer nicht, bin aber einen Schritt weiter. Folgendes macht er jetzt. (Nicht daran stören lassen das er meckert,"failed to create symbolic link '/etc/rcS.d/S99eGTouch': File exists" Haber es nur nochmals ausgeführt um den Verlauf hier posten zu können. Der Dienst läuft nicht. Hab es getestet mit Was mache ich noch falsch?
-
Ich verwende das 1.9er Image. Probiert habe ich mit eGTouch_v2.5.5814.L-x und eGTouch_v2.5.5814.L-ma
-
ich versuche gerade den Treiber für folgendes Touchscreen zu installieren. 8" IP65 HB Touch-Monitor. Komme aber im Moment noch nicht sehr weit. Ich habe die Treiber von der Webseite gezogen und auf den RED überspielt. Ich starte wie in der Anleitung beschrieben mit sh die Setup.sh. Das ganze für den ARM. Das Setup läuft auch. Der HMI Touchcontroller wird auch gefunden. Leider bricht das Setup dann ab und sagt das es das uinput module nicht laden kann und bricht mit dem Hinweiß, das ich das Modul neu compilen soll ab. Kann mir jemand helfen? root@red-brick:/home/tf/programs/test/bin# sh setup.sh (*) Driver installer for touch controller (*) Script Version = 1.04.5701 (I) Check user permission: root, you are the supervisor. (I) Platform application binary interface = armv7l Your machine is detected may be as an ARM hard floating platform it is recommended to select [2] ARMhf to install Which platform arch do you use? [1] ARM [2] ARMhf [3] MIPS 2 (W) X server detected. Declaration and Disclaimer The programs, including but not limited to software and/or firmware (hereinafter referred to "Programs" or "PROGRAMS", are owned by eGalax_eMPIA Technology Inc. (hereinafter referred to EETI) and are compiled from EETI Source code. EETI hereby grants to licensee a personal, non-exclusive, non-transferable license to copy, use and create derivative works of Programs for the sole purpose in conjunction with an EETI Product, including but not limited to integrated circuit and/or controller. Any reproduction, copies, modification, translation, compilation, application, or representation of Programs except as specified above is prohibited without the express written permission by EETI. Disclaimer: EETI MAKES NO WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, WITH REGARD TO PROGRAMS, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE. EETI reserves the right to make changes without further notice to the Programs described herein. Licensee agrees that EETI does not assume any liability, damages or costs, including but not limited to attorney fees, arising out from Programs themselves or those arising out from the application or combination Programs into other products or circuit. The use or the inclusion of EETI's Programs implies that the Licensee assumes all risk of such use and in doing so indemnifies EETI against all charges, including but not limited to any claims to infringement of any third party's intellectual property right. Do you agree with above patent declaration? [Y] Yes, I agree. [N] No, I don't agree. y (Q) Which interface controller do you use? (I) [1] RS232 [2] USB [3] PS2 : 2 (I) Please confirm the touch controller is linked with your device. Press [Enter] key to continue.......... (I) /etc/rcS.d path found. ln: failed to create symbolic link ‘/etc/rcS.d/S99eGTouch’: File exists (I) Found a HID compliant touch controller. (I) X.Org X server 1.16.4 (I) X version is 1.7.6 upwards (E) Can't load uinput module. Please rebuild the module before installation.
-
Wie wäre es denn dann mit dem hier? Dann brauchst duauch keinen Master dazu.
-
Willst du also den Dimmerknopf motorisch bewegen oder ihm eine Spannung vorgeben? Kannst du es mal etwas genauer ausdrücken was du mit dem Digitalem Poti meinst?. Oder willst du digitale Impulse an den Dimmer schicken?
-
Was meinst du genau mit "digitalem Poti"? Du willst die also eine Art Dimmer für LED Lampen bauen richtig? Vielleicht das hier? Rotary Encoder Bricklet Um diesen auszuwerten benötist du aber noch einen Master Brick. Du benötigst einen Computer um alles zu steuern. Also entweder einen PC/Laptop oder du nimmst der RED Brick. Dieser ist ein kompletter kleiner Computer. Desweiteren ist die Frage. In welcher Programmiersprache möchtest du schreiben? Du brauchst aber noch weitere Komponenten um die Spannung auszugeben.
-
Hast du die Firmware des Master und des RS232 Bricklet auf dem.aktuellem Stand. Das gab es mal Probleme, die inzwischen gelöst sind. Dabei wurden die Schnittstellenparameter nicht übernommen.
-
% antwortete %s in: Anfängerfragen und FAQBei der Ethernet Extension brauchst du beim RED eigentlich garnix konfigurieren. Einfach im Brick Viewer die Netzwerkeinstellungen konfigurieren, also ob DHCP oder feste IP Adresse, und schon kannst du in deinem Programm ganz einfach über normale Socket Verbindungen mit deiner Steuerung kommunizieren. Welches Protokoll du benutzt ist dir überlassen. Also TCP oder UDP). Das ist ganz normale Netzwerkkommunikation. Die Extension erkennt das Linux im RED als normale Netzwerkkarte. Wie bei jedem anderen PC auch. Wenn du eine Protokollbeschreibung deiner Steuerung hast und weisst welcher Port angesprochen werden muss, ist es "ganz einfach". Kein Hexenwerk.
-
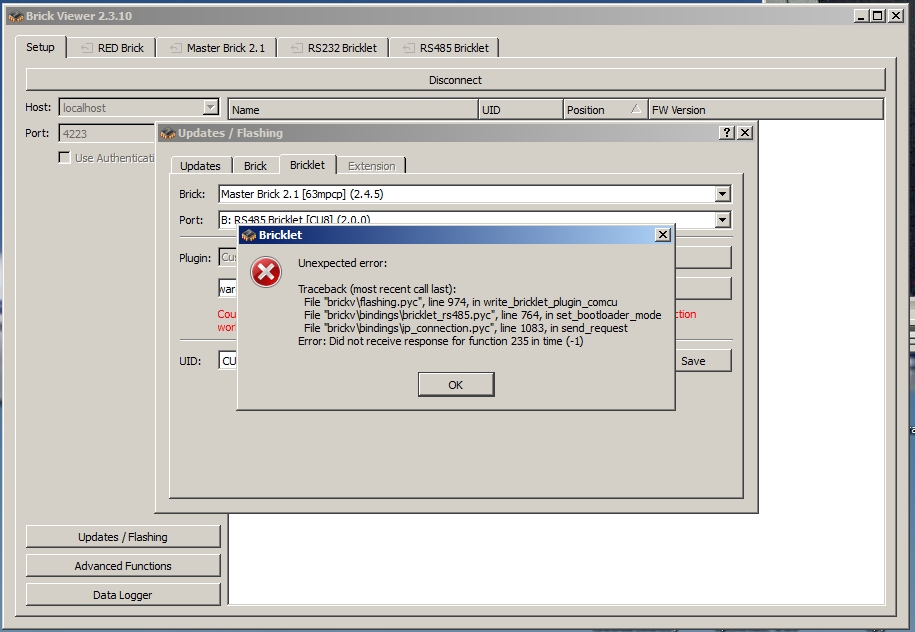
Hallo TF Team. Hab gerade das RS485 Bricklet beim Wickel. Musste leider feststellen das ich das RS485 Briklet nich in der Schnittstellenconfig ändern kann. Ich kann weder die Baudrate noch irgend etwas anderes ändern. (Firmware 2.0.0) Darauf hin wollte ich das Bricklet auf den aktuellen Stand bringen. Geht auch nicht. Es kommt folgender Fehler. Gibt es dafür eine Lösung?
-
% antwortete %s in: Anfängerfragen und FAQDas kommt darauf an welche Sprache du benutzen willst. Der RED ist nix anderes als ein Computer mit Linux als Betriebssystem. Darauf müssen Programme laufen die deine Daten auslesen und auswerten. Das Programm kann dann ganz normal über eine Tcpip (Ethernet) mit einem anderem Programm auf einem anderem Rechner kommunizieren. Beide müssen aber verstehen, wie die Daten geschickt werden. Das nennt sich dann Protokoll.
-
Gugst du Hier .
-
Eventuell ist er im Bootloader Modus. Vielleicht hast du ausversehen den Clear Button betätigt beim Anstecken.
-
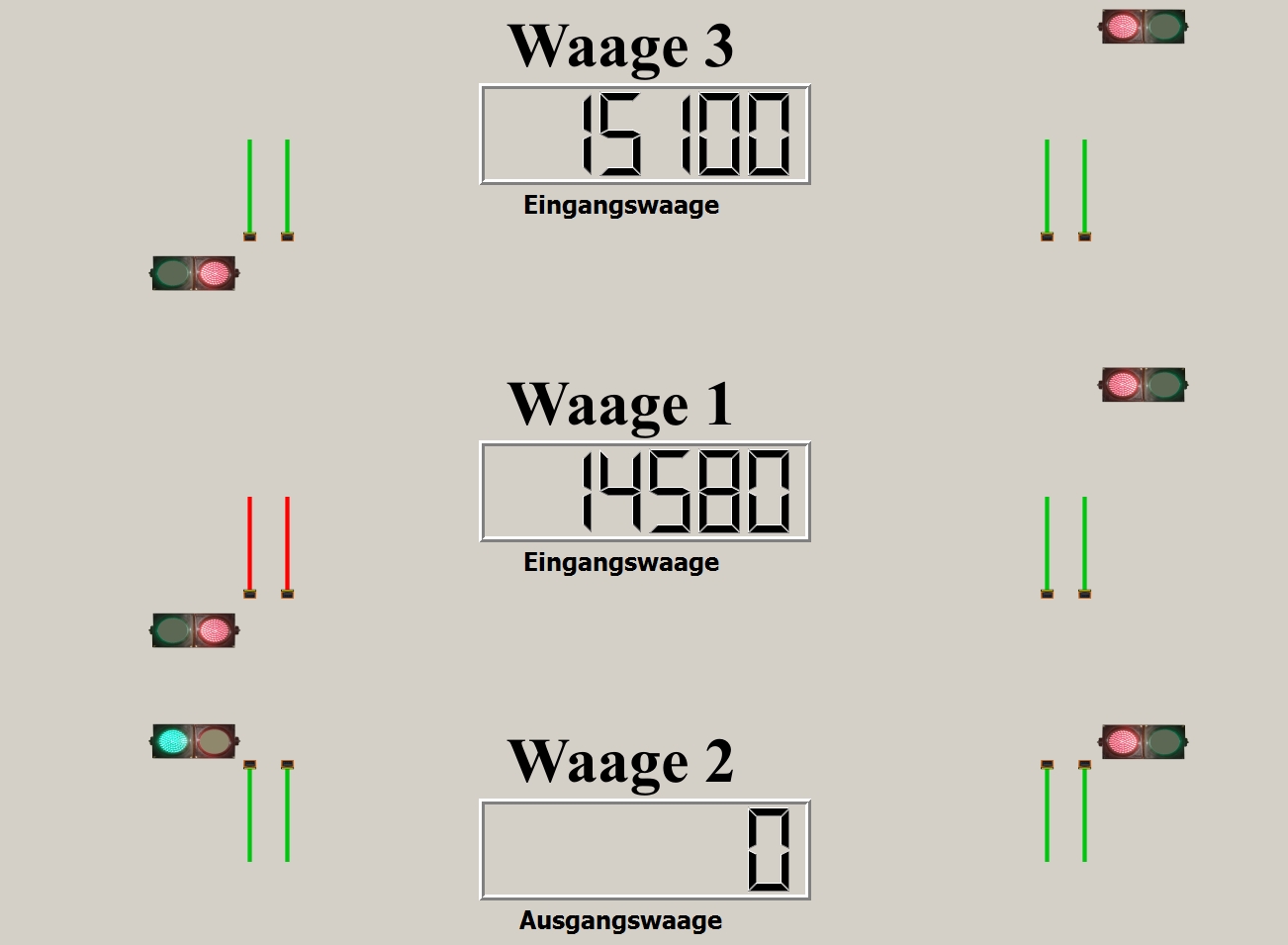
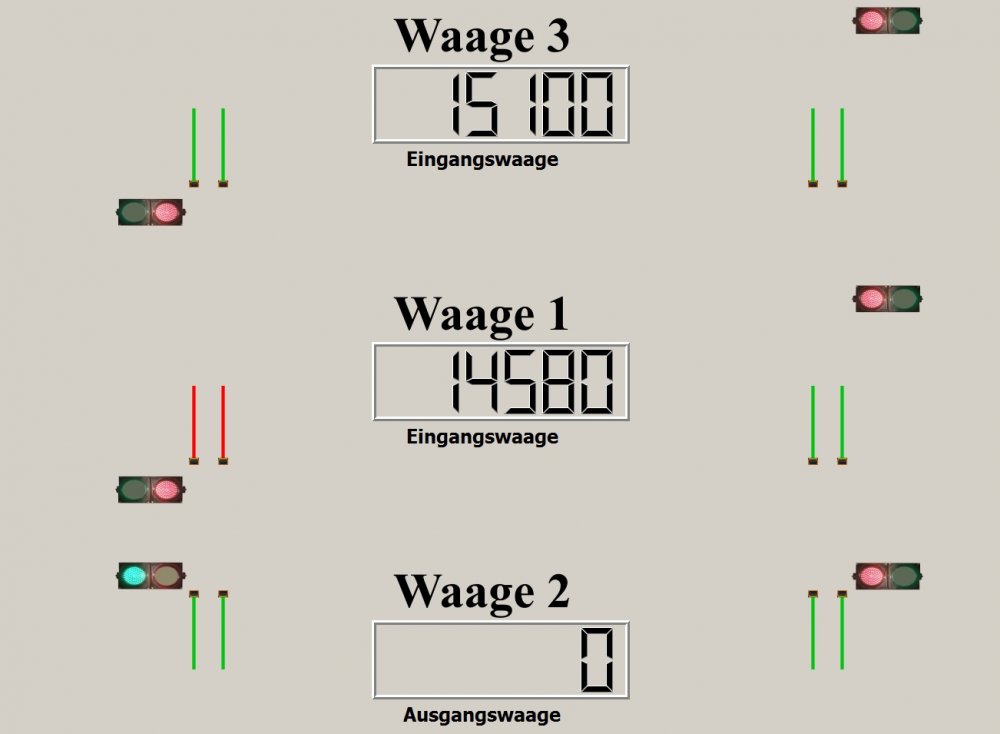
Ich habe einen Vorschlag für die Indutrial Digital Out, Industrial Quad Relay und Dual Relais Bricklet. Könntet ihr da eine Callback Funtion einbauen , wenn ein Ausgang gesetzt wird? Folgender Hintergrund. Ich habe eine Ampelsteuerung gebaut, die über einen Dienst funktioniert. (LKW Waage) Jetzt habe ich mir ein Überwachungsprogramm gebaut, das unabhängig von diesem Dienst die Steuerung überwacht. Im Moment polle ich damit die Relayausgänge, um deren Schaltzustand zu erfahren. Mit einem Callback wäre es aber sauberer und nicht so Trafic belastet. Die Eingänge der Lichtschranken überwache ich per Callback Fuktion. Mit einer Callback Funktion wäre es sauberer zu programmieren diese Ausgänge zu überwachen. So erfährt man ob das andere Programm sauber arbeitet.
-
Es geht devinitiv. Am besten du schreibst das File in deinen Programmordner. Ich erstelle im Programmordner immer einen Unterordner (kann man vom Programmselber anlegenlassen) und schreibe da meine Files hinein. Der RED benutzt die SD Karte als Festplatte , also Laufwerk.
-
Also. Ich habe folgende Stapelkonfiguration. Master 2.1 (FW 2.4.3) -> (Port A) RS232 (FW 2.0.3) Red (FW 2.0.2 Image 1. Step-Down Habe es gerade noch einmal getestet. Es kommt nur Müll an. Es sei denn es geht sofort. Aber es ist nach dem Zufallsprinzip. Die eigentlich gewünschte Konfig ist die mirt dem RS485. Laut deinem Post im englischen Forumsteil wird diese ja mit ttyS0 angesprochen. Geht auch zu öffnen. Und senden kann ich auch. Nur scheint diese nicht der RS485 zu sein. Denn egal ob dieser im Stapel steckt oder nicht, die Liste der COM Schnittstellen sieht immer gleich aus. Ausgelesen im Programm sind es tty0 und ttyS0. In der Commandzeile vom Linux mit ausgelesen kommt folgende Liste! Angezeigt im RED wird er aber schon als Extension. Ausserdem feuert der RS485 sofort Daten raus sobald der RED gestartet ist. Das Programm ist dabei noch nicht gestartet.
-
Eine kurze Frage noch. Ich brauche eine Baudrate von 1200 Baud/8/1/N. Ansprechen tue ich den RS485 über tty0. Funktioniert auch soweit alles. Welche Baudraten kann eure Schnittstelle?
-
Hallo Borg. Ich musste feststellen das das Setzen der Portgeschwindigkeit immer noch verbugt ist. Wenn man die Geschwindigkeit (1200 Baud) einstell, wird diese nicht real übernommen. Angezeigt wird sie zwar, aber an der Gegenstelle kommt diese nicht an. Erst wenn man den Stapel neustartet wird diese Geschwindigkeit gesetzt und die Daten kommen korrekt an der Gegenseite an.
-
Frage. Welche Anschlüsse muss ich bei einer 2-Draht Verdrahtung benutzen? [*]RS485+ & RS485- [*]RS485+ & Gound [*]RS485- & Gound
-
Lass mich mal in meine Glaskugel schauen. Die SD Karte ist von Sandisk? Hab inzwischen schon mehrfach festgestellt das diese sehr schnell fehlerhafte Zellen haben. Image von der Karte gezogen. Später wieder aufspielen wollen. Sagt das Programm, das die Karte nicht groß genug ist. Die Qualität bei Sandiskt scheint mächtig nachgelassen zu haben.
-
Auf eine feste Ebene stellen, so das die Kabelseite nach oben zeigt. Dann vorsichtig die zum Kabel gehörenden orangenen Plastiknase mir einem schmalem flachen Schraubendreher (z.B. Phasenprüfer) nach unten , also in den Stecker hinendrücken und halten. Dann kann man das Kabel herausziehen oder hineinstecken. Aber Vorsicht das du den Stecker dabei nicht wegknickst. Vielleicht in einen kleinen Schraubstock einspannen wenn möglich.
-
Richtig erkannt Borg. Das ist ein sogenannter Initiator. So sagen wir zumindestens in der Elektronikinstandhaltung dazu. Wenn du mit einem Metallteil näher kommst schaltet der Ausgang. Wird viel als Endschalter oder als Positionsmelder für bewegliche Anlagenteile benutzt.