

raphael_vogel
-
Gesamte Inhalte
328 -
Benutzer seit
-
Letzter Besuch
Posts erstellt von raphael_vogel
-
-
Achso wenn wir schonmal dabei sind:
Auf der ServoBrick Seite (http://www.tinkerforge.com/en/doc/Hardware/Bricks/Servo_Brick.html) zeigt der Link zu TurboPWM nicht den richtigen Inhalt an denke ich....
-
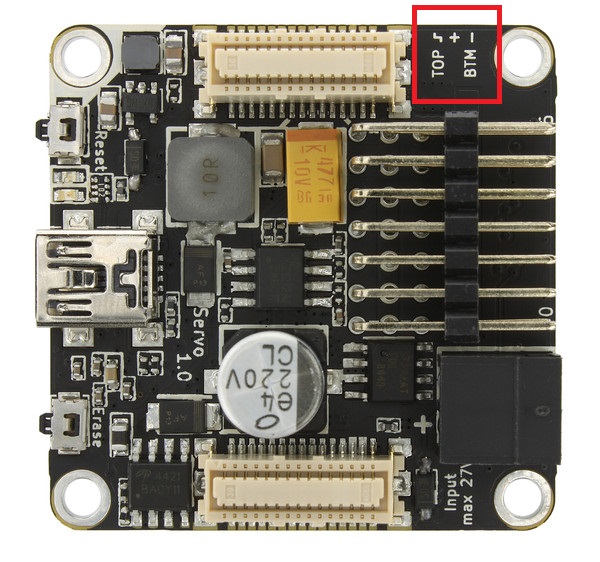
Ah ok hab's jetzt auch gesehen denke ich. Der oberste Pin ist also das PWM Signal. Ich denke wenn's auf der Platine ist reicht das.....

-
Hi
Beim Servo Brick wäre es hilfreich, wenn man wüßte wie die Belegung der 3 vertikal angeordneten Stifte aussieht. Gerade wenn man einen ESC anschließen will, dann muss man wissen, welcher Pin (oben, mitte oder unten) beim Servo Brick das PWM Signal ausgibt und welcher Masse ist.
-
Hmmm... die Fragen sind nicht leicht zu beantworten, da sie sehr generell sind.
Ich versuchs mal in aller Kürze:
* Installiere auf dem PC den Brick Daemon (brickd, siehe Tinkerforge Dokumentation)
* Verbinde deinen Master Brick über USB mit einem Rechner (PC, Raspi...)
* Entscheide dich für ein Binding (Programmiersprache). Installiere z.B. Python auf deinem Rechner und installiere die Tinkerforge Bindings.
* Schau in die Tinkerforge (TF) API der Programmiersprache. Als Anfänger würde ich Python benutzen, alles andere geht aber natürlich auch.
* Schau dir die einfache Beispiele an: http://www.tinkerforge.com/en/doc/Software/Bricklets/IO16_Bricklet_Python.html#io16-bricklet-python-examples .
* Beim UI musst du dich entscheiden ob du ein Web UI oder ein natives UI willst. Beim WEB UI musst du einen WebServer installieren und dann mit HTML/JavaScript/ und der Programmiersprache eine Oberfläche bauen. Bei nativen UIs hängt es oft von der Sprache an sich ab, wie du ein UI baust.
Empfehlung:
Wenn du noch keinerlei programmier Erfahrung hast wird es schwierig. Dann kauf dir erst mal ein Buch und fang mit den Basics an.
Hoffe das hilft etwas ;-)
-
-
Wenn es nur um an/aus geht kannst du auch einen Master Brick mit Dual Relais Bricklet oder Industrial Quad Relais Bricklet verwenden.
http://www.tinkerforge.com/de/doc/Hardware/Bricklets/Dual_Relay.html
http://www.tinkerforge.com/de/doc/Hardware/Bricklets/Industrial_Quad_Relay.html
Das Quad Relais ist allerdings auf 1,2 A beschränkt.
-
Für den RED ist es schwierig.
Ich denke mit "massenhaft" meinte derAngler vielleicht in Verbindung mit Raspi.
Für den Raspi kommt ja in Kürze ein von der RPi Foundation entwickeltes Touch Dissplay.... Mal schauen....
-
Also nochwas...
Welche Maximal Drehzahl kann der Motor nach dem Getriebe erreichen? (U/min)
-
Hab etwas zu Schrittmotoren allgemein gelesen, hab aber noch folgende Fragen zum Schrittmotor mit Getriebe:
1) 12V pro Phase, heisst das dass man 24V Betriebsspannung braucht?
2) 0,4 A pro Phase, heisst das dass der Motor dann insgesammt 0,8 A zieht?
3) Drehmoment von 5,94, ich nehme an dass das nach dem Getriebe ist ?
4) In der Doku zum Stepper steht, dass man den Decay Modus richtig einstellen muss. Was muss man hier für die Motoren einstellen, die es im Shop gibt? Sollte man vielleicht auch in die Doku mit aufnehmen.
5) Wenn ich noch ein Step Down Brick verwende kann das ja die Durchleitung für Motortreiber Bricks bis zu 5A. Also sollte das für den Getriebe Stepper reichen und man kann den Motor mit dem Stapel versorgen ?
-
Hi
Wie schon in der Doku beschrieben ist das stark von der Versorgungsspannung abhängig, sowie generell bei US Sensoren von weiteren vielen Faktoren (Hindernisse, schräge Messflächen, Temperatur, Luftdruck, Umgebung, schallschluckende Oberflächen.....).
http://www.tinkerforge.com/de/doc/Hardware/Bricklets/Distance_US.html#beschreibung
In einem konkreten Setup bei dem immer gegen die gleiche Oberfläche gemessen wird und auch eine stabile Versogungsspannung da ist, solltest du einfach durch Vergleichsmessungen ein Umrechnungsfakor ermitteln können (der dann einigermaßen stabil bleibt).
Erwarte von diesem Sensor keine Genauigkeiten im mm Bereich
-
Hi Borg
Ich will feststellen können, ob der Laserstahl nur durch einen Regentropfen (kurze Unterbrechung) oder durch eine Person (lange Unterbrechung) unterbrochen wurde.Wird sowas möglich sein mit der API? Also eine Kombination von callback und Zähler wie oft der callback gerufen wurde und das auf dem Bricklet selbst um die Performance zu bekommen?
-
Kommt bald zusammen mit anderen Bricklets.
Lies das mal genau durch, dann weißt du was kommt:
http://www.tinkerunity.org/forum/index.php/topic,673.msg19249.html#msg19249
Das heisst dann Laser Range Finder Bricklet
-
Hi Borg
Was ich vorhabe:
Mit dem Laser Bricklet würde ich gerne ermitteln, wie lange der Laserstrahl unterbrochen wurde (Outdoor Security Anwendung). Ich will feststellen können, ob der Laserstahl nur durch einen Regentropfen (kurze Unterbrechung) oder durch eine Person (lange Unterbrechung) unterbrochen wurde.
Wenn ich nun über einen Threshold Callback (z.B. Distanz kleiner als 20m) mit debounce period von 1ms die Anzahl der Aufrufe meiner Callback Methode zählen würde und die Callback Methode wirklich jede ms aufgerufen würde, hätte ich einen exakten Wert wie lange der Laser unterbrochen wurde.
Was mir noch einfällt: Vielleicht sollte es auch mit einem Zähler im Bricklet selbst funktionieren, den ich dann per API auslesen könnte, analog zum getEdgeCount() bei den IO Briclets?
Denn so wie ich das verstanden habe wird so ein Counter im Bricklet selbst hochgezählt und ist daher genauer ?
-
Hi TF Team
Ich hätte einige Anwendungsszenarien in denen zuverlässig Zeiten gemessen werden müssten (1ms Genauigkeit).
Ich fände es einen echten Mehrwert (im Vergleich zum RPi), wenn der RED auf einem RealTime Linux Kernel laufen würde. Dann würde ich sogar meine RPi's gegen den RED austauschen.
Was spricht dagegen, und würde man damit dann zuverlässige Messungen im 1ms Bereich bekommen?
-
Schau mal hier.
http://www.tinkerforge.com/de/blog/2012/5/25/chibi-oder-kein-chibi-das-ist-hier-die-frage
Eventuell wird TF da eine neue Funklösung rausbringen, aber ich denke nicht in den nächsten 5 Monaten
-
Ich würde noch einige Wochen warten, da TF gerade neue Analog In Bricklets produziert.
Es wird vermutlich 2 neue Analog In Bricklets geben mit denen du Spannung messen kannst. Ein hochauflösendes Industrial Analog In (https://github.com/Tinkerforge/industrial-dual-analog-in-bricklet) und ein standard Ananlog In Bricklet (https://github.com/Tinkerforge/analog-in-v2-bricklet).
-
und alle Links zu den Master Extensions funktionieren nicht.
http://www.tinkerforge.com/de/doc/Hardware/Master_Extensions/Chibi.html
http://www.tinkerforge.com/de/doc/Hardware/Master_Extensions/Ethernet.html
http://www.tinkerforge.com/de/doc/Hardware/Master_Extensions/RS485.html
http://www.tinkerforge.com/de/doc/Hardware/Master_Extensions/WIFI.html
-
Hi Sven
Sieht sehr gut aus. Kannst du etwas mehr zum Mobilfunk basierendem FPV sagen? Wie hast du das gemacht?
-
Das ist mit dem aktuellen Dollarkurs nicht möglich, du darfst auch nicht vergessen das die Preise in den USA keine MwSt haben.
Der Sensor selbst kostet bei aktuellem Kurs schon 97,93€: http://www.wolframalpha.com/input/?i=89*1.19%24+in+%E2%82%AC
Ja klar. Hatte ich nicht beachtet. Werd mir das Bricklet trotzdem holen
-
Hi Nic
Gibt es sowas auch um es auf eine Motorwelle zu stecken oder gar hohl ?Nein hab ich noch nicht gesehen. Aber in dem Video
ist eine Lösung mit Schrittmotor zu sehen, der auch so einen Slip Ring benutzt. Es sollte nicht allzu schwer sein das nachzubauen. (Wäre auch ein Grund für mich mir endlich einen 3D Drucker zu kaufen :-)Bei so einem Slip Ring müsste man halt das Bricklet Kabel auftrennen um es mit dem Slip Ring zu verbinden. Sollte aber keine Probleme bereiten denke ich.
Ist der Preis für das Bricklet schon bekannt ?Bei denen im Store kostet das Lidar ja 89 Dollar. Das Ding spricht I2C oder PWM also sollte das kein großes Problem für TF sein daraus ein Bricklet zu machen. Ich denke damit sollte es noch unter 100€ liegen?
-
Was möchtest du denn wissen? Es ist mein neues Lieblingsbricklet. Wir konnten in Tests eine Entfernung von 35m mit einer Genauigkeit von 1cm messen. Macht echt Spass damit rumzuspielen
Ich habe 2014 schon das LIDAR Projekt auf der Crowdfunding Seite verfolg. Super dass ihr daran jetzt arbeitet.
Kann man damit neben der genauen Entfernungsmessung auch die Reflexsivität der Oberfläche bestimmen (Intensität mit der der Laser reflektiert wird?)
Für einen mobilen Roboter is das LIDAR ja sehr spannend. Mit so einem "Slip Ring" kann man das LIDAR dann noch kontinuierlich 360 Grad drehen ohne dass sich die Kabel verwickeln! http://www.adafruit.com/products/736
Vielleicht könnt ihr das ja auch im Shop noch anbieten.
Damit kann der Roboter dynamisch eine Karte seiner Umgebung anlegen.
Freu mich schon drauf damit zu experimentieren, und 1-2cm Genauigkeit für den Preis is unschlagbar! Sick LIDAR's kosten ein vielfaches.
-
Vielleicht ist das auch nicht eure Intuition, aber vielleicht koennt ihr ja ein wenig ueber das Bricklet verraten.
Wenn wir schon dabei sind...
;DIch würde auch gerne etwas über das LIDAR Bricklet erfahren, wenn's denn kommt...
-
Hmm...
das solltest du mit Software Logik lösen können denke ich.
Du kannst ja damit anfangen das Relais alle 10 Sekunden für 10 Sekunden einschalten und dann 10 Sekunden ausschalten.
Wenn du nah an der Zieltemperatur bist, dann machst du das Relais nur noch 5 Sekunden an und 15 Sekunden aus. Entfernst du dich von der Zieltemperatur wieder dann erhöhst du die Einschaltdauer wieder usw....
Damit näherst du dich sehr langsam der Zieltemperatur und das 15-20 Minuten "Nachglühen" der Heizmatte fällt weg.
Sonst fällt mir noch PWM ein, dort kannst du über die Pulsweite das auch regeln.
-
Danke.
Ich hab nun auch 2 IR-Köpfe bestellt, und werde das ganze erstmal mit dem Raspi machen.
Mein Stromzähler sendet angeblich die Daten im SML Format (http://de.wikipedia.org/wiki/Smart_Message_Language)
Muss mal schauen wie ich die dann parse......


 ;D
;D
RS232 Bricklet
in Hardware
Geschrieben
Hi TF
Wird das RS232 Bricklet eigentlich auch UART-TTL unterstützen? Wenn ja mit welcher Spannung? 5 oder 3,3 Volt? Wird das konfigurierbar sein ähnlich wie beim IO-16 Bricklet?