

Nic
-
Gesamte Inhalte
1.425 -
Benutzer seit
-
Letzter Besuch
Posts erstellt von Nic
-
-
Möglich dass ich in der Schema Zeichung http://download.tinkerforge.com/_stuff/datasheet/btb_top_935.pdf
oder Doku http://www.tinkerforge.com/doc/Technical_Data.html etwas übersehen habe, aber wo ist z.B. Pin 1 ?
-
Die Probleme hatte ich am Anfang auch, einmal war die Isolierung noch nicht genug abgetrennt und andereseits ist z.B. die Verlötung der Adern kontraproduktiv, da der Querschnitt u.U. zu dick wird, ansonsten mit ein bisschen Kraft die Kabel reindrücken. Wenn es sich zu oft löst, ist das ein Hinweis das der Querschnitt des Kabel einfach zu dick ist.
Bei einem Brick habe ich an der Platinenunterseite nochmals Buchsen zum Verschrauben der Kabel angelötet, da mir die mitgelieferten Stecker einfach zu weit vom Platinenrand rausragen, die angelöteten Buchsen lassen sich aufgrund der fetten Lötstellen nicht ohne weiteres lösen.
-
Hast Du mal im bin oder target folder nachgeschaut, also dort wo das Compilat entsteht, ob die DLL auch dort verfügbar ist ?
-
Um für einen Funk-Slave-Stack mobil genug zu sein, würde ein neues Power-Supply Modul mit eingebautem Akku sehr praktisch sein.
Habe mal einige Notstrom-Batterie/Akku-Packs wie es zahlreich für Handies gibt angeschaut und meist ist/sind dort 1 oder meherere 3,7 Volt LiPo-Akkus verbaut, die vom Formfaktor recht gut auf eine Brick-Platine passen könnten.
Über einen USB-Anschluss könnte der Akku aufgeladen werden.
-
Ich gehe mal davon aus, man braucht immer noch einen 2.PC mit Win, Linux oder MacOS als Host für den Daemon-Dienst !? Oder gibt es Pläne diesen auch auf Android zu portieren ?
-
Hi ArcaneDraconum,
Fragen zum QT Designer bitte an die Admins vom Forum oder jemanden anderes, der sich mit dem Tool auskennt.
Allerdings scheint der QT Designer zum Erzeugen von Applicationen nicht nur auf Windows geeignet zu sein. Das ist natürlich ein Vorteil gegenüber VisualStudio.
Nachteil der Cross-Kompatibilität gibt es aber, wenn man auf propieritäre Schnittstellen in Windows angewiesen ist, um spezielle Hardware (ich meine nicht Tinkerforge) anzusteuern.
Richtig spannend wird aber in Zukunft auch die Progr. für Windows 8, da muss dann unterscheiden zw. x32/x64 und ARM CPU
 D.h. Compilate für die Intel-Architektur laufen NICHT unter einem Tablet-PC mit ARM-Architektur.
D.h. Compilate für die Intel-Architektur laufen NICHT unter einem Tablet-PC mit ARM-Architektur. -
@Mclollig
Zu jedem Projekt/Solution kann man eine sogen. Reference hinzufügen. Damit lassen sich DLLs etc. einbinden. Hast Du die Tinkerforge-DLL so hinzugefügt ?
-
http://qt.nokia.com/images/products/qt-designer-screenshot-mac/view
Also auf den ersten Blick ist die IDE von QT Designer recht ähnlich zu VisualStudio, soviel weniger oder mehr Button sind da auch nicht zu sehen.
Aber eig. ist das reine Geschmacksache welche Entw.umgeb. man auch nimmt, einfach einige ausprobieren und dann das nehmen was gefällt.
-
In VisualStudio sind keine 250, vielleicht eher 53 Buttons ...
Aber man muss auch nicht alles in dieser Umgebung kennen, um mal schnell einen Prototypen mit GUI zur Steuerung der Hausautomation zu entwerfen.
Andererseits sind kleine Consolen-Anw. zum Testen einer Funktion oder eines einzelnen Bricks wie in der Tinkerforge-Doku gewiss auch im Texteditor schnell geschrieben.
Wie schnell und komfortabel könnte ein Hobby-Progr. den eine Phyton-Applikationen mit ansprechendem GUI entw. ?
-
http://openbook.galileocomputing.de/einstieg_vb_2010/
http://openbook.galileocomputing.de/visual_csharp_2010/
Und nochmals: bringt man beruflichen Hintergrund mit und hat z.B. als Anwendungsentw. bereits Erfahrungen über Software-Entw. allgemeiner Natur gewonnen, so kann er/sie als Anfänger, zum Erlernen einer neuen Sprachen/Technologie, nicht gleichzusetzen sein, wie der Threadbeginner. Wenn ich das richtig verstehe, möchte er das nur so als Hobby nebenbei, dann sind OpenSource-Produkte/Sprachen zu ambitioniert.
-
Das ist mit VisualStudio ist so nicht richtig:
Es gibt abgespeckte sogen. Express Versionen, die jeweils nur eine Sprache, also C# oder VisualBasic unterstützen. Zur Abwechslung gibt es das von M$ umsonst !
http://www.chip.de/downloads/Visual-Basic-2010-Express_24082907.html
http://www.chip.de/downloads/Visual-C-2010-Express_24082800.html
Bei solchen Themen wird immer zu leichtfertig solche OpenSource-Frameworks oder Sprachen wie Java, Phyton etc. empfohlen, die für den Laien einfach nichts Produktives darstellen. Die passenden Editoren und Distributionen sind noch weit davon entfernt als Einstieg in die Hobby-Programmierung.
-
Zur Stepper-API Erweiterung fällt mir ev. noch eine Ergänzung ein, eines sogen. Homeruns:
Durch setPosition wird ein Lauf von z.B. 12000 Schritte ausgelöst.
Ist dieser durch Meldung im Callback am Ende soll der Motor automatisch zum Ursprung zurückgedreht werden.
Olaf,
wenn Du die Semantik von PositionReached verändern solltest, ergänze dann diesen durch einen weiteren Parameter, der uns hilft zu unterscheiden, ob das Event aufgrund von Stop oder durch das komplette Abfahren der SetPostions auftritt.
-
Habe gerade das hier aufgegabelt,
http://www.elektor.de/elektronik-news/funk-fernbedienung-mit-touchscreen.2135976.lynkx
ev. lässt sich das als Bricklet oder Brick integrieren. Erwähnt wird ZigBee...
Eine kleine Fernsteuerung wäre ev. auch für die Hausautomation hilfreich.
-
Wenn Windows als Betriebssystem zulässig wäre, empfehle ich VisualStudio. Damit könnte man zur Not auch in Basic progr. wenn es mit dem früheren Basic nicht soviel zu tun hat.
Habe vorher in Delphi progr. und fühle mich bei VisualStudio von M$ trotzdem ganz gut aufgehoben.
Wenn Du Wert legst auf eine übersichtliche Benutzeroberfläche (GUI) würde ich von Java, Phyton etc. abraten die Editoren sind m.E. nichts für Laien.
Alternativ könntest Du eine Konsolen-Anwendung, die die minimale Hardware-Steuerung der Bricks übernimmt in jeder Sprache schreiben, und dann diese Consolen-Anwendung die als Server bzw. Host via TCPIP oder in Windows per Messaging ansprechen und das GUI z.B. in Delphi erstellen.
Für Laien sehe ich den unterschiedlichen Syntax oder die Eigenarten der Sprache an sich nicht als ein Problem, sondern eher die verfügbaren Entwicklungsprogramme oder Editoren, die das Program. eig. erleichtern sollen.
-
Ungern, da Windows kein Echtzeitsystem ist, bevorzuge ich die dezentrale Timer-Steuerung im Stepper-Brick eher als das Risiko, dass der Timer-Thread in meinem Programm wenn auch nur geringfügig durch Windowsinterne Prozesse beeinflusst wird. Das ganze soll später auf einem Nettop flüssig und zuverlässig laufen. Selbst das Intervallprogramm wird durch die Kamera selbst, also auch dezentral vom Rechner, gesteuert.
-
Hallo Olaf,
nein im Gegeteil, je feiner die Schrittteilung desto ruhiger. Ich verwende ein mehrstufiges Planetengetriebe mit 25:1 Untersetzung und einem 0,9°-Schrittmotor, schon bei Halbschritt ist die Bewegung sehr ruhig. Im Zeitraffer bei 30f/s würde man Unregelmässigkeiten oder gar Aussetzer sofort bemerken. Leider sind die Schwenks auch bei 1/8 zu schnell.
Nachträglich ein anderes Planetengetriebe ist nicht mehr so einfach möglich. Oder alternativ ein 0,45° Stepper ist zu teuer.
-
Für meine Getriebe-Motor-Komb. ist der minimale Schrittimpuls von 1 Step/sec (bei 1/8 Stepmode) immer noch zu schnell (Kamerafahrt bei Zeitraffer). Wäre es möglich die Firmware des Steppers so zu erweitern, dass ein sogen. Untersetzungsfaktor (int) die Schrittfolge zeitl. noch weiter dehnt ? Z.B. der Dehnungsfaktor von 2 würde 1 Step/2sec bedeuten ?
-
So bin jetzt erst zum Testen gekommen, neueste FW:
Master hängt am PC. Slave mit IMU an einen mobilen Akku von Energizer mit USB-Output und das klappt prima. Sehe ohne Einschränkungen die IMU-Daten im Viewer. Super Arbeit !
Sowas klappt aber nur wenn ich zuerst den Slave an den USB-Output verbinde und erst DANACH den Master mit dem PC verbinde, sehe ich 2 Master und das IMU-Brick.
Hängt der Master aber schon am PC und aktiviere ich erst dann den Slave, gibt es nur den Master im Viewer zu sehen.
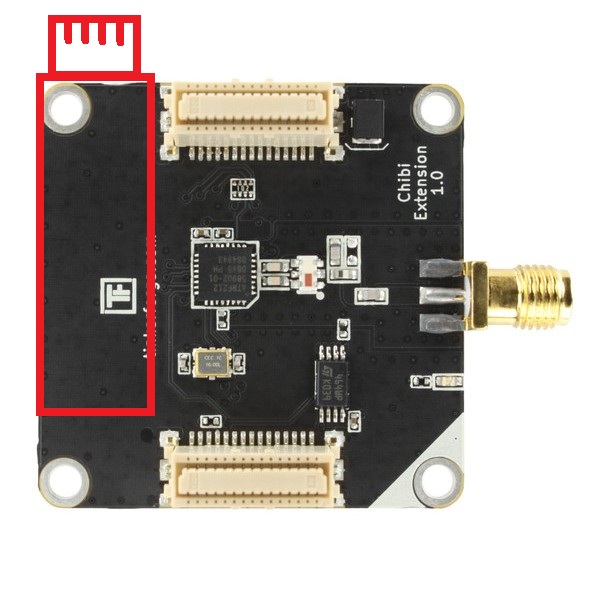
Auf dem Chibi gibt es ein wenig Platz ev. für einen USB-Typ A Stecker. Siehe Screenshot.
Ist dieser Bereich kritisch ? Veränderungen natürlich nur auf eigene Gefahr
-
Angenommen mein Nachbar besorgt sich auch einen Master/Chibi und stellt zufällig die gleichen Settings bzgl. Frequenz, Kanal und Master-Slave ein, ohne das ich davon weiß ? Könnte ich seinen Stack im Viewer auch sehen bzw. gibt es da Konflikte ? Gibt es hier Möglichkeiten die Funknetze abzusichern ?
-
Die "zeitnahen" Daten wie z.B. CurrentVoltage oder remaining steps wie habt ihr das im Viewer gelöst ? Über einen Timer ?
-
Verstehe, aber an diesem autarken Master-Chibi hängt nur ein Analog-Out mit 0V.
Da müsste eine USB-5V Quelle reichen.
-
Als externe USB-Stromversorgung für den Master-Chibi darf es ev. auch mal 4,8 bzw. 6 statt 5V sein ? Des Formfaktors wg. würde ich gerne 4 Micro-AAA Akkus/Batterien direkt anschließen.
-
Registry in Windows, das reicht und ist für mich ok. Danke.
-
Wo findet man die Version der installierten BrickD-Service und BrickViewer ?
 D.h. Compilate für die Intel-Architektur laufen NICHT unter einem Tablet-PC mit ARM-Architektur.
D.h. Compilate für die Intel-Architektur laufen NICHT unter einem Tablet-PC mit ARM-Architektur.

Pin Nummerierung auf Board-to-Board Connector (Top-Side)
in Allgemeine Diskussionen
Geschrieben
Danke Bastian,
kein Problem. Die Posts im Forum helfen erstmal.
Was meinst Du mit Kicad Design Files Das hier http://download.tinkerforge.com/_stuff/datasheet/btb_top_935.pdf ?
Das hier http://download.tinkerforge.com/_stuff/datasheet/btb_top_935.pdf ?
Dort ist ein Circuit No 1. eingetragen, das meint dann Pin 1 !? Ich frag lieber mal nach bevor meine Bricks einen Schaden bekommen Den USB-Port zu umgehen, möchte ich 5V dem Stack zuführen, das könnte ich z.B. über Pin 22 (5V) und 21 (GND) ?
Den USB-Port zu umgehen, möchte ich 5V dem Stack zuführen, das könnte ich z.B. über Pin 22 (5V) und 21 (GND) ?
Hmmh, wie ist der Connector von den Pins dann eig. durchnummeriert clockwise oder ccw ?