
borg
-
Gesamte Inhalte
3.633 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
63
Posts erstellt von borg
-
-
die neue die [...] hat neben dem 6-27V Eingang auch noch einen 5V Ausgang (exakt für Sachen wie das Beagle Board oder das Raspberry Pi).
Macht es dabei eigentlich Probleme, dass die Bricks und der PC gleichzeitig Strom bekommen. Ich nehme mal an, dass die Bricks deutlich schneller hochgefahren als der PC, und somit nicht wissen ob sie an einem PC hängen oder nicht?
Gute Frage, da hab ich noch nicht drüber nachgedacht. Man kann natürlich wenn das Linux Board hochgefahren ist beim Master einmal auf Reset drücken, dann läufts.
Rein softwaretechnisch ist es aber denke ich auch möglich den Bricks USB-Hotplug beizubringen (d.h. ein Brick wechselt vom Slave in den Master Modus wenn es an ist und man USB dransteckt). Das wirft dann natürlich Fragen auf: Was ist mit einem Brick das im Slave Modus in einem Stack ist der über USB angeschlossen ist? Wenn ich da USB dran anschließe, was soll dann passieren?
-
@gunter das Encoder Bricklet steht in der TODO Liste nach OS X Support und RS485 Extension
@redieck: Wir verkaufen im Moment noch alte Step-Down Powersupplies aber die neue die gerade in Produktion ist hat neben dem 6-27V Eingang auch noch einen 5V Ausgang (exakt für Sachen wie das Beagle Board oder das Raspberry Pi).
-
Du kannst den Master Stack nach neuen Chibi Teilnehmern suchen lassen indem du auf den Reset Knopf drückst.
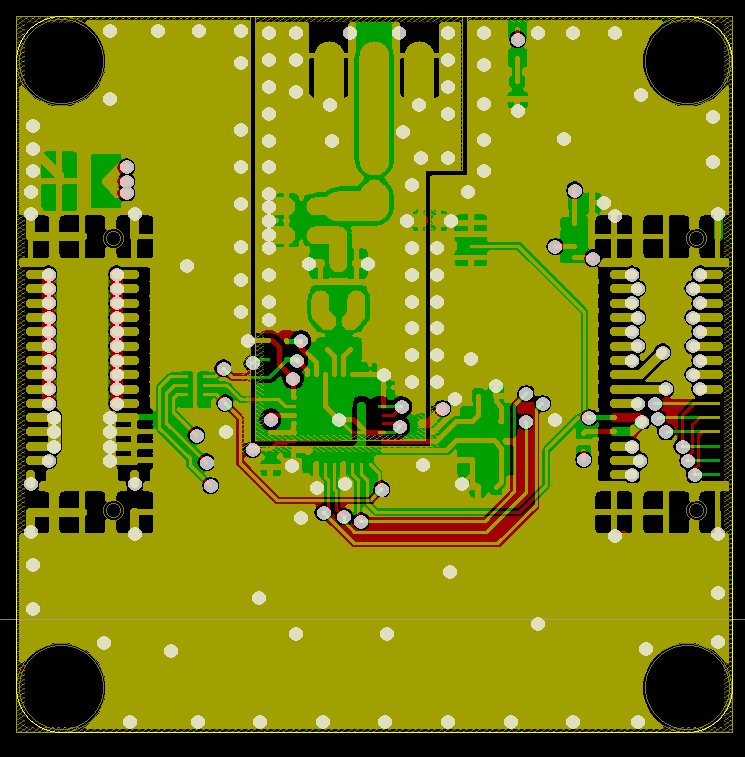
Bzgl des Platzes am unteren Rand der Chibi Extension: Sieht für mich so aus als würde da keine Leiterbahn durchgehen, hab mal das Layout mit allen relevanten Lagen angehängt.

-
Hehe, innerhalb deutschlands kann ich mir gut vorstellen auf dauer auch einen Paketdienstleister zu benutzen. Bisher hatten wir einfach nicht die Zeit da mit einem zu verhandeln. Ich könnte mir aber gut vorstellen das wir uns da drum kümmern wenn jetzt die ganzen Vorbestellungen raus sind.
Ins Ausland sind die Einschreiben für uns allerdings wirklich super. Wir haben den Vorteil das unsere Produkte klein und leicht sind, d.h. wir können sie als Maxibrief (unter 500g) ins Ausland schicken für schlappe 3,45€ (7€ für 500-1000g) dazu kommen dann jeweils noch 2,05€ für das Einschreiben. Dafür wird aber z.B. eine Sendung nach Australien in unter 5 Tagen verschickt!
Zum vergleich: Ein DHL Paket nach Australien kostet 42€ und dauert 11 Tage!
Was ein Express DHL Paket nach Australien kostet will ich hier gar nicht sagen, das würde mir eh keiner glauben: http://bit.ly/wHvVco
.Edit: Ganz Allgemein verschicken wir natürlich als Einschreiben damit wir einen Nachweis darüber haben das wir es abgegeben haben und auch einen Nachweis bekommen wenn es angenommen wurde. Versichert sind Einschreiben auch bis zu einem bestimmten Betrag.
-
Das kann ich leider nicht erklären.
Ich frage batti morgen früh ob er was dazu schreiben kann, er ist der Elektrotechniker von uns beiden. Da aber die eigentliche Bricklet Spannung (gemessen zwischen + und -) nicht einbricht gehe ich davon aus das es was mit den Interna von dem IO Expander zu tun hat.
-
Wait, what? That works?
I was "hoping" that the Master doesn't show up in the Brick Viewer anymore in that case (this would mean that the Chibi Extension must be defect)
This is the most confusing thing ever. Well if everything works this way i suppose it is OK.
-
Ich befürchte das bedeutet, dass der IO Expander deine Reed Relais nicht Schalten kann (Aufgrund zu hoher Peak Ströme oder zu hoher Induktivität oder so, man weiß es nicht).
Wenn wir das nächste mal etwas bei Reichelt bestellen bestelle ich mal so ein kleines Reed Relais mit, wir können dann mal genauer nachmessen woran es liegt.
D.h. wenn du mit der IO16 Relais schalten willst muss da wohl ein Transistor oder MOSFET o.ä. her: http://www.mikrocontroller.net/articles/Relais_mit_Logik_ansteuern
-
Mit deinem Nachbarn kannst du dich absprechen wer welche Kanälfe, Frequenzen und IDs verwenden darf. Gegen einen "Angriff" auf dein Chibi Netz gibt es allerdings keine Sicherheiten! Daten werden nicht verschlüsselt übertragen o.ä.
-
I see. One thing i didn't ask yet: Do you have antennas connected to the Chibi Extensions?
And if you can test one more thing:
If you change the master and slave Chibi Extensions (i.e. you configure the current slave as master and the other way around) does that change something?
Edit:
I just reread the thread, what i noticed now: When you say: "another to a dc brick for power" you mean Step-Down Powersupply, right? The DC Brick is a Brick that controls DC Motors, that can't power a stack.
And if you use the Step-Down Powersupply, what do you use for power input?
-
Überall wo es Callbacks gibt nehmen wir die natürlich, ansonsten Timer, ja.
-
Hab doch noch ein Relais gefunden das klein genug ist um es mit der IO16 zu schalten (http://pewa.panasonic.com/assets/pcsd/catalog/js-m-catalog.pdf):
Ich messe im geschalteten Zustand (A7=low):
30mA last
4,68V zwischen + und -
3,88V zwischen + und A7
Ich messe im nicht geschalteten Zustand (A7=high):
4,76V zwischen + und -
0V zwischen + und A7
Das ist ziemlich genau was ich erwartet hab, die Spannung vom Bricklet selbst bricht nicht ein, an dem belasteten Pin allerdings schon.
Kannst du das so bestätigen bei dir?
Ich kriege es bei mir allerdings nicht hin irgendwas zum abstürzen zu bringen damit. Ein unterschied ist, dass dein Relais ein Reed Relais ist und meins nicht, ich weiß nicht ob da nicht vielleicht die Peak Ströme höher sind.
-
Interesting that there even is a signal strength when you don't see the other master. The signal strength is only measured if packages are received.
I am still a bit confused, you wrote before:
I set one chibi as master and the other as slave exactly as you've shown in your guide. I can confirm that each chibi is set right as if I plug each master into my main pc the chibi settings details show as I've configured them (and as you've provided in your example).
What did you mean by that? I thought you meant that you had a Chibi connection between two Master?
Edit:
After retrying all connecting to the pc I found that I'd lost the slave settings somehow. What action commits the settings to the chibi memory?
If you go to "Configure Extension Type" and you reconfigure the extension to Chibi, all of the other configurations will be deleted. Perhaps you did that?
-
OK, dann meld dich auch mal bei info@tinkerforge.com mit deiner Bestellnummer für den alten Master Brick. Heute scheint der Tag der defekten Hardware zu sein
. -
Nur um auf nummer Sicher zu gehen:
Du hast:
Master Brick HW Version 1.1, der funktioniert mit Chibi.
Master Brick HW Version 1.0, FW Version 1.1.3, der funktioniert nicht mit Chibi.
Korrekt?
-
Mh, lets make sure everything is connected correctly:
Start with one Master Brick and one Chibi Extension, connect to USB and configure as Chibi Master (as shown in the Example).
Disconnect this. Take the other Master and the other Chibi Extension, connect to USB and configure as Chibi Slave (as shown in the Example), disconnect USB.
Then make the following stack: Step-Down Powersupply -> Master Brick -> Chibi Extension (configured as slave)
Plug power into Step-Down Powersupply, wait until the Stack is started (the Master stops blinking)
Then plug USB in the other Stack (Master Brick -> Chibi Extension)
If you do this, do you see both Master Bricks in the Brick Viewer?
If you do:
Unplug the USB connection and power and add the IMU Brick to the slave stack, then plug power back in, wait for startup, then plug USB into other stack. What do you know see in the Brick Viewer?
-
Hehe, naja das sollte sich mit einem einfachen kill -9 fixen lassen
.Ich teste mal gerade ein wenig welchen Spannungsabfall ich bekomme bei welchen Strömen, mal schauen was da so normal ist.
-
Wenn der Strom zu hoch ist fällt die Spannung ab, das würde ich schon erwarten.
Geht es denn wenn du sie getrennt an unterschiedlichen Ports schaltest?
Edit: Ah, Moment, ich hab Port gesagt aber ich meinte Pin. 20mA pro Pin nicht Port.
Edit2: Ich kann das hier gerade leider nicht nachstellen, ich hab keine Relais hier die klein genug sind das man sie direkt mit der IO16 schalten könnte.
Ich würde auf jedenfall versuchen die Relais nacheinander zu Schalten, also eins schalten, 100ms warten und dann das andere Schalten, damit nicht beide ihre Peak Ströme gleichzeitig ziehen.
-
Wirklich komisch. Der IO Expander (MCP23017) auf der IO16 kann pro Port maximal 20mA und insgesamt maximal 150mA schalten. Von den kleinen Relais solltest du also eigentlich sogar 16 Stk ohne Probleme schalten können (bei 7mA pro Relais). Ich könnte mir höchstens vorstellen das die beim Umschalten einen zu großen Peak haben?
Ich werde mal versuchen das hier nachzustellen.
-
It looks like the chibi aren't talking to each other - I'm guessing it should not read 0db?
It shouldn't. But the Chibi communication does work if you don't use the IMU, right? That probably means the IMU is not letting some signals through?
Can you try to put the Chibi Extension below the IMU in the slave stack?
-
The IMU should of course show up in the Brick Viewer.
Can you try to use the IMU in a stack (remove the Chibi Extension from the Slave Stack and plug a USB cable in the Master).
If it doesn't work there either there might be something wrong with the master.
-
@Holgi: Schreib mal eine Mail an info@tinkerforge.com mit deiner Bestellnummer, ich denke wir tauschen Relay, Power Supply und Master aus. Wenn bei dir jetzt die Firmware Versionen und die Kalibrierung OK sind sollte es eigentlich keine Probleme mehr geben.
Schon alleine dass der Master 6,6A im Stack misst ist komisch. Entweder mit dem Master ist irgendwas nicht in Ordnung oder da ist wirklich irgendwo ein Kurzschluss.
-
Hallo,
sam-ba gibt es leider nur für Windows und Linux x86.
Was sind denn die Probleme? Vielleicht lassen die sich ohne neu flashen lösen.
Edit: Und welche Firmware Versionen haben der Master und die Potis?
-
Öh, auf was ist denn der Analog zu Digital Konverter bei dir jetzt kalibriert? Am besten du lässt ihn einfach auf Default direkt nach dem neu flashen (Gain 4095 und Offset 0).
Eigentlich sollte er wenn nichts angeschlossen ist 0V/0A anzeigen und auch näher an den echten 9V dran sein. Die 6,6A passen natürlich auch nicht.
-
Hab das mal gerade nachgestellt, ich konnte das LCD zwar nicht zum abstürzen bringen aber die Spannung am LCD sinkt definitiv wenn das Relay an geht (sieht man schon am Kontrast).
Aber, wenn ich das ganze mit Step-Down Powersupply mache kann ich keinen signifikanten Spannungsabfall beobachten. Was für eine Spannungsquelle hast du denn an der Step-Down Powersupply angeschlossen? Die muss über der von USB liegen, sonst nimmt er trotzdem die USB Spannung (offiziell angegeben haben wir dafür ein Minimum von 6V)!
 .
. .
. .
.{kind=link}
Language support and tcp protocol documentation
in General Discussion
Geschrieben
Currently we are working on OS X support and the RS485 Extension, after that we will probably make the firmware for the Encoder Bricklets (they make the driver Bricks a lot more usefull) and then i intend to add more languages.
Yes, it is probably a good idea to document the protocol we are speaking. It is certainly possible to speak the protocol in every language, there is no magic involved.
One of our very first ideas was that a Brick could anounce itself as a mass storage device to the PC with a filesystem as described by you. But, as you said the events are problamatic and the events are very very important if you want any kind of performance over USB. For example if you have a few sensors in a stack over USB and you want to control a motor at the same time, you will be amazed how little bandwith there is left for the motor controlling if you are polling the sensors with a high frequency. Where as events with e.g a period of 10ms per sensor wouldn't be any problem.
However, it would be possible to write another daemon that sits behind the Brick Daemon and generates a /sys like filesystem that can be used from everywhere. It probably would have a lot in common with the generators we use to generate the language bindings. So if there is someone that would be interested in writing something like this, i would certainly help if there are questions or problems.