yuna
Members
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von yuna
-
Howdy, da hier viele Ihre Projekte vorstellen, möchte ich hier meines ebenso beschreiben, auf Hoffnung das es euch gefällt. Ich bin ehrenamtliche Inspirieren (Lehrerin) in der Hackerschool für Berlin und gebe Java Kurse. Die Kids spielen sehr gern mit Tinkerforge! Echt tolle Hardware auf die man sich verlassen kann. So können wir uns super in ruhe um die Software kümmern. Mit der Zeit haben wir uns Hilfen um die Tinkerforge API herum gebaut. Somit kommen wir Stück für Stück schneller voran. Diese ist hier zu finden: https://github.com/YunaBraska/tinkerforge-sensor Neben weiterer Entwicklung ist es unser zu Hohes Ziel diese API in Frameworks wie Spring Boot mit Spring Boot messaging einzubauen. Die Bricks/Bricklets sind mittels Wrapper in dieser Library generisch gehalten. Daher braucht man nicht lange nachzudenken und kann jedes Brick/Bricklet auf gleichen Weg ansteuern. Egal ob es ein Display oder ein RGB Button ist. Die Library soll auch davor etwas schützen, die Bricks/Bricklets direkt voll zu spamen. Vieles generiert sich in der Library von selbst. So auch die Dokumentation über die Sensoren (Wrapper von Brick/Bricklets) (https://github.com/YunaBraska/tinkerforge-sensor/blob/master/SENSOR_README.md Hier ein paar Beispiele: Stack verbinden: Mit Eventstream verbinden: Werte aus gesamten Stack holen Werte von Brick/Bricklets holen Mehrere Bricks/Bricklets verwenden (Versionen sind egal - Port Reihenfolge gewinnt) Bricks/Bricklet ansprechen Bricks/Bricklet mit limit von 2x pro Sekunde ansprechen - gut für loops oder wenn auf andere Events reagiert wird Mal schnell Decibel auf SegemtDisplay anzeigen lassen Mal schnell über alle Bricks/Bricklets loopen und status LEDs einschalten - super für KnightRider Effekte über die Bricks Bricks/Bricklet direkt ansprechen - falls wrapper nicht reicht Wir haben leider nur die Bricks/Bricklets in unsere Library angebunden, die wir auch wirklich besitzen und ins private Budget passen. Leider gehen reihenweise die alten Bricklets und Master Bricks kaputt, da auch die besten Kinder an den alten Steckverbindungen scheitern. Wäre ganz cool wenn die Master Bricks bald auch ein Update bekämen. Demnächst möchten wir ein Fahrzeug bauen. Einen einfachen, fahrbaren Untersatz zu finden, auf den man Tinkerforge bauen kann ist echt schwer zu finden. Zudem wir nur den Servo Brick haben und unsere 360 Grad Servos versuchen anzubinden... Wird spannend wie wir das auch Softwareseitig in die Library einfließen lassen.
-
Hi @ttt vielen Dank! Ich kenne mich mit Netzwerk nicht mehr so gut aus. Ich schaue es mir mal an. Das finde ich an Tinkerforge genial, Alles ist dokumentiert und keine Blackboxen. Wäre nur schön wenn die Library an einer Stelle gefixed wird, statt jeder für sich. Wenn ich Zeit hab schaue ich mir die Lösung mal genauer an. Vielen vielen Dank! @photron bitte sagt das ihr das fixt
-
Hi, danke für die Antwort! Genau das funktioniert nicht wenn ich viele Bricklet anschließe. Ich bekomme die automatischen Callbacks aber von 28 erscheinen nur noch 24 wieder. Ohne ein genaues Verhalten zu erkennen, steigen dazu willkürlich 1-2 weitere Bricks oder Bricklets wieder aus und enden in ein disconnect / reconnect loop. Mein Vorgehen war dann, dass ich bei Verlust eines Bricks oder Bricklets, einfach einen disconnect, connect und enumeration aufrufe. Doch der disconnect funktioniert nicht vollständig. Es bleiben Thread wie z.B. Callback-Processor offen. Nach einem zweiten Connect sind natürlich die Threads doppelt da. Meine Applikation kann leider keine fremden Threads schließen. Wenn ich jedoch mittels kill Befehl diese Threads stoppe, dann funktioniert alles wieder wunderbar. WLAN ist dann wieder noch ein anderes Thema... Wenn ich da den Reconnect schaffe, was dort sauberer funktioniert, dann kann ich mit dieser Lösung nicht mehr mit USB die bricks ansteuern - aus dem oben geschilderten problem. Es wäre sehr angenehm, wenn ich die Connection sauber schließen könnte. Dann ist ein reconnect viel einfacher für mich. @ttt hat scheinbar selbes Problem. Leider hat er nicht mehr die Lösung geschildert. Ich denk die Threads wurden etwas zu komplex aufgebaut. der CallbackThreadRestarter ist auch nicht gerade hilfreich wenn man disconnecten möchte. Aufbau: Ich habe alte Bricks (Master, Servo, IMU, IMU2) und sehr viele Bricklets alte sowie neuere. Es befinden sich keine MasterExtension oder RedBrick im Stapel
-
Hi Erik, das war es wirklich, danke! Ich arbeite so lang schon mit tinkerforge und nun dieser kleine Fehler. Ich bin Lehrerin bei der Hackerschool in Berlin und auf den einen Laptop hatten tatsächlich die Kids vergessen sich abzumelden. Ihr Programm lief in anderen Benutzer also im Hintergrund... Danke dir vielmals!
-
Hi ho, habe gerade ein SegmentDisplay bestellt gehabt. Seit Freitag zeigt dies plötzlich die Buchstaben "FEAr" an, sobald es ström bekommt. Auch Brieckviewer sieht dies. Egal was ich tu, alle meine Werte werden in Millisekundentakt von "FEAr" wieder überschrieben. Ist es kaputt oder habe ich einen ausersehen irgendeinen Modus angeschaltet?
-
kannst du Beispiel geben? z.B. Temperatur auslesen. ich verstehe das Konzept nicht wirklich wie ich das die callbacks nachbaue
-
oha, dann müsste man mal generell schauen woran es bei der API hängt um das zu fixen. Ich werd erstmal meine library fertig schreiben und dann die API als Kern auseinander nehmen... Würde es schon sinnvoll finden wenn die API gefixt werden könnte
-
Japp, nativ Java 8 mit Tinkerforge API 2.1.19 Am Anfang, um alles 100%tig zu verstehen, wollte ich noch keine Frameworks oder Threads nutzen, bevor ich freaky zeugs mache. Beim debugging komme ich immer zur IPConnectionBase Klasse, die mir die timeouts und andere events per Listener zusendet. Wäre nur gut wenn ich nicht gleich die API Debugger müsste, sondern irgendwo noch eine schraube drehen könnte, um ein reconnect zu forcen. Ich versuche gerade meine Library für Kids/Hackerschool zu verbessern. Wäre da sehr cool wenn die Kids nicht das Programm Neustarten müssten wenn der USB neu connected
-
Hi, ich habe 24 Bricklets angeschlossen an Servo, Master und IMU bricks. wen nun mein Programm bereits läuft bevor ich den USB Stecker einstecke oder ich den usb Stecker raus und wieder rein stecke, dann kommen nur ca. 12 Bricklets/Brickets wieder. Daraufhin habe ich mir gedacht das ich einfach bei Timeout ein ipconnection.disconnect und ipconnection.connect aufrufe, um wieder alle Bricks/Bricklets zu bekommen. Auch habe ich probiert enummeration wieder aufzurufen. Dadurch kommen alle 24 Bricklets wieder, doch verliert sekündlich ein Brick oder Bricklet dann plötzlich die connection. Bei Neustart des Programms ist es dann wieder kein Problem. Es schaut für mich aus, als würde das disconnect nicht vollständig alle Verbindungen trennen. Bei einer kleineren Anzahl von bricklets (ca. 6) funktioniert alles problemlos.
-
Hi, laut dem was ich im Schema sehen kann, ist beim RedBrick der PIN 13 an HDMI nicht angeschlossen. Warum? Das wäre doch perfekt für Sensor Steuerung! Gern auch gleich mit im BrickViewer und API Raspberry hätte das schon doch ich würde gern bei Tinkerforge bleiben...
-
Hi, ich möchte nun auch zwei stapel demnächst verbinden. Nun wollte ich kurz fragen ob es hier noch Probleme gibt mit der RS485 Master Extension. Vielleicht ist es auch besser 2x Ethernet Master Extension zu nehemen? oder sogar eine WLAN Extension, da der eine Stapel eb mittels RedBrick und Wlan Stick läuft. Welche wäre die stromsparendere Variante von denen?
-
Hi remotecontrol. ich danke dir und werde mir mitte diesem Monats die Fahrtregler bestellen. Dazu wahrscheinlich auch ein Tilt/Pan Kopf der hoffentlich irgendwie da dran geht. Das es da nichts einheitliches gibt... sowas wie ein Metallbaukasten nur stabiler und genauer. Im Dagu sind Encoder und keine ESCs... aber ich schließe ja direkt an. Dachte das wäre das selbe aber natürlich ist es das nicht.
-
also beim Dagu sind encoder drin. kann aber auch direkt den strom anschließen. kannst du mir genau sagen welchen Modellbau-Fahrtregler ich benötige oder ein ebay/amazonling geben? Dann kann ich das mal probieren. Habe noch nie was von Modellbau-Fahrtregler gehört
-
Beim Dazu Rover 5 war ich weit gekommen, sodass sich di Motoren mit dem Motorcontroller TRex Jr https://www.pololu.com/product/767 steuern ließen, jedoch nur ein mal, danach passierte nichts mehr. sobald die Motoren einmal gestoppt waren, schien es als würde kein Signal mehr ankommen. Ich musste immer am ServoBrick ein Reset durchführen um wieder einen Motor zu starten. Fehlersuche mit dem Forum hier ergab leider nichts.
-
Ich wusste gerade nicht wie der Brick heißt. Also beim Motorblick https://www.tinkerforge.com/de/shop/bricks/dc-brick.html steht 53mA Stromverbrauch und dafür benötige ich dann sichere zwei davon, während ich mit dem Servobrick genauere Kontrolle über die Motoren habe und nur einen benötige. Der Stapel soll ja nicht unendlich groß werden. Ich bin mit Tinkerforge total zufrieden bis auf das ich diesen Mist fahrbaren Untersatz nicht hinbekomme. Mit Lego kam ich schon sehr weit und ohne viel Bastelei auch zur Stabilität nur das Fahren....
-
Naja ne Küchenwaage ist zu einfach, sowas hab ich nicht Ich hatte zuletzt 3x verschiedene Rovers - zuletzt den Dagu Rover 5 Chassis 4WD probiert. Es gab immer Motorcontrollerprobleme. Ich versaute mir dann auch mehrmals den Motorcontroller und ServoBrick weil ich zu wenig Ahnung von habe. Normale Motoren kommen bei mir nicht in Frage, da die Controller von Tinkerforge mir zu viel Strom verbrauchen. Ich möchte einfach nur Programmieren und ein robust, flexiblen roboter haben. Weiterhin ausprobiert habe ich ein RaspberryPi, GrovePi, BrickPi, Lego EV3 von Lego usw. Alles recht zu unflexiebel. Der Pi hat zu wenig Power und ist total kompliziert. EV3 ist unzuverlässig, langsam, buggy (lejos), stromversorgungsprobleme, unhandliche sensoren. [...] Und nun bin ich wieder bei Tinkerforge da hier mehr Zuverlässigkeit und Hilfe herrscht. - Auch fexibel sowie stromsparend läuft und auf den GPIO gibts ja auch noch Hoffnung Am Liebsten wünschte ich mir, das jemand ein Gestell z.b. aus MakerBeam zusammenbaut. ich brauche ja nur ein rumpf mit 4 rädern und nen akkuhalter + ein schwenkbaren kopf wo dann die TinkerforgeSensoren drauf kommen. Ich bin nicht gut in hardware und bastelleien
-
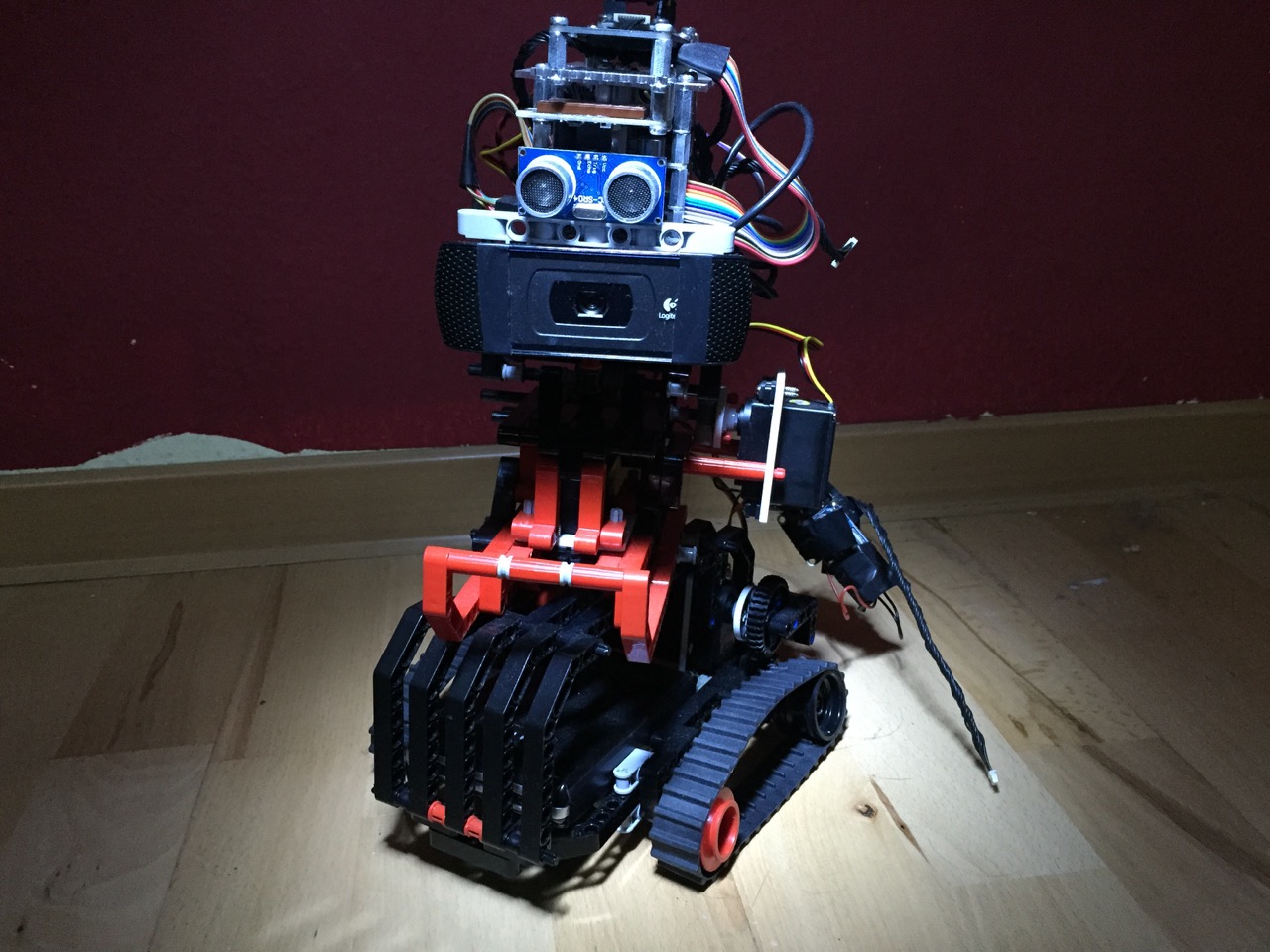
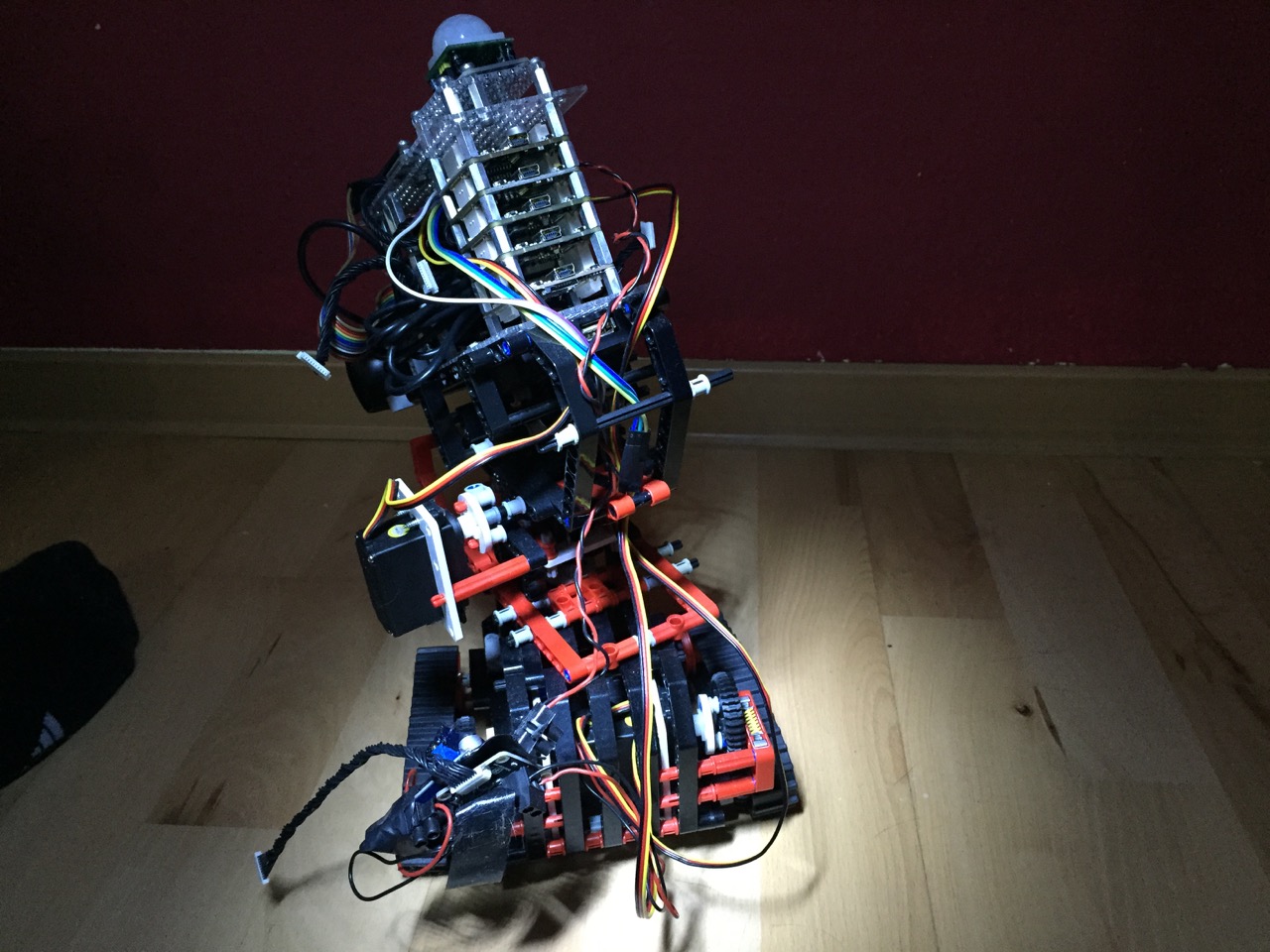
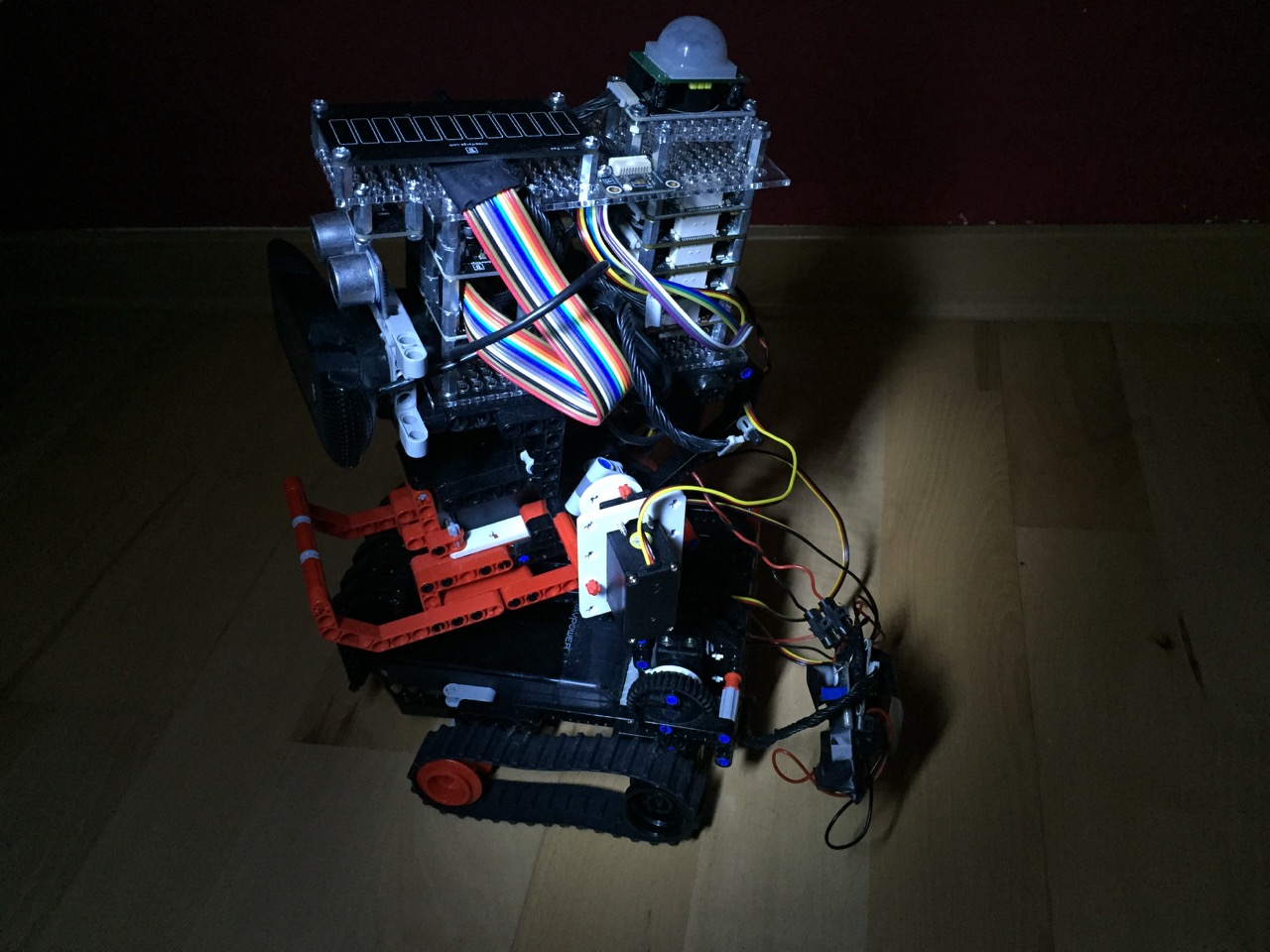
ja alles läuft normal wenn ich es anhebe. wie viel es wiegt weiß ich nicht, das wage bricklet habe ich leider noch nicht Aber es ist schon sehr schwer. Das meiste des Gewichts dürften die Kabel, der 230g Akku, und vor allem die Schrauben ausmachen. Da ich sicher ab und an neue Teile anbaue, mag ich nichts kleben. Im Rumpf ist der schwere Akku drin und oben alles nur Tinkerforge + die Kamera. Von der Kamera habe ich jegliche gewichte bereits entfernt. Mein Laptop wiegt 1,57 kg, der Roboter fühlt sich ca. gleich schwer an.
-
Hallo, nun melde ich mich mal wieder bei euch. Seit dem ich hier bei Tinkerforge bin, habe ich es noch immer nicht geschafft das mein Roboter fährt! Nun bin ich schon auf einfaches Lego umgestiegen, alles schaut super aus, Motoren drehen sich, aber das Lego hält das Gewicht der Bricks nicht aus. Die Legostangen von den Rädern biegen sich, die Zahnräder knirschen in einander,... ich bin total verzweifelt. Kann mir keiner helfen oder sagen wo ich Hilfe herbekäme? Für ein MakerBeam bin ich sicher auch zu dumm. Bei den vielen Versuchen die ich jetzt machte bin ich locker schon bei 1500€ oder mehr für nichts angekommen. Es muss doch möglich sein das ich ein paar Räder oder Ketten zum fahren bringen kann und auf dem Rumpf den Kopf mit Tinkerforgesensoren ausstatte Bitte bitte um Hilfe :'(
-
Genial ich habe das mit vielem Motoren bei mir auch, dass diese total Pfieepen. Ich habe 6-9V auf 1A ausprobiert. Bei disable ist der ton weg und bei enable fängts bei mir an. wenn ich dann noch die motoren drehen lasse wirds richtig laut. Wenn das nicht normal ist, wäre ich auch interessiert ob man dies vermeiden kann
-
soweit ich weiß kommt das aus China, da gibts sicher wieder Zoll und lieferprobleme. Zudem dort steht "nicht Rover 5 Chassis" aber in der Abbildung ein Rover 5 benutzt wurde. Ob der Kopf auch eine Webcam aushält und sich mittels servos bewegt ist auch nicht beschrieben. Es wäre schön noch alternativen zu sehen, auch wenn ich den Rover 5 bereits zu Hause habe - überzeugt bin ich davon nicht...
-
ich habe auch probleme an meinem laptop und muss zum flashen immer einen anderen computer nehmen. vielleicht hast du auch die möglichkeit einen anderen zu nehmen. Die LEDs sind beim flashen immer aus soweit ich das mitbekommen habe. Ich schwitze immer in der zeit während des flashens/update und hoffe das die LEDs wieder angehen
-
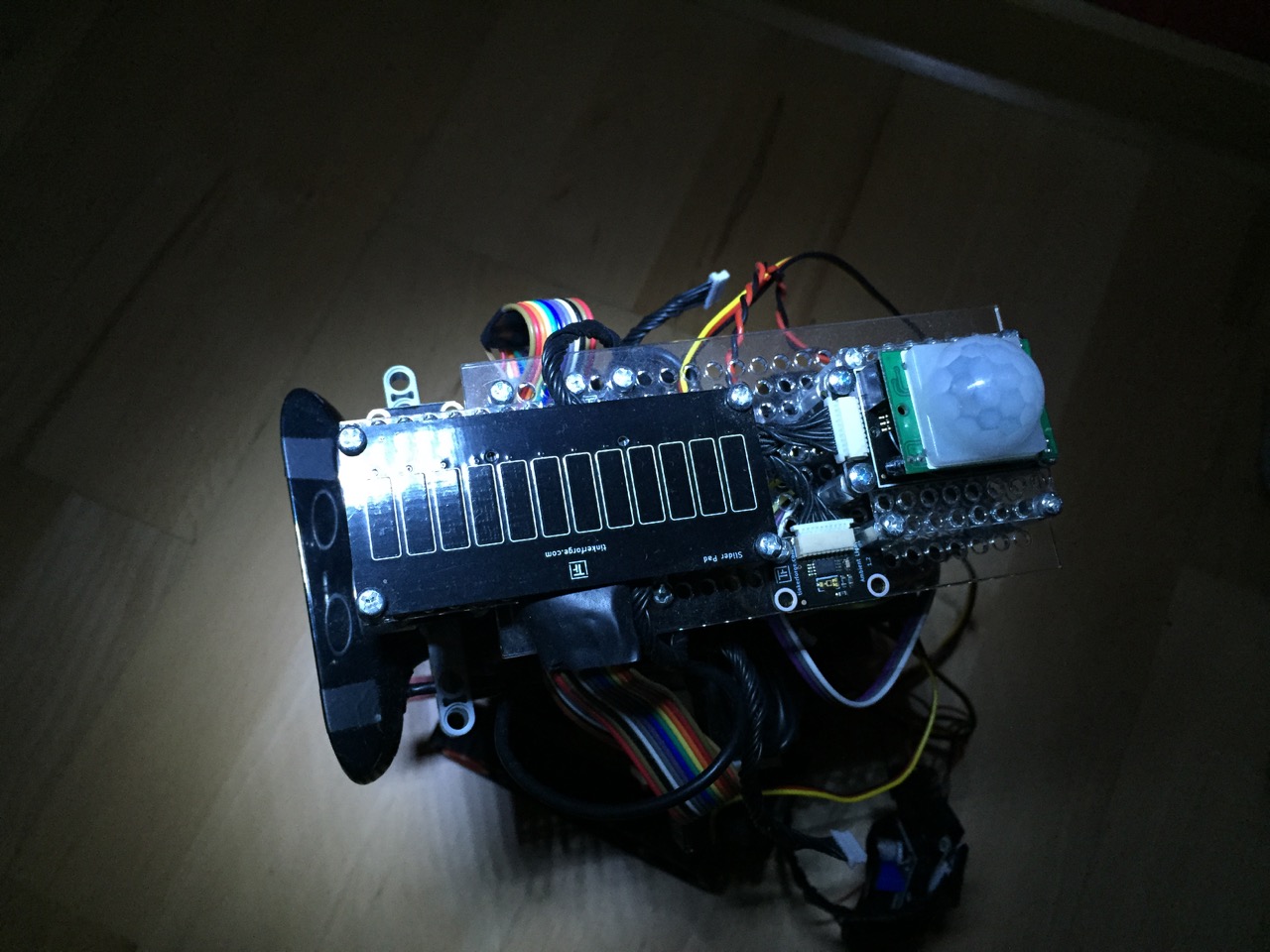
Hallo, ich habe meinen Roboter mit Tinkerforgeteilen ziehmlich einstauben lassen. Ich bin sehr frustriert das ich mit der Hardware ständig zu kämpfen habe und nicht wirklich zum programmieren komme. Nun möchte ich fragen ob mir jemand einen Roboterkörper bauen könnte oder wüsste wo ich einen herbekommen könnte. Meine Wunschvorstellung ist ein Roboter mit genügend Platz für Akk, Solar und Technik,(ca DIN A4 große Fläche kann es schon sein.) Dieser ist leider nicht in Deutschland verfügbar aber schaut schon brauchbar aus: http://de.aliexpress.com/item/DAGU-Service-Droid-robot-for-arduino/1501410535.html Ich hätte ganz gern vormontierte Tinkerforge kompatible Servo Motoren Für Kopf und Arme sowie Motoren zum Fahren. Geschwindigkeit spielt weniger die Rolle eher stromsparend sollte es sein. Achja und ich möchte die Technik und Kabellei ungern raushängen lassen, es wäre schon schön wenn es auch anschaulich ist. Hat jemand eine Idee oder kann jemand mir dabei helfen? Ich würde es auch bezahlen falls jemand es selbst für mich anfertigt. Hauptsache ich komme zum Ziel. Eure TechnikNoobine Yuna
-
Wäre natürlich noch einfacher, wenn man was an den GPIO Port anschließen könnte
-
Hallo, da bin ich mal wieder und frage euch ob es schon eine Lösung für IR Fernbedienungen gibt oder ich wieder was überlesen habe. Danke
-
Also für mich persönlich ist es mehr oder weniger egal welcher USB Anschluss da dran hängt. Eher würde ich mich erfreuen, wenn der Redbrick ein bis zwei USB Ausgänge mehr hätte, da der WLAN stick permanent einen Port besetzt. Aber das ist eine andere Story... Meine Beobachtungen sind folgende: Mini USB = groß, nicht oft vertreten aber stabil Micro USB = klein, sehr oft vertreten und verscheißt schnell Micro USB 3 = groß & kabel halten nur selten an den Geräten Type-C = klein, neu, reversible Falls eine Änderung kommt, dann würde ich eher zu Type-C tendieren, bevor der Micro USB auch noch ausstirbt und wieder was geändert werden sollte. Obwohl das ein wenig übertrieben scheint mit den wenigen Daten die übertragen werden. Mir sind schon zu schnell zu viele Micro USBs kaputt gegangen.