

jan
-
Gesamte Inhalte
500 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
2
Posts erstellt von jan
-
-
Also wenn du etwas suchst, was gegen Feuchtigkeit hilft, aber Luft(-feuchtigkeit) durchläßt und noch vor Staub schützt, da kann ich nur ne alte Jacke/Hose von Jack W. empfehlen. Oder zumindestens ein "Stoff"-Fetzen davon um den Sensor locker gewickelt. Das sollte doch eigentlich funktionieren.
-
, dass schaff ich nichtFirmware neu compilieren
Gibt es nicht die Möglichkeit, den DebugBrick dafür generell zu "mißbrauchen", dass wenn sich der Brick NICHT im Debug-Modus befindet, dort die seriellen Signale empfangen / gesendet werden?? Für die API bräuchte es doch nur 3 Befehle (SetSeriell(Baud, etc.,...), Send, Recieve).
Dann könnte man sich den seriellen Extra-Brick sparen und hätte eine menge Möglichkeiten um externe Hardware anzusprechen.
-
Hi,
ist es möglich über den Debug Brick serielle Befehle zu senden und zu empfangen? Weil da steht auch was mit serieller Konsole...
Über ein Stück Code (python :-)) würde ich mich freuen.
Jan
-
Hi,
gab es Probleme hinsichtlich der Bricklets
- bei Frost
- zu hoher Luftfeuchtigkeit
- Reif / Tau
bei den Wetterstationen?
Es handelt sich ja immerhin um Elektronik die plank liegt (vom Gehäuse mal abgesehen).
Danke fürs Feedback.
Jan
- bei Frost
-
Welche Kabellänge liegt zw. den beiden Stacks? Vielleicht hilf es schon die Baud-Rate zu reduzieren. Auf 1 Mbit oder 0,5 MBit.
-
Hi,
gibt es schon mehr Informationen über das geplante PTC-Bricklet (außer den Namen)? Funktion, Spezifikation?
Kann ich den PTC-Sensor dann als wetterfesten Temperatursensor verwenden?
-
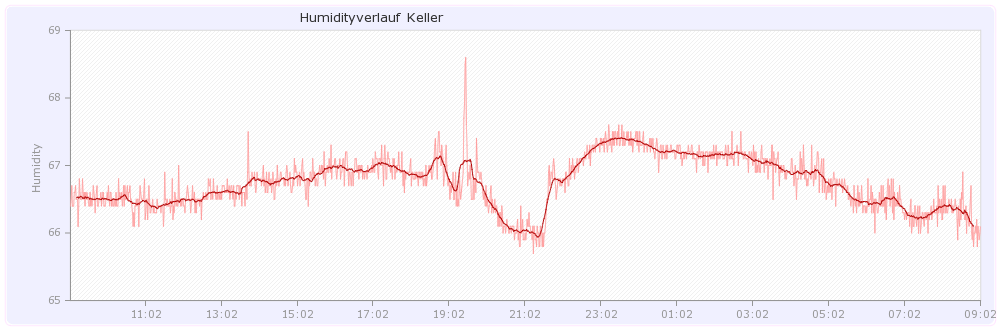
So, hab jetzt den gleitenden Mittelwert mit dazu genommen (über 21 Werte jeweils, also 21 Minuten).
Ich denke, das sieht das schon ganz gut aus.
-
Ok, danke für die Antworten. Dann werd ich das mal mit dem gleitenden Mittelwert probieren.
-
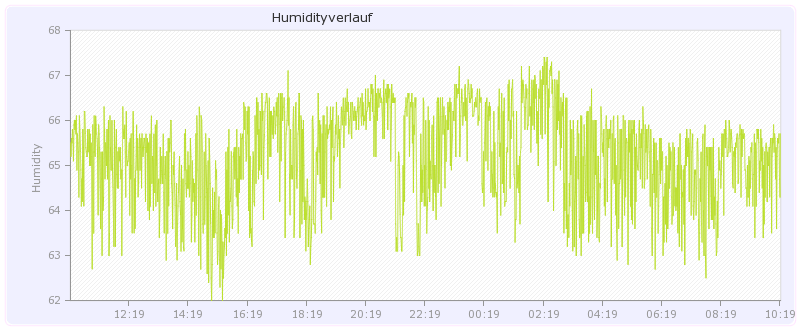
Kann das jemand bestätigen, dass da solche Schwankungen ermittelt werden? Die Werte werden minütlich aufgezeichnet.
Das ganze ist im Keller ermittelt.
-
Etwas fummelig, aber: Die "Knöpfe" müssen reingedrückt werden. Beim Kabel rein- und rausstecken in den Stecker.
-
Hi und willkommen,
ich persönlich würde PHP nur verwenden, zum Abfragen von Werten. Ich nehme es für meine Wetterstation. Im Zusammenhang mit einem Cronjob und einer Datenbank sehr zu empfehlen.
Für "Interaktion" (Aktion / Reaktion) habe ich Python "gelernt". War insgesamt ein Nachmittag um die ersten Programme laufen zu lassen.
Wenn du bereits Java oder C kennst, dann geht es auch darin auch super. Die Beispiele -> http://www.tinkerforge.com/doc/Downloads.html#bindings-und-beispiele sind eigentlich sofort lauffähig.
-
Da gab es schon mal eine Antwort. Wegen Frequenz und Störanfälligkeit war es da nicht möglich,
-
+1
Damit wäre der der Master voll belegt. Für den Ambient reicht es dann nicht mehr...
-
Wie lange würde so etwas überhaupt lauffähig sein bevor die Autobatterie gegen eine volle ausgetauscht werden muss?
bei 1A Last und angenommen Batterie mit 60Ah rein theoretisch 60h
hält der DC/DC Wandler der Step-Down-Powersupply die starke Spannung/Stromstärke einer 12 V Autobatterie aus???ja, ist nur von der Stromentnahme abhängig und von der Spannungs-Differenz Input <-< Output
Liefert die Step-Down-Powersupply geglätteten schönen gleichstrom so das die dahinter liegenden Geräte nicht durch schmorenich hatte bis jetzt keine Probleme, und wenn der StepDown vernünftig konzipiert ist, passiert da nichts
Ist es möglich mit der Step-Down-PSU die Spannung der Autobatterie zu messen und zu errechnen wie lange diese noch hält?Der StepDown liefert dir die InputSpannung, wenn die unter 9V fällt solltest du mal wieder aufladen
Ist es so ohne weiteres möglich den MicroUsb-Stecker für die Raspery-Pi an den grünenen 5V out port der Step-Down-Powersupply zu lötenja
Transportiert die RsPi die Leistung so gut zu den USB Geräten das diese so 1A abnehmen können (meine Theorie: Step-Down-PSU liefert 3A, Pi nimmt sich 700 mA bis 1A weg, es bleiben 2A für die USB-Geräte an der Pi) oder muss ich noch einen USB-Hub mit aktiver Stromversorgung hinter die Pi hängen und diese zusätzlich an die Step-Down-PSU klemmen??Der Pi liefert nur minimal Strom an die USB-Ports, für nen Stick und Wlan-Antenne reicht es, für ne HDD reichts nicht
-
Ähm, die sind wirklich ausverkauft... Wie sieht denn das Verhältnis von "Produziert" zu "Bestellt" aus??
-
Wenn du die Schrittmotoren getrennt ansteuern möchtest, benötigst du noch eine StepperBrick.
Das Netzteil sollte ausreichen um beide Stepper mit Strom zu versorgen.
-
Bei Reichelt gibt es jetzt ein Gehäuse für den Pi:
http://www.reichelt.de/index.html?ARTICLE=124752
sieht ganz solide aus und für den Preis...
-
Ja aber ganz ehrlich, wer benötigt denn an einem IMU-Brick einen "Rotationssensor"? Dieser wird doch nur in Verbindung mit einem DC-, Stepper- oder Servobrick benötigt. Und seine Aufgabe als "normaler" IO würde das Bricklet doch sowieso bringen. Es werden halt nur mehr Funktionen dann an den anderen Bricks zur Verfügung gestellt.
Mehrere FW-Varianten find ich nicht sinnvoll.
Im Shop kann der IO so verkauft werden wie bisher auch. In der Doku würde dann "einfach" darauf hingewiesen, dass mit Brick xyz noch weiteren Funktionalitäten zur Verfügung stehen.
-
Also ich finde, die "Frequenzmessung" müsste nur am Master funktionieren. Evtl. noch am DC-Brick.
Input Counter: Es wird in einem definiertem Zeitrahmen (kann evtl. per SW gesetzt werden) zw. 1/100s und 10s eintreffende Schaltänderungen gezählt (entweder High oder Low):
IO4.get_frequenz(zeitraum,High/Low) zeitraum in ms zw. 1 und ~65.000
IO4.get_frequenz_invers(High/Low) Zeitabstand zw. zwei Zuständen (High oder Low)
Zwei Möglichkeiten der Erfassung und Verarbeitung im Brick:
Entweder die Daten kontinuierlich in ein interne Tabelle geschrieben und dann die Daten aus der "Vergangenheit" abgefragt (Frequenz in den letzten 10 Sekunden, oder der letzte Zeitabstand)
oder die Daten werden erst erfasst, wenn der Befehl abgesetzt wird, also "messe ab jetzt 10 Sekunden die Anzahl der High-Signale". Da weis ich nicht was sich besser programmieren läßt. Auf alle Fälle wäre Variante 1 (Daten aus der Vergangenheit) schöner und schneller was die Abfrage betrifft, da die Werte ja bereits da sind.
-
Wie gesagt, hatte ich auch schon die Idee. Müsste sich nur jemand finden, der das mit umsetzt. Ich denke mal der Masterbrick kann da bestimmt bis 10kHz oder mehr gehen.
-
Du könntest mit einer Untersetzung arbeiten so 1:10 oder 1:100, dass sollte auf alle Fälle reichen.
Ansonsten könnte jemand (TF) die Software anpassen und bei den IO einen weiteren Typ hinzufügen (Input, Output + Input Counter). Dann wird in einem definiertem Zeitrahmen (kann evtl. per SW gesetzt werden) zw. 1/100s und 10s eintreffende Schaltänderungen gezählt (entweder High oder Low). Das kann dann auch gleich für Radencoder genutzt werden. Als 4. Typ (siehe oben) kann man evtl. nur die letzte Differenz zw. zwei Zuständen liefern.
-
Ich denke, dass wäre doch eine tolle Idee (für etwas später...) für einen Brick:
-
Kann man das nicht so implementieren, dass wenn an Port A der IMU ein BarometerBricklet hängt, dass die IMU diese Daten automatisch mit auswertet?
-
Unabhängig vom Preis, hoffe ich (bitte ich euch) das Modul im selben Formfaktor wie das Temp- und Humiditybricklet (15x25) herauszubringen. Dann kann man alle schön zusammenschrauben :-)

Wer kennt Anwendungsbeispiel für Analog Out Bricklet
in Hardware
Geschrieben
Hi,
wer kann mir ein paar Anwendungsbeispiele für den Analog Out Bricklet nennen?!
Eine Spannung zw. 0 und 5V zu erzeugen ist zwar schön und gut aber nur 24mA?
Was kann man "dahinter" noch anschließen, um das Bricklet nutzen zu können?
Freue mich über das Brainstorming :-)
Danke