rtrbt
Administrators
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von rtrbt
-
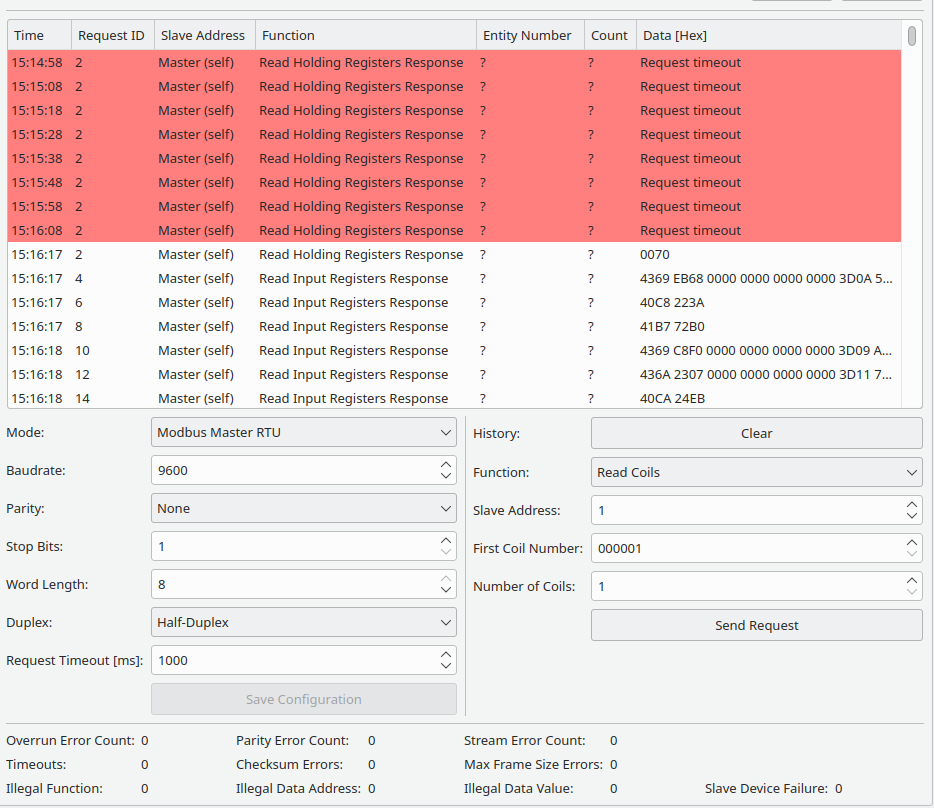
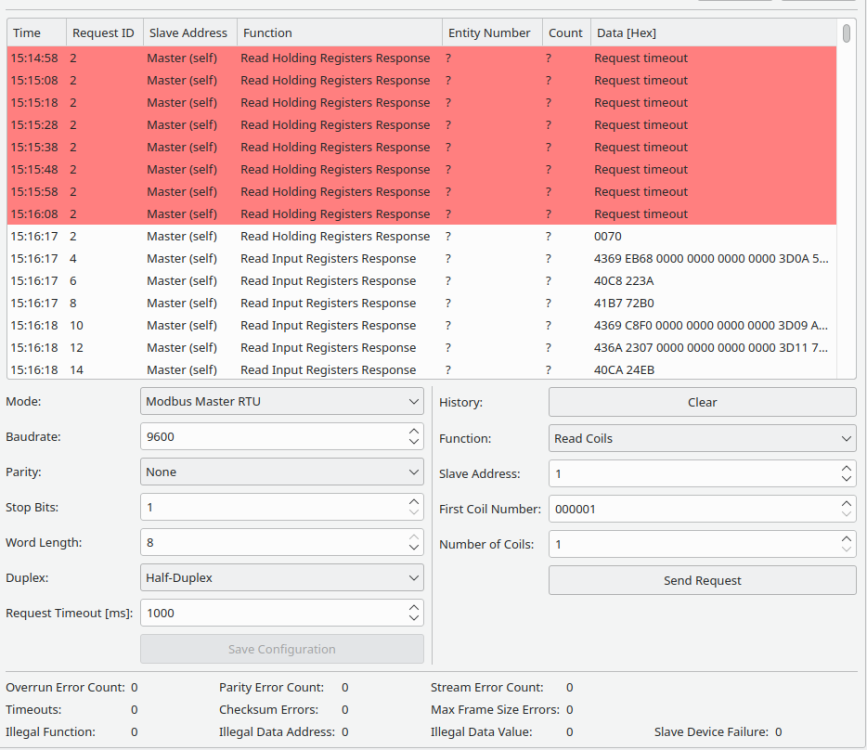
Dann würde ich erwarten, dass die Fehlerzähler hochzählen. Ich fürchte du musst dir mal Brick Viewer installieren, damit wir nachsehen können, was wirklich passiert. Anleitung dazu gibt's hier: https://www.tinkerforge.com/de/doc/Software/Brickv.html (Du brauchst nur den Brick Viewer, nicht Brick Daemon) In @poohnets Firmware ist der Proxy-Modus schon aktiv, d.h. du kannst, wenn du den Brick Viewer installiert hast ihn starten, unter Host die IP oder den Hostnamen der Wallbox eintragen, und dich mit "Connect" verbinden. Du solltest dann u.A. einen Tab für das RS485-Bricklet bekommen. In dem Tab werden die Pakete vom Zähler aufgeführt. Was mich jetzt interessieren würde ist, wenn du noch Auto-Detect (255) aktiv hast, ob dann regelmäßig ein "Read Holding Registers Response" auftaucht und wenn ja was der Data-Wert ist. Wenn du von Auto-Detect auf SDM72 (1) umschaltest, sollten stattdessen "Read Input Registers Response"-Einträge, also das Lesen dern Zählerwerte, auftauchen, weil die Kommunikation dann ja klappt. Das ganze sieht ungefähr so aus: Ich habe für die Fehler am Anfang den Zähler physisch getrennt. Danach klappt das Lesen des Holding Registers (Ich habe einen SDM630 mit Meter-ID 0070) und die Wallbox fängt an die "normalen" Zählerwerte zu lesen.
-
Das wundert mich auch. Die Erkennung funktioniert ja so, dass wir ein spezifisches Register vom Stromzähler lesen, in dem dessen Typ-ID steht. Es müsste also im Eventlog immer mindestens eine der folgenden Meldungen auftauchen SDM72DM detected. (oder anderer typ) Found unknown meter type 0x%x. Assuming this is a SDM72DM. (das würde die unbekannte ID ausgeben) Meter type override set to SDM72DM. (oder anderer typ) Wenn keine der Meldungen auftaucht, dann antwortet der Zähler nicht auf den Lese-Request. @Little_Company hattest du garkeine dieser Meldungen als du den type_override noch nicht gesetzt hattest? Wenn du das nochmal testen willst, kannst du die Auto-Erkennung wieder aktivieren. Mit der neuen Firmware: {"method":"PUT", "url":"/meter/type_override_update", "payload":255} bzw. mit der alten {"method":"PUT", "url":"/meter/type_override_update", "payload":"255"} Da du einen SDM72DM (V1) hast, vermute ich dass du einen hast, der als ID entweder 0x0200 (dann hätte es funktionieren sollen) oder 0x0084 (dann hätte die Found unknown meter type... Nachricht ausgegeben werden sollen). Das liegt vermutlich an https://github.com/Tinkerforge/esp32-firmware/commit/c3fa0ab6 Ich hatte da das Problem falsch verstanden (der Payload war davor ein String mit JSON drin, also z.b. mit escapten Anführungszeichen) und seit dem Commt ists direkt genestetes JSON. In eurem Fall also nicht {"method":"PUT", "url":"/meter/type_override_update", "payload":"1"} sondern {"method":"PUT", "url":"/meter/type_override_update", "payload":1} Nach kurzer Diskussion haben wir uns intern geeinigt, dass Variante 2 in der Tat sinnvoller ist, ich habe die Anleitung auf der Recovery-Seite gerade angepasst und editiere gleich meinen alten Post, falls den nochmal jemand findet.
-
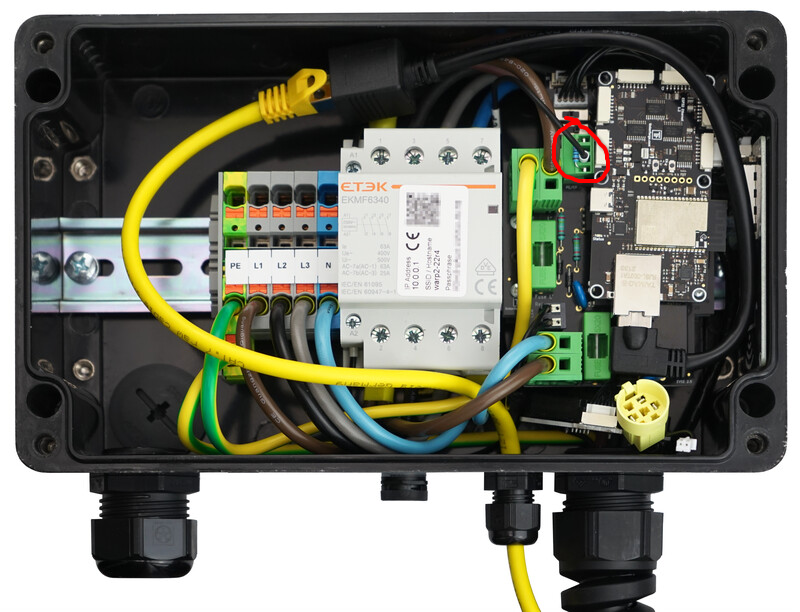
Moin, Auffällig im Debug-Protokoll ist, dass sich der CP-PE-Widerstand (darüber läuft die Kommunikation mit dem Auto) und auch der PP-PE-Widerstand (der gibt an wie viel Strom das Ladekabel verträgt) beide der Maximalwert (also nicht verbunden) sind. Das kann passieren, wenn der rot markierte Stecker in der Wallbox nicht richtig gesteckt ist: Mach am besten die Box einmal stromlos und sieh nach, ob der Stecker richtig steckt. Außerdem sollte zwischen der obersten und untersten Klemme des Steckers ein Widerstand gesteckt sein. (Blau im Bild)
-
Hm, das wird mit EVCC nicht funktionieren. Kurz zusammengefasst: EVCC kann eigentlich nur NFC/RFID-Tags über die Wallbox lesen, aber nicht Tags injecten. Es gibt da noch einen Spezialfall, aber nur für Keba-Wallboxen. Ich zitiere mal aus der Mail und D.h. selbst bei der Keba wird immer nur ein und dieselbe Tag-ID geschickt, egal welches Fahrzeug erkannt wurde. Wenn du also die Ladefreigabe/SoC-Laden über EVCC und zur Abrechnung pro Fahrzeug/Benutzer verschiedene NFC-IDs an die WARP2 schicken willst, musst du das entweder physisch machen (also das Tag dranhalten wenn du das Auto ansteckst), oder über die APIs mit einem Script, FHEM, o.Ä. steuern.
-
Ich bemühe mal den kurzen Dienstweg zu den EVCC-Entwicklern.
-
Damit ich das gerade richtig verstehe: Die NFC-Freigabe sollte komplett an EVCC vorbeigehen, wenn du nicht NFC-Tags benutzen willst, um damit für EVCC unterschiedliche Autos zu identifizieren. Oder willst du andersrum von EVCC aus NFC-Tags injecten, damit ein Ladevorgang auf der Wallbox auf einen Benutzer getrackt wird, ohne dass du ein physisches Tag dranhältst?
-
-
Hier die Kalibrierung aus den beiden Protokollen. Die Kalibrierung ist im unteren Bereich sehr stark (bei 6 Ampere muss ich 5 Volt abziehen). Kannst du mit dieser Kalibrierung nochmal die Protokolle erstellen? Dann würde ich das nochmal in unsere magische Kalibrierungs-Exceltabelle werfen, um zu verifizieren, dass die 5 Volt wirklich notwendig sind. Theoretisch würde das gehen, aber wir sollten hoffentlich nie in die Situation kommen, dass man das braucht. calibration.json
-
Habe das Problem gefunden und behoben. Fix kommt mit der nächsten Firmware. Das stimmt. Deshalb ist das Verteilungsprotokoll normalerweise deaktiviert. Da wir inzwischen auch einige andere relativ "gesprächige" Komponenten in der Firmware haben, müssen wir das mal angehen.
-
Das gehört nach https://www.warp-charger.com/evcc.html. Ist notiert: https://github.com/Tinkerforge/esp32-firmware/issues/266
-
Das ist leider immer schwierig herauszufinden. Rein technisch ist die ganze Kommunikation zwischen Wallbox und Auto nur, dass die Wallbox vorgibt, wie viel Strom maximal bezogen werden darf. Was das Auto dann wirklich tut ist ihm überlassen. Noch ein Gedanke: Versuch mal unter Wallbox->Ladeeinstellungen den Boost-Modus zu aktivieren.
-
Sieh mal nach, ob du schon die EVSE-Firmware 2.1.8 Beta 4 hast. Die sollte sich im Webinterface als 204.1.8 melden (Bei Beta-Versionen setze ich die Major-Version auf 200 + Betanummer), bzw du kannst in deinem Repo nachsehen in software/src/modules/evse/. Für die Kalibrierung selbst: (grad zusammenkopiert ;) ) (Folgendes ist mein grobes Verständnis. Für Details müsstest du @borg (Software) und @batti (Hardware) fragen ) Die Kalibrierung ändert, wie die Wallbox die zurückgemessene Spannung und damit den Widerstand, der vom Auto angelegt wird, interpretiert. Da gibt es das grundlegende Problem, dass die Wallbox den Widerstand nur messen kann, während das PWM High ist. D.h. bei kleinen Stromvorgaben wird die Messung schlechter. Es gibt voltage_diff (Differenz), voltage_div (Divisor) und voltage_mul (Multiplikator), die werden auf die CP-PE-Spannung angewandt, siehe z.B. hier: https://github.com/Tinkerforge/evse-bricklet/blob/36ddc94accdd6aae496a6cd115678d0d2a63998b/software/src/ads1118.c#L211C31-L211C31 resistance_2700 und resistance_880 werden auf den aus der Spannung berechneten Widerstand addiert. resistance_880 ist dabei ein Array, dass von 6 bis 32 Ampere in zwei-Ampereschritten verwendet wird, abhängig vom Strom den wir vorgeben (und damit dem PWM mit dem gemessen wird). Ist in der selben Datei weiter unten. Bisher haben wir noch jede Kombination aus Fahrzeugen an jeder Wallbox zum Laden bewegen können. Wenn ein anderes Fahrzeug so anders ist, dass es mit der Kalibrierung, die wir dir dann erstellen, nicht funktioniert, gib nochmal Bescheid, man kann dann vermutlich einen Mittelweg finden, der mit beiden funktioniert.
-
Dass EVCC 3,7 kW (230V * 16A = 3680W) anzeigt ist für mich ein Indikator, dass es keine Möglichkeit hat das zu messen. Was Sinn ergibt, weil du eine WARP2 Smart hast, d.h. ohne Zähler. Das heißt EVCC muss davon ausgehen, dass wenn es der Wallbox einen Ladestrom von 16 Ampere vorgibt, diese 16 Ampere auch verbaucht werden. Dass die Information, wie viel Strom das Auto wirklich zieht, fehlt, führt dann dazu, dass EVCC falsch berechnet, wie lange der Ladevorgang dauern wird. Was mir nicht klar ist, ist warum EVCC nicht aus der Fiat-API auslesen kann, wie viel Strom tatsächlich beim vom Auto gezogen wird. Alternativ kann man in der Wallbox noch den Stromzähler nachrüsten um sie praktisch von einer WARP2 Smart in eine WARP2 Pro zu verwandeln. Für PV-Überschussladen (unabhängig von den Fahrzeug-APIs) ergibt das meistens Sinn. Oh sorry, hatte den Post davor übersehen. Wenn du das Schütz hörst und das Fenster auf rot (also stromführend) geht, dann funktioniert das Schütz höchst wahrscheinlich. D.h. das Problem ist vermutlich, dass die Schützüberwachung nicht oder nicht richtig angeschlossen ist. Es müssen die "hinteren" Kontakte (23, 24, siehe Bild) an den Eingang 4 des Energy Managers angeschlossen sein.
-
Der zweite Bug entsteht (auch) dadurch, dass die Namensauflösung per mDNS relativ lange dauert. Das ist ein bekanntes Problem. Ein Ansatz das zu lösen wäre, die Pakete, die diese Meldungen auslösen: Received packet from unknown 192.168.1.75. Is the config complete? zu akzeptieren. Das hat noch ein paar Fallstricke, steht aber auf der Liste. Aus Ubersichtsgründen habe ich ein eigenes Issue dafür aufgemacht: https://github.com/Tinkerforge/esp32-firmware/issues/264 (davor war das Teil von #225) Prinzipiell gebe ich dir aber recht, dass überhaupt schon 20 Sekunden nach Neustart Strom umverteilt wird, wenn noch nicht alle Wallboxen wieder aufgetaucht sind, ist definitiv nicht gut. Habe dafür auch ein Issue aufgemacht:https://github.com/Tinkerforge/esp32-firmware/issues/263 und den Debug-Report anonymisiert angehangen. Noch eine Sache aus dem Log: 2023-08-01 15:58:19,628 Charge manager watchdog triggered! Received no available current update for 30000 ms. Setting available current to 10000 mA Der Watchdog hat einmal ausgelöst, danach kommt aber nicht sofort eine Stromumverteilung. D.h. zwischen dem Ablaufen der 30 Sekunden des Watchdogs und der nächsten Stromverteilung (das kann zwischen 0 und 10 Sekunden später passieren) kam dann doch noch ein neuer Stromwert an. Würde ich erstmal auf den WLAN-Empfang schieben. Wobei du einen RSSI-Wert von -61 hast. Das ist nicht so schlecht. Unabhängig von den anderen Sachen ist das ursprüngliche Problem gut sichtbar: 2023-08-01 15:57:19,494 Redistributing current 2023-08-01 15:57:19,495 1 charger requests current. 19950 mA available. 2023-08-01 15:57:19,495 stage 0: Calculated target for eins (127.0.0.1) of 6000 mA. 13950 mA left. 2023-08-01 15:57:19,505 stage 0: 13950 mA still available. Recalculating targets. 2023-08-01 15:57:19,516 stage 0: Recalculated target for eins (127.0.0.1) of 16000 mA. 3950 mA left. 2023-08-01 15:57:19,526 stage 0: 3950 mA still available. Attempting to wake up chargers that already charged their vehicle once. 2023-08-01 15:57:19,536 stage 2: Unthrottled eins (127.0.0.1) to 16000 mA. 2023-08-01 15:57:20,696 Charger state changed from 1 to 2 2023-08-01 15:57:21,727 Charger state changed from 2 to 3 2023-08-01 15:58:19,628 Charge manager watchdog triggered! Received no available current update for 30000 ms. Setting available current to 10000 mA 2023-08-01 15:59:29,573 Redistributing current 2023-08-01 15:59:29,573 1 charger requests current. 19950 mA available. 2023-08-01 15:59:29,573 stage 0: Calculated target for eins (127.0.0.1) of 6000 mA. 13950 mA left. 2023-08-01 15:59:29,584 stage 0: 13950 mA still available. Recalculating targets. 2023-08-01 15:59:29,594 stage 0: Recalculated target for eins (127.0.0.1) of 6000 mA. 13950 mA left. 2023-08-01 15:59:29,604 stage 0: 13950 mA still available. Attempting to wake up chargers that already charged their vehicle once. 2023-08-01 15:59:29,615 stage 1: Throttled eins (127.0.0.1) to 6000 mA. 2023-08-01 15:59:29,625 stage 1: Throttled a charger. Skipping stage 2 2023-08-01 15:59:29,635 Skipping stage 2 Um 15:57 wird Strom verteilt, das führt dazu, dass die eine Wallbox (habe die in eins und zwei umbenannt) anfängt zu laden. Deshalb startet der 120 Sekunden-Countdown der Startphase. Die erste Stromverteilung danach (15:59) gibt dann wieder nur 6 Ampere frei. Ich melde mich nochmal, wenn ich mehr weiß. Danke schonmal für die Hilfe bei der Fehlersuche :)
-
Das sollte so funktionieren, ja. Der Energy Manager benutzt das Lastmanagement-Protokoll um die CP-Trennung auszulösen. Das entsprechende Paket wird vom EVSE Common-Modul verarbeitet und das wiederrum ruft EVSE::set_control_pilot_disconnected auf. Da gibst du den Befehl an EVSE CPC weiter soweit ich das sehe -> Sollte klappen.
-
Laut der Logs sieht es in der Tat so aus, als ob das Schütz zum Phasenumschalten entweder nicht richtig angeschlossen oder defekt ist. Eine Sache kannst du noch probieren: Wenn das Schütz umschaltet, sollte das hörbar sein. D.h. du kannst dich neben den Schaltschrank stellen und dann EVCC von ein- auf dreiphasig umschalten lassen und mal lauschen. Bezüglich des Ladevorgangs: Der Fiat scheint ein etwas seltsames Ladeverhalten zu haben. Ich habe spontan hier: https://www.goingelectric.de/forum/viewtopic.php?p=1806963#p1806963 Leute mit einem ähnlichen Problem gefunden. Da du das SoC-Laden von EVCC benutzt, müsstest du vermutlich mal die EVCC-Entwickler fragen, was da genau los ist: https://github.com/evcc-io/evcc/discussions Sinnvollerweise fixen wir aber erst das Schützproblem ;) Was ich aus dem goingelectric-Thread rauslese ist, dass der Fiat deutlich weniger Strom zieht, als ihm vorgegeben wird, und die Verlustleistung bei niedrigen Strömen scheint hoch zu sein. Ich vermute jetzt, dass EVCC die Ladeleistung runtergedreht hat, weil die SoC-Ziel-Berechnung sagt, dass noch viele Stunden Zeit sind und du deshalb lange im ineffizienten Bereich geladen hast. Du kannst den Minimalstrom aber konfigurieren: https://docs.evcc.io/docs/reference/configuration/loadpoints/#mincurrent Beim Renault Zoe macht es z.B. keinen Sinn dreiphasig mit weniger als ~ 9A zu laden, weil die Effizienz dann in den Keller geht. Eventuell gibts für den Fiat vergleichbare Erfahrungswerte. Edit: Habe vergessen den 2. goingelectric-Thread zu verlinken: https://www.goingelectric.de/forum/viewtopic.php?p=1775589#p1775589
-
Die Pinleiste scheint kompatibel zum HAT Brick zu sein. Zumindest die SPI-Pins die wir auf jeden Fall brauchen (19, 21, 23) sind korrekt. Es kann sein, dass das HAT nicht automatisch detektiert wird. Wenn das der Fall ist, musst du dir eine Konfiguration für den Brick Daemon schreiben, der den CS-Pins für jeden Port korrekt setzt. Das ist hier: https://www.tinkerforge.com/de/doc/Hardware/Bricks/HAT_Brick.html#kompatibilitat-zu-anderen-boards-und-images erklärt. Das sollte also funktionieren (alle Angaben ohne Gewähr ;) ) Was ich noch gefunden habe: https://wiki.radxa.com/Rock4/hardware/gpio Das scheint aber laut https://wiki.radxa.com/Rockpi4/hardware/spi_flash eher ältere Modelle zu betreffen.
-
Stimmt, die Variable wird bei Stream-Funktionen in beide Richtungen generiert, aber nur bei Streams vom Bricklet zum PC verwendet. Gefixt: https://github.com/Tinkerforge/generators/commit/aaf854e9 Das sind alles gute Punkte. Muss ich mit meinem Kollegen mal besprechen ob und wenn ja wie viel davon wir übernehmen können. Wir melden uns dazu nochmal ;)
-
Erstelle bitte mal ein Energy Manager-Protokoll. Dazu unter System->Debug bei "Protokoll erstellen" auf Start klicken, dann in EVCC auf dreiphasig umstellen, warten bis der Schützfehler auftritt und dann auf Stop + Download klicken. Wichtig: Das Protokoll wird in deinem Browser-Tab gesammelt. Den musst du also zwischen Start und Stop offenlassen.
-
Das ist in der Tat ein Fehler, danke für den Hinweis! Die Fehlerbehandlung, die das streamStateObject zurücksetzt usw. gibt es an mehreren Stellen, alle außer dieser sind aber in Hilfsfunktionen, die device als Parameter übergeben bekommen. Das ist laut git blame seit 2017 niemanden aufgefallen. Ich habe das im Generator gefixt: https://github.com/Tinkerforge/generators/commit/fdcc67f1b8f1f210a7aa0d6944f633cab6a9318d und dir neu generierte Bindings angehangen. Versuchst du auch die Interna zu typisieren, oder nur das Interface nach außen? Eventuell könnten wir das auch generieren. Das für 150 Geräte von Hand zu schreiben stelle ich mir anstrengend vor ;) tinkerforge_javascript_bindings_2_1_34.zip
-
Das funktioniert mehr oder weniger identisch: Du rufst modbusMasterReadHoldingRegisters und bekommst dann das entsprechende Callback mit der Antwort.
-
Das sieht nach dem Problem hier aus: Du kannst testweise mal die dort angehangene Firmware ausprobieren (ohne Phasenumschaltung). Wenn dann, nachdem dein Auto "voll" (oder eben auf dem konfigurierten SoC) ist, keine neuen Ladevorgänge mehr entstehen, ist es dieses Problem.
-
Anstatt dass du die Modbus-Pakete von Hand parst, kannst du das RS485-Bricklet im Modbus-Master-Modus benutzen. Ein Beispiel dafür gibts hier: https://www.tinkerforge.com/de/doc/Software/Bricklets/RS485_Bricklet_JavaScript.html#modbus-master-node-js (bzw. weiter unten in der nicht-NodeJS-Variante)
-
Eventuell. Da muss ich meinen Kollegen, der das programmiert hat, mal fragen. Der ist aber noch im Urlaub.
-
Das ist beabsichtigt. Laut Anleitung heißt ein grünes "Atmen" (also langsameres Pulsieren als das Blinken im Fehlerfall), dass alles OK ist und entweder PV-Überschussladen deaktiviert ist, oder gerade Strom ins Netz eingespeist wird. Soweit ich das im Code sehe müsste das aber auch schon immer so gewesen sein. Es gibt keinen Standby-Modus o.Ä. der nach einer Weile das "Atmen" stoppt.