

rtrbt
-
Gesamte Inhalte
1.544 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
150
Posts erstellt von rtrbt
-
-
Die zweite CP-Trennung wenn das Auto nicht reagiert ist in WARP2 2.3.0 enthalten. Fehlte aber in den Changelogs, habe ich gerade hinzugefügt.
Die Logs sehen wirklich seltsam aus. Der 3 -> 2 Wechsel muss von deinem Auto verursacht werden (wenn die Wallbox, der Energy Manager oder EVCC blockieren würden, dann wäre es ein 3 -> 1 Übergang), es sei denn durch die Test/Beta-Firmwares stehen sich Energy Manager und Wallbox gegenseitig im Weg. Aktualisiere sicherheitshalber mal Wallbox und Energy Manager auf 2.4.0 bzw. 2.1.0.
On 4/21/2024 at 10:51 AM, wolkenschaufler said:Komisch ist das bei Zeitstempel 10:40:16,023: Warum wird da freigegeben, aber ein Sekunde nachdem er lädt, wieder deaktiviert?
Weißt du noch, ob das Auto nach dem 2->3 Übergang um 10:42:48,215 weitergeladen hat? (Kannst du eventuell noch im Ladetracker sehen) Bzw. als Gegentest: Wenn du das Auto das nächste Mal voll geladen hast (sodass die Wallbox im "Ladebereit"-Zustand, also 2 ist), zieh es mal ab, warte ein paar Sekunden, stecke es wieder an und achte darauf, ob das Schütz nochmal kurz schaltet und dann wieder abschaltet.
-
Firmware: WARP Energy Manager 2.1.0
- SMA Speedwire als Stromzähler-Datenquelle hinzugefügt
- Modbus TCP als Stromzähler-Datenquelle hinzugefügt Liste unterstützter Stromzähler
- Unterstützung von MQTTS und MQTT über WS(S) hinzugefügt
- HTTP-Automatisierungsbedingung hinzugefügt
- Weitere Zoomstufen für den Plot des Ladeverlaufs hinzugefügt
- Buttons für Phasenumschaltung zur Statusseite hinzugefügt, wenn externe Steuerung aktiviert ist
- Modal für WLAN-Scan-Ergebnisse hinzugefügt
- SunSpec: Unterstützung mehrerer Geräte im selben Registersatz hinzugefügt
- SunSpec: Unterstützung mehrerer Instanzen des selben Models in einem Gerät hinzugefügt
- SunSpec: Boot-Scan-Robustheit verbessert
- SunSpec: Skalierung des Leistungsfaktors repariert
- SunSpec: Unterstützung für DER-Modelle 701, 713 und 714 hinzugefügt
- SunSpec: Kompatibilität mit SolarEdge- und Sungrow-Wechselrichtern verbessert
- SunSpec: Robustheit der Gerätesuche verbessert
- WiFi Enterprise: EAP-TLS-Verbindungen mit Client-Key repariert
- DSZ15DZMOD-Unterstützung der veralteten Stromzähler-API repariert
- Automatische Kanalauswahl des WLAN-Access Points repariert
- Anzeige aktiver Phasen bei negativem Phasenstrom repariert
- Min+PV-Lademodus mit umkonfiguriertem Minimalstrom repariert
- Automatische Skalierung nicht gestapelter Graphen repariert
- Behoben, dass PV-Lademodus nach einem drei- zu einphasig Wechsel den Ladevorgang gestoppt hat
- Lastmanagement: Spielraum des Phasenstroms verdoppelt wenn exakt eine Wallbox lädt
- Modulname zu Ereignislog-Nachrichten hinzugefügt
- Menüstruktur des Webinterfaces überarbeitet
- Label/Inhaltsteilung auf Status- und Unterseiten vereinheitlicht
- Platzhalter eingefügt, wenn Zeit der Echtzeituhr nicht gestellt ist
- Anzeige deaktivierter Automatisierungsbedingungen und -aktionen hinzugefügt
- Sichtbarkeit eines leeren Leistungsgraphen repariert
- Sichergestellt, dass Energiebilanz-Graphfarben bei Neuladen des Webinterfaces gleich bleiben
- Möglichkeit zum Reaktivieren des 802.11b-Modus für besseren WLAN-Empfang hinzugefügt
- NTP-Serverkonfiguration über DHCP repariert
- Behoben, dass auf der Statusseite 0 W als Leistungsaufnahme angezeigt wurde, wenn keine Daten verfügbar sind
- Behoben, dass MQTT als deaktiviert angezeigt wurde, wenn noch kein Verbindungsversuch erfolgt war
- Behoben, dass WLAN-Scan nicht als fertig angezeigt wurde, wenn kein WLAN gefunden wurde
- Automatisches Neuladen des Web Interfaces bei Firmware-Versionsänderung behoben
- Voreingestellte NTP-Server aktualisiert
- NTP-Synchronisierungsgeschwindigkeit erhöht
- Sichergestellt, dass gerade bezogene NTP-Zeit nicht mit möglicherweise schlechterer RTC-Zeit überschrieben wird
- Robustheit des Web-Servers verbessert
- Übersetzungen verbessert
- Unterstützte Länge von HTTP-Request-Headern auf 2 Kilobyte erhöht
Download: WARP Energy Manager 2.1.0
-
Firmware: ESP32 Ethernet Brick 2.0.3
Download: ESP32 Ethernet Brick
-
-
Firmware: ESP32 Ethernet Brick 2.0.3
Download: ESP32 Ethernet Brick
-
 1
1
-
-
-
1
-
-
Firmware: WARP 2.4.0, WARP2 2.4.0 und WARP3 2.4.0
- (nur WARP1) PV-Überschussladen hinzugefügt
- SMA Speedwire als Stromzähler-Datenquelle hinzugefügt
- Modbus TCP als Stromzähler-Datenquelle hinzugefügt Liste unterstützter Stromzähler
- (nur WARP2/WARP3) Maximale Anzahl konfigurierter Stromzähler auf 5 erhöht
- Weitere Zoomstufen für den Plot des Ladeverlaufs hinzugefügt
- SunSpec: Unterstützung für DER-Modelle 701, 713 und 714 hinzugefügt
- SunSpec: Kompatibilität mit SolarEdge- und Sungrow-Wechselrichtern verbessert
- SunSpec: Robustheit der Gerätesuche verbessert
- Möglichkeit zum Reaktivieren des 802.11b-Modus für besseren WLAN-Empfang hinzugefügt
- NTP-Serverkonfiguration über DHCP repariert
- Behoben, dass auf der Statusseite 0 W als Leistungsaufnahme angezeigt wurde, wenn keine Daten verfügbar sind
- Unnötige Wartezeit bei Doppelklick zum Wechsel des Lademodus behoben
- EVSE-LED-API und Automatisierungs-Aktion repariert, (nur WARP3) Farbauswahl hinzugefügt
- Behoben, dass MQTT als deaktiviert angezeigt wurde, wenn noch kein Verbindungsversuch erfolgt war
- Fehlenden Modbus-TCP Discrete Input für (noch nicht implementierte!) CP-Trennung hinzugefügt
- Behoben, dass WLAN-Scan nicht als fertig angezeigt wurde, wenn kein WLAN gefunden wurde
- (nur WARP3) Gemeldete Schützzustand-Fehlercodes repariert (Durch Update auf Ladecontroller-Firmware 2.2.4)
- (nur WARP2/WARP3) Sichergestellt, dass Stop über Front-Taster das Laden blockiert, wenn Wallbox im Zustand “Ladebereit” ist (Durch Update auf Ladecontroller-Firmware 2.2.4)
- (nur WARP3) Sichergestellt, dass PV-Überschussladen nicht sofort auf dreiphasig wechselt, wenn der Ladecontroller gerade auf einphasig gewechselt ist, weil das Fahrzeug nur einphasig lädt (Durch Update auf Ladecontroller-Firmware 2.2.4)
- (nur WARP2/WARP3) OCPP: Zeitstempel von MeterValues-Nachrichten vereinheitlicht
- Automatisches Neuladen des Web Interfaces bei Firmware-Versionsänderung behoben
- Voreingestellte NTP-Server aktualisiert
- NTP-Synchronisierungsgeschwindigkeit erhöht
- Sichergestellt, dass gerade bezogene NTP-Zeit nicht mit möglicherweise schlechterer RTC-Zeit überschrieben wird
- Robustheit des Web-Servers verbessert
- Übersetzungen verbessert
- Modbus-TCP-Dokumentation verbessert
- (nur WARP2/WARP3) Unterstützte Länge von HTTP-Request-Headern auf 2 Kilobyte erhöht
Download: WARP 2.4.0 bzw. WARP2 2.4.0 bzw. WARP3 2.4.0
-
Über das Smart Charging Profile läuft die Steuerung im Sinne von der Netzbetreiber kann damit den Ladestrom einstellen. Trotzdem funktioniert OCPP so, dass ein Ladevorgang zwingend mit einem NFC-Tag freigegeben werden muss. Ob ein Tag berechtigt ist entscheidet der OCPP-Server (lies: dein Netzbetreiber). Ich spekuliere jetzt mal, dass das den typischen Stadtwerken egal ist, wer an einer privaten Wallbox lädt und sie deshalb einfach bei jedem Tag den Ladevorgang freigeben.
Da wir die OCPP-Implementierung kontrollieren, könnten wir natürlich einen Modus einbauen, der die ganze NFC-Freigabe überspringt und ggfalls ankommende RemoteStopTransaction-Anfragen des Servers ignoriert. Damit könnten die Stadtwerke nur noch den Ladestrom kontrollieren, aber nicht mehr einen Ladevorgang komplett stoppen. Das wäre aber nicht nach OCPP-Spezifikation (und man müsste es erst implementieren).
On 5/8/2024 at 9:25 AM, borg said:Ich Frage mich ob die nicht vielleicht auch damit einverstanden wären dein Internet zu nutzen für die Anbindung solange du damit einverstanden bist. Dann hätten Sie ja auch nicht die laufenden Kosten der SIM Karte.
Laut der PDF (Seite 10/11) geht das nicht:
"Voraussetzung für die Anbindung von kommunikationsfähigen Ladestationen an das zentrale Verwaltungssystem ist die Anbindung der Ladesteuerung an das Mobilfunknetz [...] ergeben sich folgende Möglichkeiten:
(1) Verfügt die Ladeeinrichtungen über einen SIM-Karten Slot, kann die Stromnetz Hamburg GmbH bzw. der entsprechende CPO eine SIM-Karte in die Ladestation einlegen und die notwendige Konfiguration der Datenverbindung vornehmen(2) Verfügt die Ladeeinrichtung über keinen SIM-Karten-Slot, kann ersatzweise ein UMTS Router nahe der Ladestation (am Zählerplatz im Haus) errichtet werden und in diesen die SIM-Karte einlegt werden. Der Router dient dabei als Gateway für den Verbindungsaufbau"
Ob die das wirklich so strikt auslegen, wie es da steht ist natürlich unklar.
-
Das ist korrekt. Der Zähler misst nur eine Teilmenge der Werte, die wir über Modbus melden können. Das ist 1:1 die "veraltete" Stromzähler-API, deren all_values-Liste die Werte eines SDM630 sind. Werte, die der DSZ15DZMOD nicht lesen kann bekommst du als NaN zurückgegeben.
Edit: Das siehst du auch in der all_values-Dokumentation: Das Beispiel ist von einem SDM72V2, der auch nicht alle Werte eines SDM630 ausgibt. Deshalb sind im Beispiel hier: https://docs.warp-charger.com/docs/mqtt_http/api_reference/meter/#meter_all_values_warp1 manche Werte null. (in JSON werden NaN als null ausgegeben)
-
On 5/4/2024 at 5:08 PM, tugsi said:
SmartHome mit ioBroker
Benutze dann am besten einen anderen MQTT-Broker, als den, den es für ioBroker gibt. Der von ioBroker macht nur Probleme, siehe z.B.
oder
https://github.com/evcc-io/evcc/issues/13590
-
On 5/5/2024 at 7:17 PM, till said:
Ok, ist kein Problem, der Wert geht selbständig hoch wenn das Auto mehr abfordert.
Genau. Die Idee ist, dass wenn du zwei Wallboxen hast und an einer lädt ein Auto langsam, weil z.B. der Akku voll wird, dass der überschüssige Strom zur anderen Wallbox verteilt werden kann. Deshalb geben wir (natürlich nur wenn die entsprechende Box einen Zähler hat) einem Auto nur dessen Strombezug + 3 Ampere, damit es mehr Strom anfordern kann.
-
Hast du die Wallbox in EVCC als WARP oder WARP3 konfiguriert? (https://docs.evcc.io/docs/devices/chargers#warp-charger-pro bzw.https://docs.evcc.io/docs/devices/chargers#warp3-charger-pro )
Wenn du noch die alte Variante (also als WARP) hast, kannst du entweder auf WARP3 umstellen, oder du trägst von Hand den Wert von "topic" nochmal bei "energymanager" ein. Mehr macht das WARP3-Template auch nicht und die Phasenumschaltungs-API ist absichtlich die selbe zwischen WARP2 + WARP Energy Manager und WARP3.
-
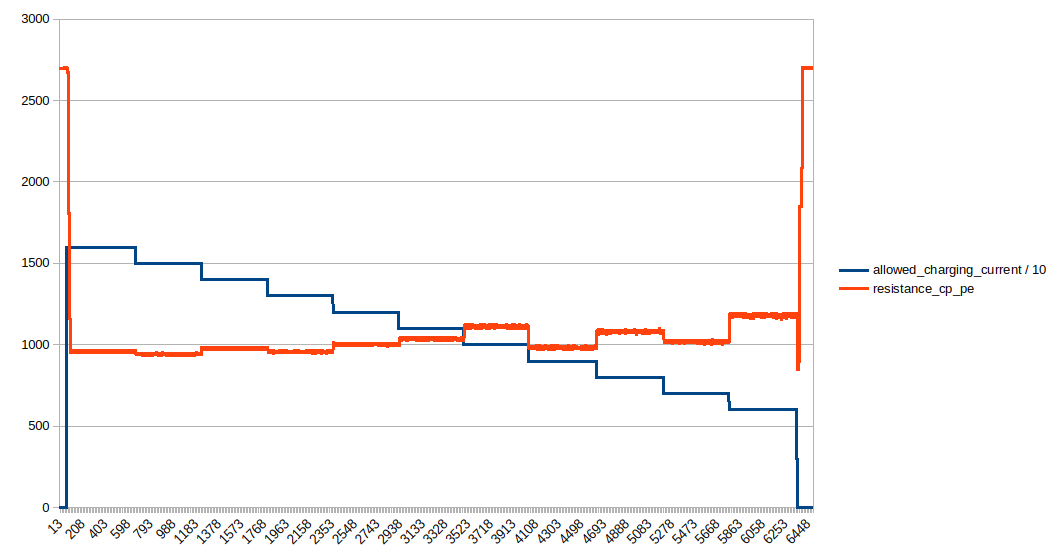
Laut Log hat der ID.4 das Problem jetzt nicht mehr. Der gemessene CP-Widerstand steigt zwar etwas, das ist aber noch okay. (Der Schwellwert zwischen C und B liegt bei 1790). Den erlaubten Ladestrom habe ich durch 10 geteilt, damit man im Diagramm was sieht.

Hast du das schnelle Schützschalten nur wenn du <= 7 A erlaubst und dann den ID.4 ansteckst? Dann könnte es sein, dass der ID.3-Modus nicht mehr richtig funktioniert. Hast du mit deinem Boost ungefähr hier etwas geändert:
bzw.
?
Zieh am besten noch ein Ladeprotokoll von der Situation mit dem Schütz-Tick-Tock. Vielleicht sehen wir da mehr.
-
Eventuell benutzt EVCC den korrekten Energiewert, aber auf dem WARP Charger siehst du noch den Import+Export-Wert. Wir hatten das kürzlich geändert, weil sich herausstellte, dass man je nach Situation (z.B. 1- vs 3-phasiges Laden) einen minimalen Export (~0,1%) misst. Details stehen in diesem Blogpost ganz unten:https://www.tinkerforge.com/de/blog/new-features-in-warp2-221-and-wem-202/
-
1
-
-
Das Problem ist, dass die LAN-Verbindung abggerissen ist. Danach versucht die Wallbox weiterhin Lastmanagement-Pakete zu verschicken, da die aber nicht übertragen werden können, stauen sie sich auf der Wallbox auf. Irgendwann ist der Sendebuffer voll und dann entstehen die "Failed to send state: Not enough space (12)"-Meldungen. Das ist nicht kritisch, aber etwas unschön, dass das Ereignis-Log damit zugemüllt wird. Eventuell können wir das etwas sauberer behandeln.
Der Ladevorgang wurde nach 30 Sekunden unterbrochen, da die Wallbox den Lastmanager nicht mehr erreichen konnte. Damit in dieser Situation keine Überlast erzeugt wird, versucht ein Lastmanager alle Wallboxen zu stoppen, wenn die Verbindung zu mindestens einer unterbrochen ist _und_ alle Wallboxen stoppen den Ladevorgang von sich aus, wenn 30 Sekunden lang keine Daten vom Lastmanager empfangen wurden.
-
1
-
-
Für die Nachwelt: Hat sich geklärt: https://github.com/evcc-io/evcc/issues/13590
On 4/26/2024 at 11:26 PM, StevieC said:ioBroker MQTT Broker
war das Problem.
-
On 4/27/2024 at 12:53 PM, poohnet said:
Kann es sein, dass die Kalibrierung hier evtl. noch etwas angepasst werden muss? Mit den Standardwerten lädt der ID.4 mit 6-7A nämlich überhaupt nicht.
Das ist gut möglich. Starte mal ein Ladeprotokoll und gehe dann von 16A bis 6A alle 10-15 Sekunden ein Ampere runter. (Am besten ohne deinen dynamischen Boost-Modus ;) ) Ich würde erwarten, dass du dann im Protokoll beim gemessenen CP-Widerstand siehst, dass er nach steigt, wenn der erlaubte Strom sinkt.
Wenn du das für ID.4 und Zoe machst, können wir nochmal nachkalibrieren.
-
 1
1
-
-
Das muss ich mir nochmal in Ruhe ansehen, komme aber gerade nicht dazu. Ich melde mich nächste Woche nochmal.
-
Noch eine Ergänzung dazu: Wenn die Wallbox das erste Mal einen Zähler sieht, aktiviert sie die Zählerüberwachung. Danach sind Ladevorgänge nur noch möglich, wenn der Zähler ausgelesen werden kann. D.h. wenn jemand den Zähler ausbaut ö.Ä. blockiert die Wallbox das Laden. Die Zählerüberwachung kannst du im Webinterface deaktivieren, falls du deine WARP3 Pro auf eine Smart downgraden willst, oder der Zähler wirklich kaputt ist.
-
Stimmt, das war noch privat. Sollte jetzt sichtbar sein.
-
On 4/17/2024 at 11:25 PM, ecthelion said:
Wie muss evcc hier denn konfiguriert werden, damit die automatische Phasenumschaltung funktioniert?
On 4/18/2024 at 1:41 AM, MatzeTF said:Bei den EVCC-Einstellungen musst du den Eintrag für den Energy Manager hinzufügen und dafür das gleiche Topic eintragen wie für die Wallbox, da sie das Feature integriert hat.
Ab dem nächsten EVCC-Release musst du das Energy Manager Topic nicht mehr eintragen, WARP3 wird dann separat unterstützt:
https://github.com/evcc-io/evcc/commit/dcb1f5c313d6ff3db8c78e4d309842ef5dc3aeb6
-
On 4/17/2024 at 1:31 PM, poohnet said:
Dass ihr WARP nur gemäß Spezifikation ausliefern könnt, ist absolut verständlich, aber welche Gefahr würde denn bestehen, wenn ich tatsächlich 17A vorgebe?
Das ist weniger eine Begründung, warum du das nicht tun solltest und mehr eine Erklärung, warum man das Offset des Boost-Modus nicht konfigurieren kann.
Wenn ich einen Worst-Case konstruieren sollte, wäre das vermutlich, dass du für einen Zoe R135 kompensierst (sagen wir mal + 1,5A), und dann ein Model 3 (falls es das mit 22kW-Lader gibt, das habe ich gerade nicht im Kopf) anschließt: Das Model 3 zieht gerne mal 0,5A mehr, als du vorgibst, d.h. du könntest 2A über der Vorgabe liegen.
Wenn dein LSS funktioniert und nicht rausfliegt, sollte (Achtung! Bin nur Software-Entwickler, kein Elektriker) nichts passieren, aber wenn dein Haus abbrennt oder deine Milch sauer wird, ö.Ä. bist du schuld :D
-
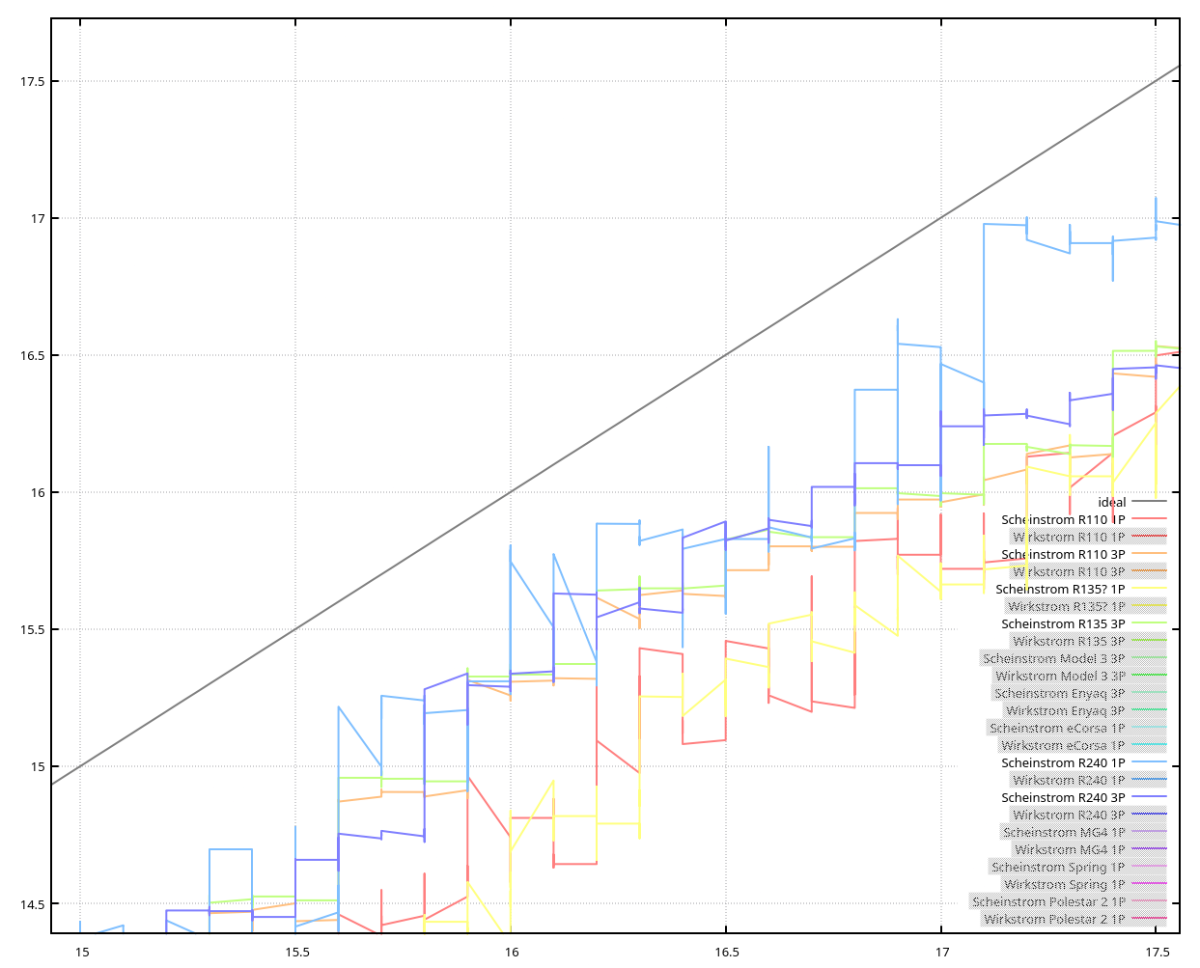
Je nachdem welche Art Zoe das ist musst du möglicherweise sehr stark korrigieren:
Das ist der Ideale Ladestrom vs. was die Autos wirklich ziehen (die Daten rauschen etwas :D ). Wenn du selbst drin rumzoomen willst: https://github.com/Tinkerforge/warp-charger/blob/master/tools/current_ramp/allowed_vs_effective_3.gp
D.h. wenn du z.b. einen R135 (gelb einphasig, orange dreiphasig) auf 16A zwingen willst, müsstest du ~ 17,25A vorgeben. Das ist aber wenn du ein anderes Auto anschließt viel zu viel.
Der Boost-Modus so wie wir ihn implementiert haben ist genau so viel mehr, wie die Spezifikation das erlaubt.
-
1
-
-
Sorry, the WARP3 firmware release took a bit longer than expected.
Please test the attached brickd package (you can install it with
sudo dpkg -i brickd_2.4.5+snapshot~e70c9c6_arm64.deb
)
I've rewritten the HAT specific code to use the GPIO's names (those will hopefully never change!) instead of their numbers.
Edit: Attachment deleted. Brick Daemon 2.4.6 has been released. Please install the official release instead.
Will there be a software update for Hat brick for Raspberry Pi 5 ?
in General Discussion
Geschrieben
EBUSY could mean that the HAT Bricks device tree overlay did not load correctly (We use the overlay to be able to use gpiochip4 7)
Please run gpioinfo and post the output here.