rtrbt
Administrators
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von rtrbt
-
Was für ein Auto versuchst du denn zu laden? Edit: Sorry, wer lesen kann, ist klar im Vorteil. Dann würde ich das auch auf den VW-Notelademodus schieben.
-
Siehst du unter Wallbox->Ladestatus auch als "Erlaubter Ladestrom" z.B. 16 A? Und werden dir dort bei "Schützprüfung" beide Schütze als geschlossen angezeigt? (wenn du ganz auf Nummer sicher gehen willst: Was ist im Low-Level-Zustand auf der selben Seite das CP-PWM-Tastverhältnis? Bei 16 A sollten das 26,7 % sein) Wenn das alles passt, dann möchte dein Auto nicht mehr Strom beziehen. Prinzipiell ist es so, dass die Wallbox nur ein oberes Limit vorgibt und das Auto sich entscheiden kann weniger Strom zu ziehen. Eventuell hast du ein Ladelimit im Auto konfiguriert? Alternativ gibt es Autos, die, wenn der Stecker nicht richtig steckt bzw. nicht verriegelt werden kann, in eine Art Notlademodus wechseln. Dann würde ich aber erwarten, dass 4,1 kW bezogen werden.
-
Wir prüfen gerade, ob man das Problem direkt im Ladecontroller lösen kann.
-
OCPP 2.0 ist derzeit nicht geplant und macht ohne eine gleichzeitige ISO15118-Implementierung bzw. V2G auch wenig Sinn. (ISO15118 kann über OCPP 2.0 getunnelt werden) Hast du einen konkreten Use-Case dafür? Ich wüsste im Moment nicht, dass es OCPP-Backend-Server gibt, die 2.0, aber nicht 1.6 sprechen. Das wäre aber eine interessante Information, wenn du da mehr weißt.
-
Firmware: WARP1 2.6.1, WARP2 2.6.1, WARP3 2.6.1 Unterstützung für weitere Modbus-TCP-Geräte hinzugefügt: GoodWe Hybrid-Wechselrichter Registrierung des Fernzugriffs mit Safari repariert Benutzerinterface der Registierung des Fernzugriffs verbessert Benutzerinterface der Stromzähler-Unterseite verbessert Sichergestellt, dass Stromzählergraph nur angezeigt wird, wenn Zähler verbunden ist (Nur WARP3) Repariert, dass WARP Energy Manager einen WARP3 Charger zu einphasigem Laden gezwungen hat Repariert, dass Lastmanagement ein Fahrzeug nicht als voll erkannt hat, wenn der Ladevorgang sofort (durch einen A->C-Übergang) gestartet wurde (Durch Update auf Ladecontroller-Firmware 2.1.12 (WARP1) bzw. 2.2.6 (WARP2, WARP3)) Download: WARP1 2.6.1 bzw. WARP2 2.6.1 bzw. WARP3 2.6.1
-
Die Pin-Belegung kannst du im Schematic des Ladecontrollers nachsehen: https://github.com/Tinkerforge/evse-v3-bricklet/blob/main/hardware/evse-v3-schematic.pdf Von Pin 1 (links) an: 5V LED Rot LED Grün LED Blau Switch Ground Der Taster ist ein Öffner, d.h. wenn du Pin 5 und 6 verbindest, dann betrachtet der Ladecontroller den Knopf als nicht gedrückt, wenn du die Pins nicht verbindest, dann ist der Knopf gedrückt.
-
https://github.com/Tinkerforge/esp32-firmware/issues/36 steht auf der Liste, aber wie du siehst schon länger :D
-
Schon. Führt dann aber unter anderem dazu dass 1. die API an der Stelle auseinanderläuft zwischen den Wallbox-Varianten (das wäre hässlich aber notfalls verschmerzbar) und 2. dann wieder andere Leute hier im Forum sich beklagen, dass wir unnötig viel Traffic per MQTT rausschicken. API-Design ist schwierig (und bei der Wallbox definitiv nicht optimal, aber brechende Änderungen nach Jahren tun weh) und wir balancieren oft mehr Anforderungen, als man auf den ersten Blick sieht. Wir haben u.A. vor irgendwann in der Zukunft eine vereinfachte API zu entwickeln, als Alternative zum Vollausbau, der im Moment existiert (und teilweise auf die Anforderungen des Webinterfaces zugeschnitten ist). Eventuell können wir da auch eine einfacher zu benutzende Variante des Meldens von Zählerdaten einbauen. Um dein konkretes Problem zu lösen: Es gibt z.B. das final-Plugin für telegraph: https://docs.influxdata.com/telegraf/v1/plugins/#aggregator-final mit dem du anscheinend zwei Datenquellen zusammenlegen kannst. Dann hast du IDs und Messwerte auf einem "Topic" (oder wie das in Influx-sprech auch immer heißt) und das Plugin sollte für dich auch das Reihenfolgenproblem lösen. (Disclaimer: Ich bin kein Influx-Experte, aber es klingt als könnte das irgendwie funktionieren) Edit: Alternativ gibt es noch das merge-Plugin: https://github.com/influxdata/telegraf/blob/release-1.31/plugins/aggregators/merge/README.md damit hatte jemand, der deinen Use-Case hatte aber Probleme: https://community.influxdata.com/t/why-are-my-fields-from-mqtt-topics-not-merged/32929 und wurde auf das final-Plugin verwiesen.
-
Es gibt ocpp/state und darin das Feld "connected". ocpp/state ist im Moment aber absichtlich undokumentiert, weil wir uns noch die Möglichkeit offenhalten wollen, die API zu ändern.
-
Fairerweise: Ich bekome es gerade nicht hin (ohne das Vorwissen einzusetzen, dass ich die API kenne), die Suche der API-Dokumentation davon zu überzeugen, mich zu evse/indicator_led zu führen. Mal sehen ob wir die Suche etwas tunen konnen. Edit: Ja, da ist irgendetwas mit der Suche kaputt. Ich kann nach beliebigen APIs suchen (z.B. nfc/config oder auch energy_manager/sdcard_state) aber nicht nach evse/ APIs. Die tauchen nicht auf.
-
(Achtung Totschlagargument! :D ) Das hat technische Gründe. Konkret: Der Mikrocontroller, den wir benutzen, hat nur begrenzt RAM. Deshalb müssen wir die Maximallänge von APIs beschränken, gerade von APIs die sich oft ändern, weil dann viele MQTT-Pakete generiert werden, die sich bei eventuell langsamen WLAN durchaus mal aufstauen können. Die IDs (die sich nur maximal einmal ändern sollten) und die Werte (die sich sekündlich ändern können) zu koppeln würde dazu führen, dass deutlich größere MQTT-Pakete generiert werden. Das wird auf einer WARP1 (die weniger RAM als eine WARP2 oder 3 hat) dann eng.
-
Das Lastmanagement ist in der frisch veröffentlichten Firmware 2.6.0 enthalten. Danke fürs testen!
-
Firmware: WARP 2.6.0, WARP2 2.6.0 und WARP3 2.6.0 Lastmanagement überarbeitet: Phasen werden unabhängig gesteuert Dynamisches Lastmanagement hinzugefügt Unterstützung von PV-Überschussladen mit mehr als einer Wallbox hinzugefügt Download: WARP 2.6.0 bzw. WARP2 2.6.0 bzw. WARP3 2.6.0
-
@pene8@dinkel1975 Testet bitte beide mal die Firmware im Anhang. Problem Nummer 2 sollte damit behoben sein. Das ist jetzt eine Firmware mit dem Stand von 2.5.0 + Lastmanagement-Beta, d.h. mit Fernzugriff usw., falls ihr damit spielen wollt. Edit: Veraltete Firmware entfernt.
-
Leider noch nicht. Es gibt ein offenes Issue dazu, damit wir das Problem nicht vergessen. https://github.com/Tinkerforge/esp32-firmware/issues/262 Erledigt, danke für den Hinweis :) https://github.com/Tinkerforge/esp32-firmware/commit/7478a93af5469069ae14c3d1070b3e304afc4d38
-
Du musst dir zwei Keypaare generieren (wie z.b. hier beschreiben: https://wiki.archlinux.org/title/WireGuard#Key_generation) und dann die entsprechenden Schlüssel verteilen. Wenn du zum Beispiel mit wg genkey | (umask 0077 && tee warp.key) | wg pubkey > warp.pub wg genkey | (umask 0077 && tee peer.key) | wg pubkey > peer.pub die Keys erstellst, dann musst du auf der Wallbox warp.key als eigenen privaten Schlüssel und als öffentlichen Schlüssel der Gegenstelle. Bei deiner Gegenstelle musst du dann peer.key als dessen privaten Schlüssel konfigurieren und warp.pub als öffentlichen Schlüssel (der Gegenstelle der Gegenstelle, also der Wallbox)
-
Firmware: WARP 2.5.0 neuveröffentlicht Das Fernzugriffs-Modul des Webinterfaces fehlte in der gestern veröffentlichten Firmware. Download: WARP 2.5.0
-
Firmware: WARP 2.5.0 Firmware-Update-Prüfung und -Download hinzugefügt Fernzugriff hinzugefügt Download: WARP 2.5.0
-
Firmware: WARP Energy Manager 2.2.0 Firmware-Update-Prüfung und -Download hinzugefügt Fernzugriff hinzugefügt Firmware-Updates signiert Fokusverlust bei Bearbeitung des Anzeigenamens repariert Übersetzung der Namen von heruntergeladenen Dateien repariert Sichergestellt, dass lange SSIDs nicht das Webinterface-Layout brechen Fehlermeldung hinzugefügt, falls Recovery-Seite das Zurücksetzen auf Werkszustand nicht starten kann MQTT-Automatisierungsregeln mit Präfix repariert Fehlenden Leistungsgraphen bei Victron Energy GX-Stromzählern behoben Download: WARP Energy Manager 2.2.0
-
Firmware: WARP 2.4.2, WARP2 2.5.0 und WARP3 2.5.0 (Nur WARP2/WARP3) Firmware-Update-Prüfung und -Download hinzugefügt (Nur WARP2/WARP3) Fernzugriff hinzugefügt Konfigurierbare Totzeit nach Erkennen eines NFC-Tags zum Ladestart hinzugefügt Blinken der LED bei Neustart der Wallbox hinzugefügt Firmware-Updates signiert (Nur WARP2/WARP3) Kompatiblilität der OCPP-Autorisierung verbessert Repariert, dass Wallboxen vom Lastmanager mehr als 32 Ampere zugeteilt wurden Generierung von leeren Ladelog-PDFs repariert Fokusverlust bei Bearbeitung des Anzeigenamens repariert Übersetzung der Namen von heruntergeladenen Dateien repariert Sichergestellt, dass lange SSIDs nicht das Webinterface-Layout brechen Fehlermeldung hinzugefügt, falls Recovery-Seite das Zurücksetzen auf Werkszustand nicht starten kann MQTT-Automatisierungsregeln mit Präfix repariert (Nur WARP1) Fehlenden Leistungsgraphen bei Victron Energy GX-Stromzählern behoben Download: WARP 2.4.2 bzw. WARP2 2.5.0 bzw. WARP3 2.5.0
-
Fairerweise: Die API ist nicht dokumentiert, weil ich mir offen halten will, sie nochmal zu ändern.
-
Wenn der charger_state == 3 ist solltest du eventuell noch auf evse/low_level_state["time_since_state_change"] nachsehen, dass nicht jetzt gerade angefangen wurde zu laden. Das sind Millisekunden, also kannst du z.B. auf > 40000 prüfen, um dem Auto 40 Sekunden zu geben, mit dem Ladevorgang anzufangen. 40 Sekunden ist ein sinnvoller Wert, weil die Wallbox nach 30 Sekunden einmal versucht das Auto per CP-Trennung zu wecken. Es ist robuster, wenn du nicht genau während der CP-Trennung stop + start aufrufst, sonst sieht das Auto das nicht.
-
Die Ladeleistung kannst du auf zwei Arten abfragen: 1. Über die alte Meter-API https://docs.warp-charger.com/docs/mqtt_http/api_reference/meter#meter_values_warp3 z.B. mit curl -s http://$HOST/meter/values | jq .power 2. Über die neue Meters-API (die ist komplizierter, aber flexibler) https://docs.warp-charger.com/docs/mqtt_http/api_reference/meters#meters_X_values_warp3 z.B. mit curl -s http://$HOST/meters/0/values | jq '.[24]' Dass du auf Index 24 zugreifen musst, kannst du wie folgt herausfinden: https://docs.warp-charger.com/docs/mqtt_http/api_reference/meters#meters_X_value_ids_warp3 gibt dir die IDs der Messwerte des gewünschten Zählers (Zähler 0 ist der in der Wallbox verbaute), die Liste der IDs und deren Bedeutung findest du hier: https://github.com/Tinkerforge/esp32-firmware/blob/master/software/src/modules/meters/meter_value_id.csv und auf der Liste suchst du Power Active LSum ImExDiff (Die Active Power, also Wirkleistung, summiert über alle drei Phasen, Import (also Bezug des Autos) - Export (theoretisch mögliche Einspeisung des Autos)) Edit: Da warst du schneller :D
-
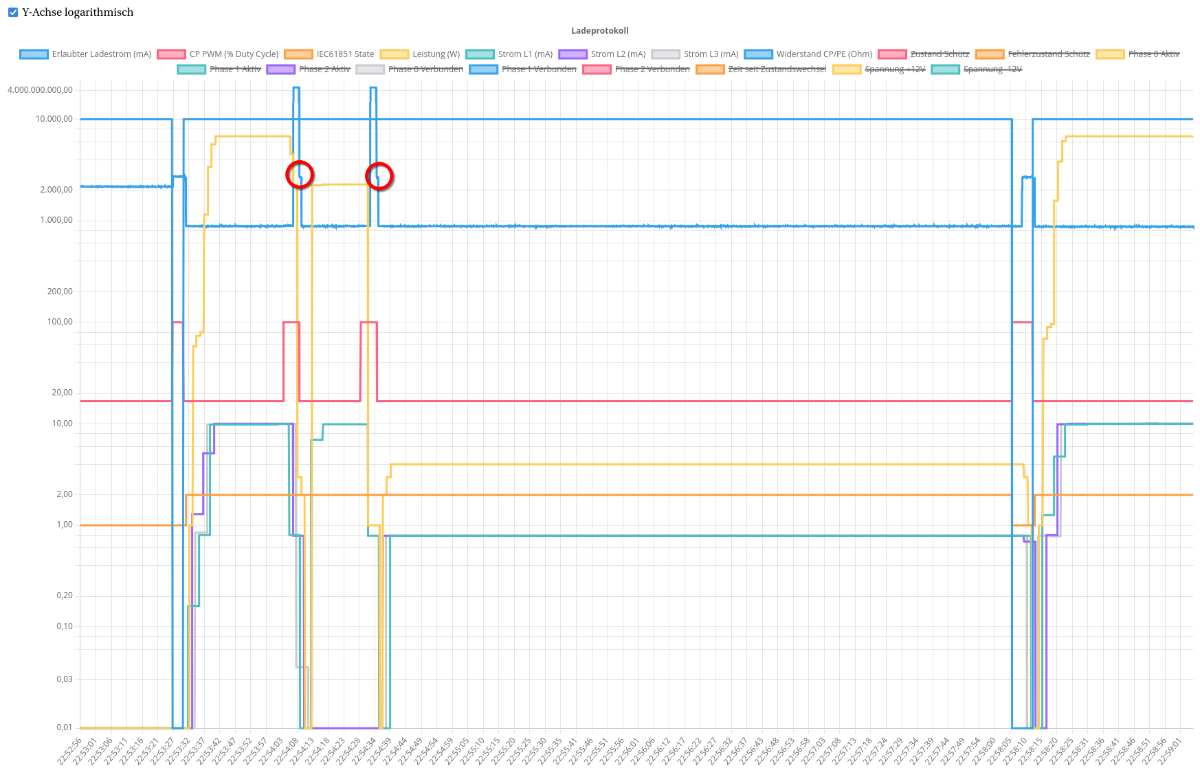
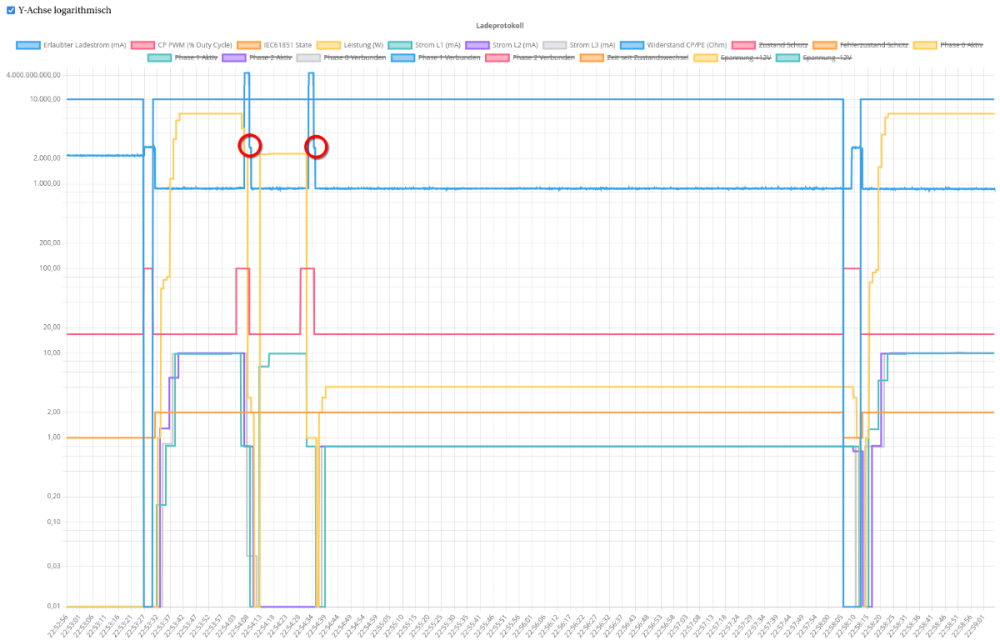
Damit ich das Protokoll richtig lese (Siehe Zahlen im Graph) Du hast das Protokoll gestartet, als du gerade in dem Zustand warst, dass das Auto nicht laden wollte, hast dann Stop+Start gedrückt dann hat es dreiphasig angefangen zu laden. Dann hast du auf einphasig umgeschaltet, das Auto lädt wieder. Dann hast du auf dreiphasig umgeschaltet und das Auto lädt nicht mehr. Dann hast du ~ 4 Minuten später Stop+Start gedrückt Das Auto sieht die Phasenumschaltung und fordert dann wieder Strom an (das sind die beiden rot eingekreisten Stufen bei 4 und 6 auf dem CP-Widerstands-Messwert). Bei einer Phasenumschaltung geht der CP-Widerstand auf "unendlich" also ~ 4 Milliarden Ohm, weil die Wallbox die CP-Leitung trennt, dann die Phasen umschaltet und dann die CP-Leitung wieder verbindet. Dann sehen wir kurz 2700 Ohm (das bedeutet, dass ein Auto angeschlossen ist, aber nicht lädt) und kurz danach 880 Ohm (das bedeutet, dass das Auto Strom anfordert). Das Schütz wird dann wieder durchgeschaltet, das Auto zieht dann aber keinen Strom, obwohl es könnte. Zwei Fragen dazu: 1. Hast du bei 6. auf dreiphasig umgeschaltet? Das Timing ist extrem interessant, weil diese Umschaltung genau 30 Sekunden nach der 3->1phasig-Umschaltung passiert. Wir haben einen anderen Prozess, der 30 Sekunden nach der Ladefreigabe CP trennt, aber nur, wenn das Auto nicht die 880 Ohm anlegen würde. Das sollte bei dir nicht passieren. 2. Wenn du die Wallbox auf einphasig stellst, dann das Auto ansteckst, es > 5 Minuten laden lässt und erst dann auf dreiphasig umschaltest, funktioniert das ohne dass du Stop+Start drücken musst? Edit: Wenn du den Graph im Original sehen willst, kannst du das Debug-Protokoll auf https://vislog.warp-charger.com/ hochladen. Das ist aber noch etwas experimentell.
-
Unter Wallbox -> Ladestatus kannst du ein Ladeprotokoll erstellen. Drücke da mal auf Start (ab dann musst du den Tab auflassen, kannst aber zurück auf die Statusseite gehen) und mach dann die einphasig -> dreiphasig-Umschaltung. Dann warte 2 Minuten und drück Stop + Download. Das Log kannst du hier anhängen, eventuell sehen wir dann noch etwas. Prinzipiell sieht das aber nicht gut aus. Wenn die Wallbox auf Ladebereit steht, dann muss das Auto Strom anfordern, sonst passiert nichts.