



borg
Administrators
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von borg
-
Sind die Firmwares alle aktuell? Master Brick, Thermal Imaging Bricklet und WIFI Extension? Hast du die WIFI Extension V2 oder V1?
-
Das funktioniert, aber du schaffst damit nicht die vollen 8.6Hz leider.
-
Ich kenne die UID von deinem LED Strip Bricklet 2.0 nicht, dementsprechend musst du das selber anpassen. Einmal oben wo steht: UID = "XYZ" # Change XYZ to the UID of your LED Strip Bricklet 2.0 Die UID durch die UID deines Bricklets ersetzen.
-
Den Code vom Brick Viewer zum Thermal Imaging Bricklet kannst du hier finden: https://github.com/Tinkerforge/brickv/blob/master/src/brickv/plugin_system/plugins/thermal_imaging/thermal_imaging.py Nutzt auch Python. Ohne das ich mir das jetzt genauer angesehen hätte, im Brick Viewer nutzen wir self.image.scaledToWidth(self.width*self.image_pixel_width, Qt.SmoothTransformation) Was wahrscheinlich das Bild weniger pixelig aussehen lässt?
-
Hab das gerade getestet, ich kann keine Probleme feststellen. Ich hab einfach einen RED Brick + Master Brick + GPS Bricklet 2.0 genommen und den RED Brick per USB am PC angeschlossen. Das GPS Bricklet 2.0 findet Satelliten und auch die Position etc. Welche Länge hat das Kabel zwischen GPS und Master/RED? Wäre es möglich das Bricklet etwas vom RED Brick/Master Brick entfernt zu legen zum testen um irgendwelche Störungen auszuschließen?
-
Die LED Strip V2 Python Beispiele sind jetzt auch komplett!
-
Wo machst du das Thread.Sleep denn? Im Main Thread sollte das kein Problem Sein. Wenn du dein Sleep in einem Callback aufrufst werden in der Zeit in der Tat keine weiteren Callbacks mehr aufgerufen. Es gibt nur einen Thread für Callbacks in den Bindings.
-
It looks like your Python Bindings are too old?
-
Die Reihenfolge ist nicht fest. Bei einem Stapel hängt das davon ab welchen Brick der Master des Stapels als letztes angesprochen hat, da dieser die Teilnehmer immer "Round-Robin" abfragt.
-
Eigentlich sollte das keinen Unterschied machen. Findet er auch keine Satelliten wenn du das Bricklet einfach für eine längere Zeit liegen lässt? Zeigt der Brick Viewer timeouts an?
-
Grundsätzlich kann sich die WIFI Extension (1 oder 2) nach einem neustart nicht selbst wieder mit dem Programm verbinden. Der Verbindungsaufbau findet immer durch die IPConnection auf PC-Seite statt. Wenn die Verbindung zur WIFI Extension abbricht, sorgt das auto-reconnect Feature der IPConnection dafür das die Verbindung wieder hergestellt wird. Dadurch wird dann auch ein neuer CALLBACK_CONNECTED erzeugt. Das funktioniert mit beiden Extensions, hab ich getestet. Das Problem hier ist die Erkennung des Abbruchs der TCP/IP Verbindung. Wann eine TCP/IP Verbindung als abgebrochen erkannt wird hängt von der Implementierung des TCP/IP Stacks, des Betriebssystems, den Einstellungen im Betriebssystem etc ab. Da haben wir im Zweifelsfall keinen Einfluss drauf. Warum sich das jetzt bei euch zwischen WIFI Extension V1 und V2 unterscheidet weiß ich nicht. Als Workaround könntet ihr folgendes probieren: Oben bei den Imports: Nach dem self.ipconX.connect: Mit dieser Socket Option wird die Verbindung nach 15 Sekunden ohne Datenaustausch geschlossen und das auto-reconnect greift auf jeden Fall. Nur wird die Verbindung damit natürlich auch geschlossen und wieder hergestellt wenn für 15 Sekunden einfach keine Daten übertragen wurden. Am besten wäre es wenn das Tinkerforge Protokoll eine Art Alive-Ping-Pong-Message hätte die zwischen Brick Daemon und Bindings hin und hergeschickt wird. Auf diese Nachricht könnte man dann einen Timeout haben der automatisch das auto-reconnect startet, auch wenn die TCP/IP-Verbindung noch offen ist. Das steht auch schon auf der TODO-Liste, gibt es allerdings im Moment noch nicht im Protokoll.
-
Deine Master Brick Firmware (2.4.1) ist zu alt, die unterstützt noch keine der neuen 7-Pol Bricklets. Bitte einmal aktualisieren .
-
Ich kann das hier leider nicht reproduzieren. Wäre es OK wenn wir dir eines der neuen Industrial Analog Out 2.0 schicken und du es damit testest? Melde dich diesbezüglich bitte per Email an die info@tinkerforge.com mit der Adresse.
-
Ein Brick hat kein Verständnis davon welches Bricklet angeschlossen ist. Aus Sicht des Bricks sind das alles "Blackboxen" für die es Daten hin und her routet. Daher kann der Brick die Daten nicht kombinieren. Auf dem RED Brick kannst du die Daten natürlich kombinieren.
-
Maybe it is problematic if the client mode is configured to an AP that does not exist and the connection always fails? But in mesh mode this is not the case, so i wouldn't expect any problems there.
-
Eine Frage noch: Ist das wirklich der Fall? Weil das bekommt der Master Brick oder das Bricklet gar nicht mit.
-
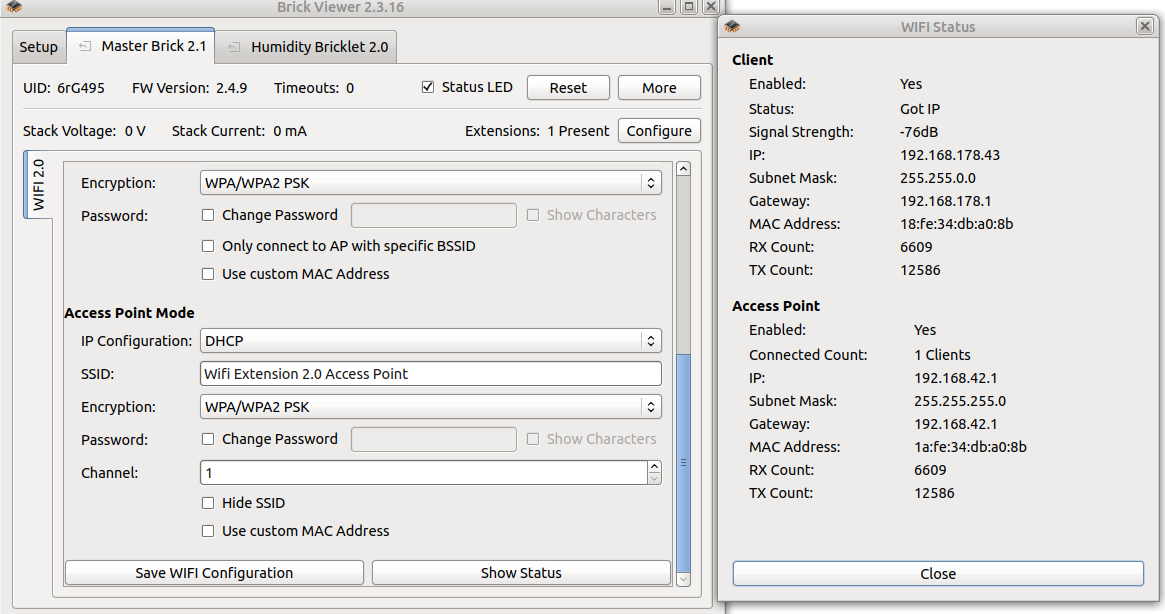
Unfortunately i can't reproduce the problem. Attached you can find the log of the logger and a screenshot of the WIFI Extension configuration that i used. logger_data_1540456173.csv
-
Um das nochmal zusammenzufassen: Wenn das Problem auftritt, ist das Bricklet ansprechbar, die Getter-Funktionen funktionieren, aber es gibt nicht den richtigen Wert aus. Das Problem tritt nur auf wenn das Bricklet an einem Master Brick angeschlossen ist welches auf einem RED Brick steckt. Richtig? Wenn das Problem auftritt kannst du deinen PC per USB mit dem RED Brick verbinden und Einstellungen im Brick Viewer werden auch nicht übernommen? Ich bin da ein wenig ratlos, hab da keine gute technische Erklärung für. Die Firmwares sind alle aktuell? Welche Version hat das RED Brick Image? Zum Testen könnten wir dir auch ein Industrial Analog Out 2.0 schicken um zu sehen ob das einen Unterschied macht.
-
Thank you for the drawing, very nice . I will have to try to reproduce this. I wrote it on my TODO list, will probably be able to do it on Thursday.
-
You need to add a Master Brick.
-
You can use the USB cable to power it, but you can't open the Brick Viewer or run another program on you PC that uses the USB connection. The Brick internally does a routing of the messages (routing to WIFI or USB or into the stack etc). It can't route to two outgoing connections. So if you communicate through USB and through WIFI, this may cause this problem.
-
Bei 1200 baud kannst du Problemlos die Daten Buchstabe für Buchstabe bekommen (auch per USB). Da bin ich zuversichtlich das du die Master-Anfragen vor den Slave-Antworten siehst.
-
Sehr komisch. Das Industrial Analog Out Bricklet weiß ja nicht das es am RED Brick angeschlossen ist, daher kann ich mir nicht erklären warum es da einen Unterschied gibt. Wie wird der Stapel mit Strom versorgt? Der Stapel mit RED Brick braucht ja mehr Strom als ohne, vielleicht sinkt die Spannung gerade so tief dass der DAC auf dem Industrial Analog Out Bricklet damit nicht mehr klar kommt?
-
Deine Frage ist ob die Nachrichten von zwei RS485 Bricklets immer in der gleichen Reihenfolge beim PC/RED Brick ankommen wie sie beim Bricklet eintreffen, richtig? Ich befürchte das muss nicht zwangsweise so sein. Die beiden Bricklets untereinander sind ja in dem Sinne nicht synchronisiert zueinander. Egal ob du einen RED Brick verwendest oder den Stapel am PC anschließt.
-
Yes, the get_illuminance function of the Color Bricklet returns the same unit (lux) as the Ambient Light Bricklet.