




pjscipio
Members
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von pjscipio
-
Hallo markus5766h, vielen Dank schonmal. Und wieviel Ampere sollte das Netzteil liefern? Ist auch das TF-Netzteil geeignet (https://www.tinkerforge.com/de/shop/accessories/24v-4a-ac-dc-power-adapter.html)? Noch eine weitere Frage aus dem Kontext: Hat schonmal jemand Tinkerforge-Steppermotoren mit GRBL (https://github.com/grbl/grbl/wiki) verwendet? Vielen Dank, Philipp
-
Liebe Community, ich möchte drei Schrittmotoren mit drei Stepper-Bricks betreiben (CNC-Fräse). Die Spezifikation der Schrittmotoren sagt: 2.5V, 2.8A/Phase. Dazu habe ich einige Fragen: - Ist es besser/schlechter/egal die drei Bricks in einem Stack zu betreiben im Vergleich zum Aufbau mit 3 Stacks zu je einem Brick? - Wie muss ich das Netzteil bemessen? - Die Bricks liefern nur 2.5A/Phase. Bedeutet das, dass es Probleme gibt oder sind die Motoren damit einfach "ein wenig schwächer"? - Wie finde ich optimale Werte für Be-/Entschleunigung und Geschwindigkeit - Ausprobieren? Kann ich das "überdrehen"? Vielen Dank, Philipp
-
Hallo, welches OS nutzt du denn? Ich hatte Probleme nach dem Update auf OSX El Captain. Ich habe dann dies hier gemacht (zwar für einen Arduino-Anschluss aber in der Vergangenheit gab es da vergleichbare Symptome bei den TF-Bricks): - Reboot and press CMD+R immediately after reboot to enter in Recovery Mode - Open Terminal from Recovery mode - Run the command csrutil enable --without kext - Reboot (siehe auch z.B: http://arduino.stackexchange.com/questions/14018/arduino-not-detected-on-el-capitan-public-beta-6) Achtung: Bei dem Befehl in der 3. Zeile warnt das OS, dass man damit alles kaputt machen könnte. Bei mir nicht der Fall :-) Viele Grüße.
-
Hallo Backdraft, Hast du wie hier (http://www.tinkerforge.com/de/doc/Software/Brickv.html) beschrieben den Brick-Viewer verwendet, um den Master-Brick zu flashen? Danach wird der Brick automatisch wieder in den normalen Modus zurückgesetzt und neu gestartet. Viele Grüße, Philipp
-
Hallo zusammen, @borg: Vielen Dank für den Tip mit den neuen Firmwares. Seit dem Flashen haben wir tatsächlich bisher keine Probleme mehr beobachten können. Wir haben heute bis zu 15.000 Bewegungen (meist kleine Winkel) gemacht. @Nic: Ja, sorry, ich hatte deine Fragen schlampig gelesen. Hier die Info: Wir steuern die beiden Motoren mit je 800 mA an und verwenden eine maximale Geschwindigkeit von 500 Schritte/sec. Viele Grüße, Philipp
-
Hallo Borg, hallo Nic, geflashed habe ich die Bricks, testen können wir allerdings erst am Donnerstag. Dann melde ich auch die Spannungen und Beschleunigungen zurück. Mittlerweile kann ich mir aber gut vorstellen, dass es mit der Temperatur zusammenhängt. Urspünglich hatten wir den Stack unter einer "Papierhaube" und gefühlt ist der Stack dann noch schneller abgestürzt. Vielleicht hilft ja auch eine zusätzliche Kühlung per Lüfter? Ich gebe aber noch genaueres Feedback nach den Tests. Grüße, Philipp
-
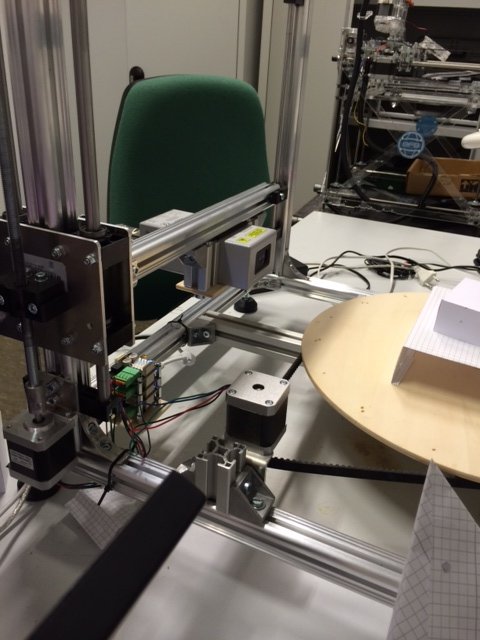
Liebe Community, wir haben hier folgenden Stack: Power - Master - Stepper - Stepper. Zur Stromversorgung haben wir ein Netzteil mit 15V und 6.67A. Im Anhang ein Foto des Aufbaus. Der erste Motor steuert einen Plattenteller (Rotation um die vertikale Achse). Der zweite Motor bewegt einen Sensor auf- und ab auf der vertikalen Achse. Unsere Software ist eine Java-Anwendung und läuft auf einem Windows 8 Rechner. Nun das Problem: Wir bewegen nacheinander beide Motoren, sodass der Sensor im Laufe der Zeit das Objekt auf dem Plattenteller "von alle Seiten sieht". Regelmäßig bricht aber die Verbindung zum Stack (und damit auch zu den Motoren) nach einiger Zeit ab (meist nach < 500 Bewegungen der Motoren). Es tritt folgende Exception auf: com.tinkerforge.TimeoutException: Did not receive response in time for function ID 8 at com.tinkerforge.Device.sendRequest(Device.java:197) at com.tinkerforge.BrickStepper.getCurrentPosition(BrickStepper.java:414) Wir haben auch einmal getestet, die Stepper-Bricks einzeln per USB anzusprechen (jeweils den anderen brachgelegt). Da scheint es zu klappen. Zumindest bei bis zu 500 Bewegungen kam es bisher nicht zum Absturz. Hat jemand einen Idee, was wir machen können? Macht es Sinn, die beiden Stepper-Bricks mit je einem eigenen USB-Kabel anzusprechen und auf den Master-Brick zu verzichten? Vielen Dank, Philipp
-
Hallo Borg, Das mit dem Multimeter hat geklappt. Zusätzlich weiß ich jetzt, wozu das Gerät (stand bisher ungeöffnet im Schrank) gut ist. Vielen Dank, Philipp
-
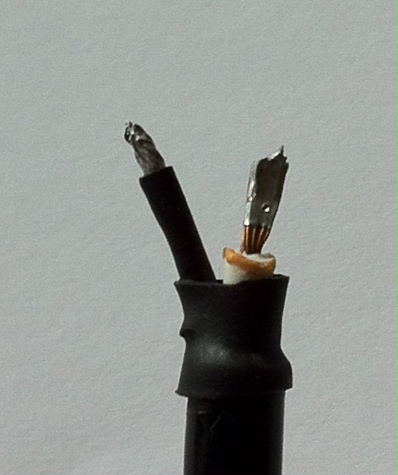
Hallo Borg, vielen Dank für die schnelle Hilfe. Kann ich noch einen Tip bekommen, wie ich "+" und "-" bestimmen kann? Das "Ende" meines Netzteils sieht so aus -> Anhang. Falls das bei der Bestimmung hilft: Es handelt sich um das Netzteil aus dem 3D Drucker-Bausatz Velleman K8200. Vielen Dank, Philipp
-
Liebe Tinkerer, meine Physikkenntnisse reichen einfach nicht aus, daher wende ich mich an euch: Ich habe folgenden Aufbau: StepDown Power Supply -> Master -> Stepper -> Stepper. An jedem Stepper hängt ein Schrittmotor. Ich habe den Eindruck, dass die Netzteile, die ich bisher probiert habe, nicht die nötige Power hatten. Jetzt die Fragen: 1) Ich habe hier ein Netzteil mit dem Ausgang "15V, 6.67A, max 100W". Kann ich das an die StepDown Power Supply anschliessen oder ist es überdimensioniert und zerstört eventuell meine Bricks/Motoren? 2) Bekomme ich eine Problem, wenn ich den Stecker falsch herum anschliesse (und damit + und - vertausche)? Vielen Dank, Philipp
-
Einfach mal ins Blaue: ein Leerzeichen vor weezy zuviel. Änderungen in der Sources-Datei. Viele Grüße, Philipp
-
Na, dann google ich mal nach 1. (und bereite die Haushaltskasse auf 2. vor ...) Danke trotzdem fürs Feedback.
-
Liebe Community, ich habe folgenden Stackaufbau: Step-Down-Power - Master - Stepper - Stepper. Dummerweise habe ich eine externe Stromversorgung an die grüne (statt der schwarzen) Buchse der Power-Supply angeschlossen. Dabei haben scheibar der Master und einer der Stepper den Geist aufgegeben. Sie reagieren nicht, weder wenn man sie einzeln noch mit anderen Komponenten zusammen betreibt. Beim Anschluss per USB meldet das Betriebssystem (MacOS), dass das USB-Gerät zu viel Strom zieht. Seht ihr eine Chance, dass ich die beiden (oder einen) nochmal wiederbelebe? Gibt es etwas, was ich probieren kann? Vielen Dank, Philipp
-
[update2] Setzen des Decay-Modus ändert die Höhe des Tons, den der Motor im "Leerlauf" macht, kann ihn aber nicht verhindern. Habe verschiedene Werte zwischen 0 und 65k getestet. Mit low decay (65k) ist es am erträglichsten. Das ist übrigens mein Motor: http://de.wantmotor.com/ProductsView.asp?id=155&pid=75&sid=80 (Model 42BYGHW811, ganz unten).
-
[update] Mit der von Nic angefügten Skizze und dem Datenblatt des Motors habe ich die Belegung nochmal umgesteckt. Jetzt scheint es tatsächlich zu funktionieren. Einziger Ärger: Solange der Motor aktiv ist (enabled) produziert er einen sehr hohen Fiepton. Ich werde jetzt noch probieren, per API den Decay-Modus auf low zu stellen. Viele Grüße, Philipp
-
Hallo Nic, vielen Dank. Ich habe mutig ein wenig experimentiert. Generell passt es jetzt, denke ich. Ich fürchte aber, dass mein Schrittmotor den Stepperbrick überfordert. Mal bewegt er sich ein wenig, mal nicht. Power hat er kaum (man kann die Achse immer leicht mit der Hand blockieren). Habe auch verschiedene Netzteile ausprobiert. Der Motor braucht 2,5A. Ich habe mir jetzt noch einen neuen Motor mit 1,5A bestellt. Mal sehen, ob ich damit mehr Erfolg habe. Viele Grüße, Philipp
-
Liebe Community, ich konnte leider bisher im Forum noch nichts Genaues dazu finden, daher ein neues Topic: Ich will einen 4-adrigen Schrittmotor mit einem Stepper-Brick betreiben. Leider weiss ich nicht, in welcher Reihenfolge ich die Kabel im Stecker für den Anschluss im Brick einbauen muss. Die Kabel am Motor haben die gleichen Farben wie das Beispiel bei der Beschreibung des Bricks (http://www.tinkerforge.com/de/doc/_images/Bricks/brick_stepper_motor_setup_1200.jpg). Heisst das, dass ich auch die Belegung der Stecker übernehmen kann? Was passiert, wenn ich die Kabel in der falschen Reihenfolge einbaue? Vielen Dank für Ratschläge, Philipp
-
Hallo Photron, auch der Ethernet-Adapter scheint mit der RC-Version zu funktionieren. Aus meiner Sicht also Freigabe :-). Viele Grüße, Philipp
-
Hallo Photron, der Installer funktioniert, die Verbindung zum Stack und das Auslesen von ein paar Bricklet-Werten funktionieren einwandfrei. Ob der Verbindung über den weiter USB-Ethernet-Adapter klappt, kann ich leider erst am Montag testen (und zurückmelden). Viele Grüße, Philipp
-
Hallo Photron, meine Antworten per PM werden unter meinen Messages nicht angezeigt. Falls du noch keine Antwort von mir erhalten hast, einfach nochmal melden. Viele Grüße, Philipp
-
Liebe Community, hat jemand schon einmal einen Laser-basieren Entfernungsmessser gebaut? Es gab das Thema wohl schon 1-2 Mal, leider aber ohne konkrete Rückmeldung. Daher versuche ich es hier nochmal. Die IR-basierten Sensoren sind mir einfach zu ungenau. Vielen Dank, Philipp
-
Ich bin Early Adopter und habe daher schon 10.9. :-) Viele Grüße, Philipp
-
Hallo Photron, beim Ausführen des Installers bekomme ich folgende Fehlermeldung: "INSTALL" ist beschädigt und kann nicht geöffnet werden. Es empfiehlt sich, das Image auszuwerfen." Viele Grüße, Philipp
-
Na, da soll einer drauf kommen . Vielen Dank für die Mühe und die kompetente Hilfe in jedem Fall. Viele Grüße, Philipp
-
Hallo Photron, _v12 ist kompatibel zum USB-Adapter. Wenn ich zu Hause bin, teste ich noch die Funktionalität zusammen mit den Tinkerforge-Bausteinen. Darf ich aus Neugierde fragen, was jetzt im Endeffekt Ursache/Lösung waren? Viele Grüße, Philipp