borg
Administrators
-
Benutzer seit
-
Letzter Besuch
-
Gerade
Viewing Topic: Warp4 und Wem2: PV-Laden startet nicht automatisch bei Tesla
Alle erstellten Inhalte von borg
-
Ich Frage mich ob die nicht vielleicht auch damit einverstanden wären dein Internet zu nutzen für die Anbindung solange du damit einverstanden bist. Dann hätten Sie ja auch nicht die laufenden Kosten der SIM Karte. Ein anderes technisches Detail was mir nicht klar ist: Soweit ich OCPP kenne wird eine Ladung immer über eine Authentifizierung freigegeben, d.h. der Netzbetreiber müsste deine NFC-Karten irgendwie anlernen oder dir NFC-Karten bereit stellen oder sowas. Ob die das wohl bedacht haben?
-
Ein Großteil davon ist schon geplant und es gibt auch auf github schon entsprechende Issues dazu. Die einzige Idee für die es glaube ich noch kein Issue gibt ist "NFC-Freigabe vorm anstecken". Ich könnte mir vorstellen dass das etwas verwirrend werden kann, da wir ja in der Default-Einstellung eine gestartete Ladung mit der NFC-Karte auch wieder abbrechen können. Auf der anderen Seite haben wir jetzt bei WARP3 mehr Farben zur Verfügung um Status-Informationen anzuzeigen.
-
Ich vermute ich war da gestern noch am rumfummeln als du die Seite besucht hast und sie war kurz nicht erreichbar. Die Modbus-Register sollten aber glaube ich passen 🤔.
-
Unter https://docs.warp-charger.com gibt es jetzt eine neue Dokumentationsseite! Dort fehlt noch ein bisschen zusätzlicher Inhalt den wir jetzt Stück für Stück hinzufügen. Allerdings sollte vor allem die MQTT/HTTP API-Referenz jetzt viel besser sein. Ihr könnt dort rechts bei jeder Unterseite zwischen HTTP/MQTT wählen und für welches Produkt ihr die API haben wollt. Es sollte dann auch zu jeder API ein Beispiel geben. Zusätzlich gibt es noch eine Beispielseite wo wir versuchen für die wichtigsten APIs jeweils ein ausführlicheres Beispiel einzufügen. Neu ist auch oben rechts eine Suchfunktion die ich empfehlen kann. Generell soll warp-charger.com auf Dauer eine Landingpage für Neukunden sein die erst noch erkunden was die WARP-Produkte sind und was diese können. Auf der anderen Seite soll docs.warp-charger.com ausführlich mit vielen Beispielen erklären wie man etwas mit dem WARP Charger/WARP Energy Manager umsetzt. Feedback für die neue Doku-Seite gerne in diesem Thread :).
-
Hier hatten wir die Diskussion gerade:
-
Mh, wir haben da leider auch keinen direkten Ansprechpartner bei der KFW. Aber ich schreibe die KFW mal an diesbezüglich. Hast du einen Link zu dem Antrag (damit ich mich darauf beziehen kann) oder kommt man da nur dran wenn man vorher schon etwas eingereicht hat?
-
Ich bin mir nicht sicher was du meinst mit der Frage. Wenn du den Zähler ausbaust und die Wallbox wieder startest taucht sie als WARP3 Smart wieder auf. Dann sind alle Funktionen die nur mit Zähler funktionieren weg. Andersrum kannst du auch eine WARP3 Smart kaufen, einen unterstützen Zähler einbauen, dann erkannt das die Software und du hast einen WARP3 Charger Pro.
-
Kannst du nach der Gerätesuche einmal auf Log klicken und das Log hier hochladen?
-
Aktuell wird der Preis nicht pro Ladevorgang gespeichert, es ist nur ein globaler Parameter. Das Feature ist daher aktuell leider nicht für dynamische Tarife geeignet. Da müsstest du die CSV ziehen und die dynamischen Preise selber zuordnen. Wir planen da allerdings das für dynamische Stromtarife aufzubohren in Zukunft.
-
Das kann ich mir nicht vorstellen. PP wird nicht als Leitung durch ein Typ2-Kabel geführt, da ist nur ein Widerstand im Stecker der angibt was das Kabel an Strom führen kann. Die Wallbox kann das nicht beeinflussen was das Auto da sieht. Soweit ich weiß muss man nur zwischen 3% und 7% Duty Cycle auf das PWM legen um auf ISO 15118 zu wechseln. Auf dieses PWM wird dann hochfrequent etwas moduliert das Autos ohne ISO15118-Support gar nicht bemerken und Autos mit ISO15118-Support hoffentlich interpretieren können. Die Kommunikation per ISO15118 selbst hat eine 568-Seitige Spezifikation 🙃.
-
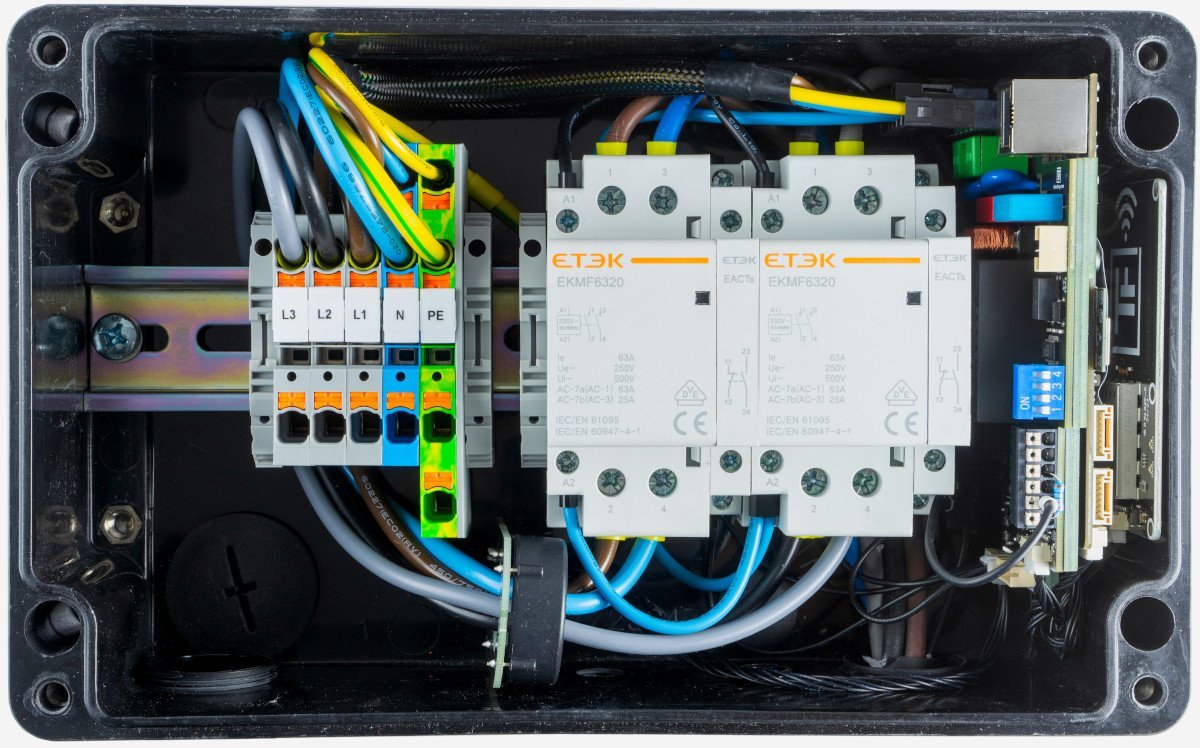
Das ist die CP-Leitung, darüber wird mit dem Auto kommuniziert. Ist auch im Stromlaufplan eingezeichnet: https://www.warp-charger.com/documents/WARP3_Stromlaufplan.pdf. Kommt in den schwarzen Stecker (zweiter Steckplatz von unten) zwischen den Widerstand, siehe hier:
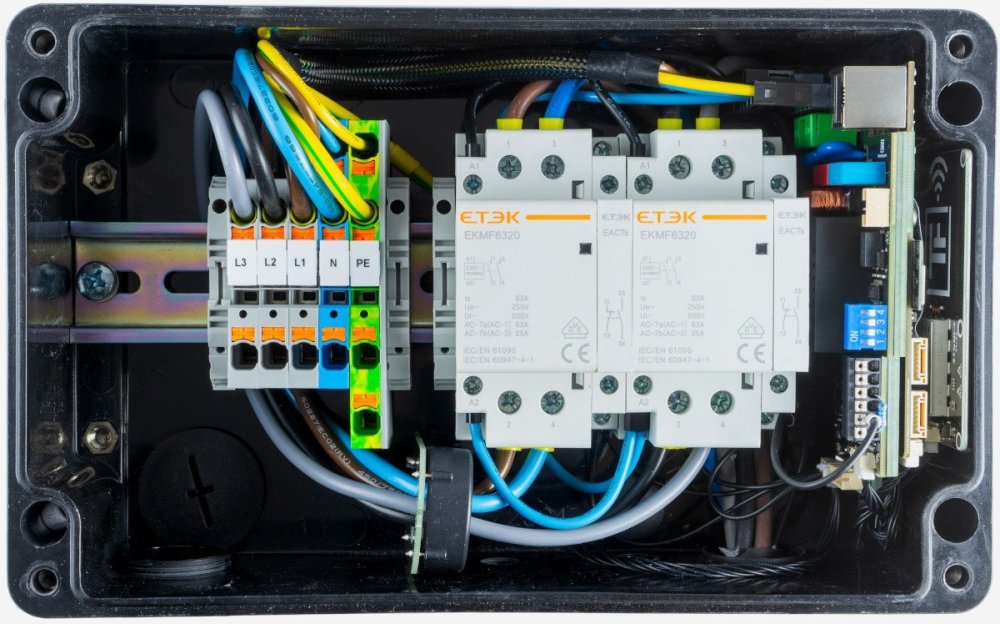
-
Link sollte jetzt gehen, Danke für den Hinweis!
-
Oh, ich wusste nicht dass das privat gesetzt war, ich dachte das war schon immer öffentlich. Sorry!
-
WARP3 ist jetzt in der Liste: Lustigerweise haben sie WARP3 unter "Warp" einsortiert und WARP2 unter "Tinkerforge GmbH"... aber egal. Hauptsache es ist endlich auf der Liste.
-
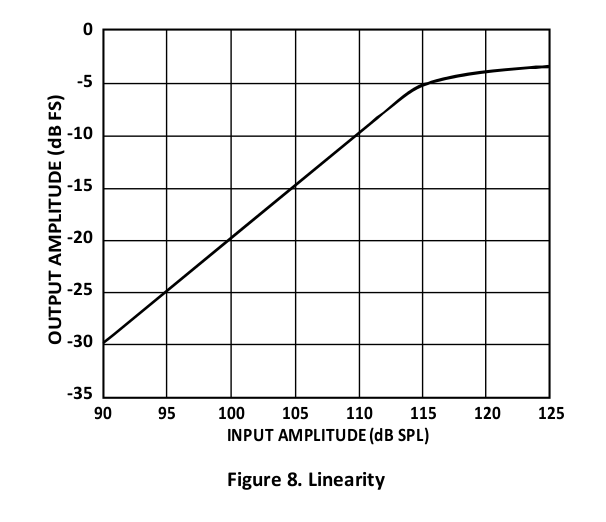
Die Herstellerangaben vom verbauten ICS43432 MEMS-Mikrofon gehen nur bis 125dB. Aber vom Chart her würde ich erwarten das die Ausgabe immer flacher wird und entsprechend irgendwann einfach stehen bleibt. Bei uns im Code gibt es da nichts was sagt "bei 120 dB ist Maximum und wir schneiden ab". Wir werten einfach aus was auch immer analog ankommt.
-
I don't have any reliable data about the max throughput of the Ethernet Extension at hand. My suspicion is that the W5500 chip that we use has problems to handle the 1000 packages per second that are necessary for this, it is better at sending large packages, but our protocol only uses 64 bytes per package. Do you absolutely need the Ethernet Extension in your application or can you use the ESP32 Ethernet Brick?
-
Welche Files suchst du denn? Die neuen Bricklets sind schon seit 6 Monaten auf Github, die haben wir öffentlich entwickelt: https://github.com/Tinkerforge/evse-v3-bricklet/ https://github.com/Tinkerforge/warp-esp32-ethernet-brick Die Firmware für den EVSE V3 ist die gleiche wie die für den EVSE V2, die entscheidet zur Laufzeit für welche Hardware sie ist: https://github.com/Tinkerforge/evse-v2-bricklet/ Die Firmware für die ESPs sind schon immer alle in einem "monorepo" bei uns: https://github.com/Tinkerforge/esp32-firmware/ Das NFC Bricklet ist das alte geblieben: https://github.com/Tinkerforge/nfc-bricklet
-
Das ist kein Problem. WB1 kann weiterhin das Lastmanagement übernehmen und auch die WARP3 steuern. Je nach aktueller Firmware-Version müsst ihr eventuell einmal die Firmware von den Wallboxen auf den neusten Stand bringen.
-
Einfacher wäre es doch vermutlich die HTTP-API zu nehmen dafür, die hat ja die gleichen Funktionen die auch die MQTT-API hat, könnte also genauso behandelt werden von EVCC. Oder? 🤔
-
Das kannst du so machen, da gibt es keine Probleme. Wenn du L und N vertauscht zeigt die Wallbox das an und verweigert das Laden. Das kannst du direkt von außen erkennen, die LED blinkt dann 4x rot im Intervall.
-
Oh das ist meine Schuld, ich hab gestern angefangen die neue Dokumentationsseite die bald kommen wird einzurichten und dabei wohl irgendwas falsch konfiguriert. Hab das gerade erstmal wieder rückgängig gemacht und die Downloads gehen jetzt wieder! Sorry!
-
Also am allgemeinen Aufbau in der Box werden wir nichts mehr ändern (Klemmen, Zähler, Schütze von v.l.n.r. mit EVSE/ESP vertikal daneben). Sprich falls es da nochmal eine Erweiterung mit ISO15118-Support gibt wird die über ein neues EVSE implementiert und der Rest kann bestehen bleiben. Daher wäre ein Umbau von WARP3 auf WARP3+ISO15118 nicht so kompliziert wie von WARP1 auf 2 auf 3. Zu den Kosten kann ich da noch nichts sagen, dafür haben wir das noch nicht gut genug durchgeplant. Man braucht für ISO15118 grob einmal das hier zusätzlich: https://www.codico.com/de/white-beet-ei-1-1-evse-module-with-iso-15118-stack-pwm
-
@Jure Wir lassen den Post mal stehen da er hinreichend On-Topic ist hier im Thread. Haben allerdings den Affiliate-Link entfernt...
-
Hallo Leute, Die neuen WARP3 Charger sind nun im Shop: https://www.tinkerforge.com/de/shop/warp/wallbox.html Einmal die Innenansicht der finalen Version wie sie jetzt ausgeliefert wird. Die Box kommt jetzt mit einem wertigeren Zähler, zwei Schützen für die Phasenumschaltung und neue EVSE/ESP Bricklets vertikal im Huckepack. Es gibt jetzt immer Anschlussklemmen für den Elektriker und der LED Button (hier nicht im Bild) kann jetzt RGB statt nur blau. Es war jetzt vor Ostern doch alles ein bisschen knapp geworden, aber wir hatten vielen Leuten versprochen das man ab heute vorbestellen kann, daher wollten wir es jetzt auch durchziehen. Die Shopeinträge und die neue Homepage sind noch nicht komplett fertig. So fehlen im Shop noch ein paar Fotos und Beschreibungen der Zubehörteile und als größere Änderung auf der Homepage planen wir eine Trennung zwischen der Homepage und der Dokumentation. In Zukunft soll warp-charger.com mehr als "Landingpage" für Neukunden sein mit vielen Anwendungsbeispielen und Erklärungen die weniger technisch sind. Zusätzlich wird eine neue Dokumentationsseite aufgebaut (die ist nicht rechtzeitig fertig geworden leider, aktuell gibt es erstmal noch die alte API-Doku). Dort soll die API und andere technische Merkmale und Konfigurationsmöglichkeiten besser dargestellt werden mit mehr Beispielen etc. Diese Seite ist dann mehr für die Bestandskunden gedacht, die mit ihrer Wallbox irgendwas machen wollen und nachschauen möchten wie das geht. Das wird jetzt Stück für Stück fertig gestellt. Wenn die ersten Wallboxen in den Versand gehen wird das sicher alles schon viel ordentlicher aussehen! An der Stelle einmal der Hinweis das wir beim Erstellen der neuen WARP3 Betriebsanleitung auch die WARP2 Betriebsanleitung nochmal auf den neuesten Stand gebracht haben. Dort sollten jetzt nach aktuellem Stand wieder alle Hardware- und Firmwarefeatures beschrieben sein! Es wird dann wenn alles fertig ist auch noch einen "offiziellen" Blogeintrag geben in dem wir ausführlich beschreiben was mit WARP3 aktuell schon möglich ist und was wir in Zukunft als neue Features planen. Wir haben da noch so einiges vor 😊.
-
Sollte in Kürze drauf sein. War eins der Ziele was wir hatten. Ein Feedback von den Elektrikern war oft das es schwer anzuschließen ist. Da jetzt immer ein Klemmblock drin und mehr Platz vor dem Klemmblock ist weil die Hutschiene höher sitzt sollte es jetzt wirklich einfach anzuschließen sein.