borg
Administrators
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von borg
-
Oh das ist meine Schuld, ich hab gestern angefangen die neue Dokumentationsseite die bald kommen wird einzurichten und dabei wohl irgendwas falsch konfiguriert. Hab das gerade erstmal wieder rückgängig gemacht und die Downloads gehen jetzt wieder! Sorry!
-
Also am allgemeinen Aufbau in der Box werden wir nichts mehr ändern (Klemmen, Zähler, Schütze von v.l.n.r. mit EVSE/ESP vertikal daneben). Sprich falls es da nochmal eine Erweiterung mit ISO15118-Support gibt wird die über ein neues EVSE implementiert und der Rest kann bestehen bleiben. Daher wäre ein Umbau von WARP3 auf WARP3+ISO15118 nicht so kompliziert wie von WARP1 auf 2 auf 3. Zu den Kosten kann ich da noch nichts sagen, dafür haben wir das noch nicht gut genug durchgeplant. Man braucht für ISO15118 grob einmal das hier zusätzlich: https://www.codico.com/de/white-beet-ei-1-1-evse-module-with-iso-15118-stack-pwm
-
@Jure Wir lassen den Post mal stehen da er hinreichend On-Topic ist hier im Thread. Haben allerdings den Affiliate-Link entfernt...
-
Hallo Leute, Die neuen WARP3 Charger sind nun im Shop: https://www.tinkerforge.com/de/shop/warp/wallbox.html Einmal die Innenansicht der finalen Version wie sie jetzt ausgeliefert wird. Die Box kommt jetzt mit einem wertigeren Zähler, zwei Schützen für die Phasenumschaltung und neue EVSE/ESP Bricklets vertikal im Huckepack. Es gibt jetzt immer Anschlussklemmen für den Elektriker und der LED Button (hier nicht im Bild) kann jetzt RGB statt nur blau. Es war jetzt vor Ostern doch alles ein bisschen knapp geworden, aber wir hatten vielen Leuten versprochen das man ab heute vorbestellen kann, daher wollten wir es jetzt auch durchziehen. Die Shopeinträge und die neue Homepage sind noch nicht komplett fertig. So fehlen im Shop noch ein paar Fotos und Beschreibungen der Zubehörteile und als größere Änderung auf der Homepage planen wir eine Trennung zwischen der Homepage und der Dokumentation. In Zukunft soll warp-charger.com mehr als "Landingpage" für Neukunden sein mit vielen Anwendungsbeispielen und Erklärungen die weniger technisch sind. Zusätzlich wird eine neue Dokumentationsseite aufgebaut (die ist nicht rechtzeitig fertig geworden leider, aktuell gibt es erstmal noch die alte API-Doku). Dort soll die API und andere technische Merkmale und Konfigurationsmöglichkeiten besser dargestellt werden mit mehr Beispielen etc. Diese Seite ist dann mehr für die Bestandskunden gedacht, die mit ihrer Wallbox irgendwas machen wollen und nachschauen möchten wie das geht. Das wird jetzt Stück für Stück fertig gestellt. Wenn die ersten Wallboxen in den Versand gehen wird das sicher alles schon viel ordentlicher aussehen! An der Stelle einmal der Hinweis das wir beim Erstellen der neuen WARP3 Betriebsanleitung auch die WARP2 Betriebsanleitung nochmal auf den neuesten Stand gebracht haben. Dort sollten jetzt nach aktuellem Stand wieder alle Hardware- und Firmwarefeatures beschrieben sein! Es wird dann wenn alles fertig ist auch noch einen "offiziellen" Blogeintrag geben in dem wir ausführlich beschreiben was mit WARP3 aktuell schon möglich ist und was wir in Zukunft als neue Features planen. Wir haben da noch so einiges vor 😊.
-
Sollte in Kürze drauf sein. War eins der Ziele was wir hatten. Ein Feedback von den Elektrikern war oft das es schwer anzuschließen ist. Da jetzt immer ein Klemmblock drin und mehr Platz vor dem Klemmblock ist weil die Hutschiene höher sitzt sollte es jetzt wirklich einfach anzuschließen sein.
-
Oh, ja das muss auf true!
-
Probier mal die Kalibrierung im Anhang. calibration.json
-
Wir haben das EVSE V2 aktuell aus dem Shop rausgenommen, da wir nicht mehr so viele auf Lager haben und noch welche zum austauschen haben wollen falls mal ein WARP2 defekt ist. Wir würden natürlich ungern nochmal eine neue Produktion starten. Am besten wartest du einfach noch zwei Wochen, dann gibt es den EVSE V3 und du kannst der erste sein der von WARP1 auf WARP3 umrüstet 🙂.
-
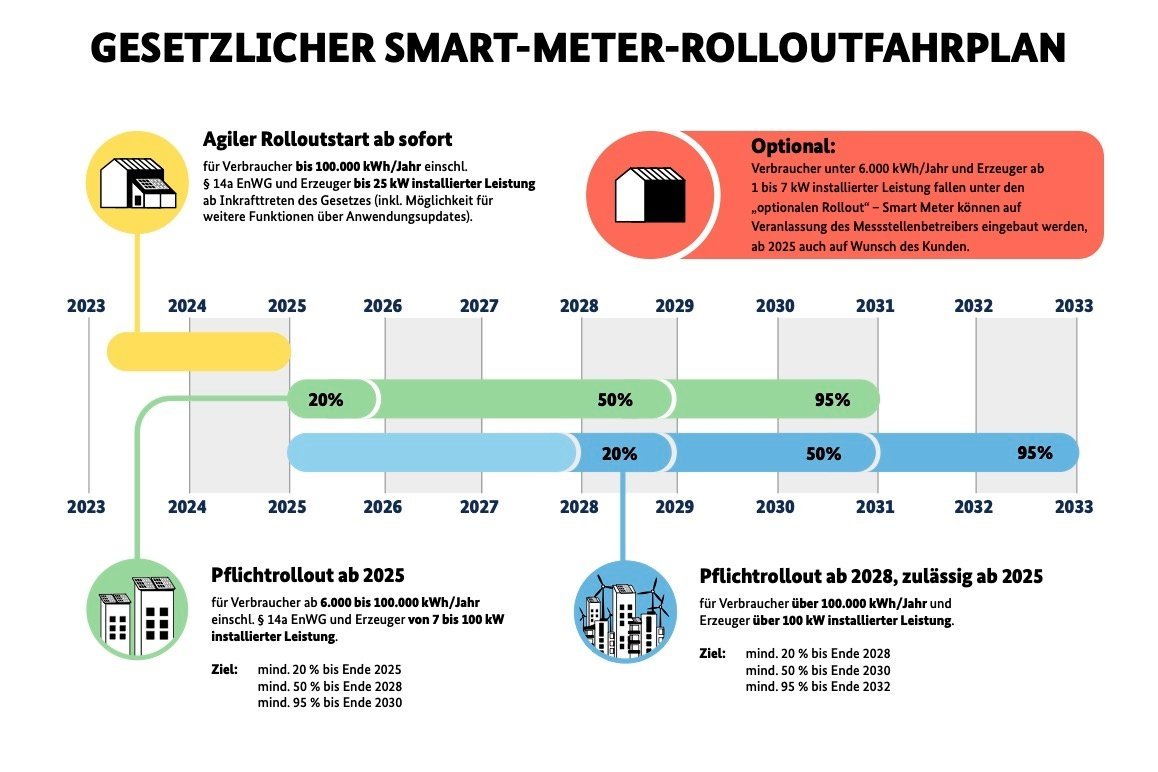
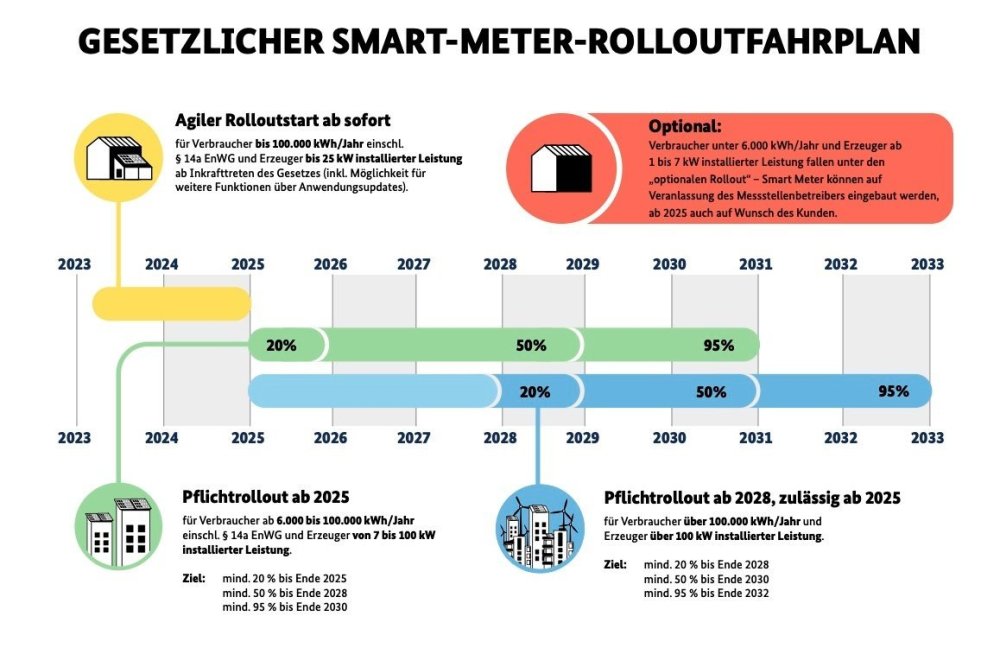
Die allermeisten Netzbetreiber bieten noch gar keine Steuergeräte nach §14a EnWG. Die Netzbetreiber die es aktuell schon tuen haben meistens einen "Rundsteuerempfänger", dafür wird ein potentialfreier Kontakt benutzt und die Wallbox muss auf Grund es Kontaktes die Ladung entweder abbrechen oder auf 4,1kW reduzieren. Die WARP3 (und auch WARP2) hat einen Eingang dafür in der Wallbox. Oft ist es aber umständlich oder nicht möglich einen "Klingeldraht" vom Netzanschluss zur Wallbox zu legen, in dem Fall kann man den WARP Energy Manager beim Netzanschluss installieren, der hat auch einen potentialfreien Eingang. Der Energy Manager kann dann die Wallbox entsprechend steuern. In Zukunft soll es Steuerungsboxen geben die auch digitale Protokolle sprechen. Da ist z.B. Modbus/TCP angedacht (was die WARP Charger auch schon unterstützen). Oft liest man da auch das EEBus verwendet werden könnte. Wirklich festgelegt ist aber noch nichts... Wenn sich dort ein Protokoll durchsetzt was wir noch nicht unterstützen werden wir das natürlich implementieren. Falls dein Netzbetreiber keine Rundsteuerempfänger mit potentialfreier Kontakt anbietet kannst du aktuell nur ein Ethernet-Kabel zur Wallbox legen und drauf warten was sich in Zukunft durchsetzt und das dann nachrüsten. Realistisch wird sich das aber alles noch Jahre hinziehen. Aktuell ist es geplant das es eine Abdeckung mit Steuerungsboxen von 50% bis 2029 gibt...
-
Die Eckdaten bleiben grob identisch bis auf die Verbesserungen die ich oben beschrieben hab WARP3 wird es wieder als Basic, Smart, Pro geben zu je den gleichen Preisen wie bei WARP2
-
Edit: Oh, hatte nicht gesehen das MatzeTF schon geantwortet hat. Aber ich lasse einfach beides stehen, doppelt hält besser. Wenn du über MQTT die Ladung freigibst, aber OCPP die Ladung noch blockt, dann bleibt die Ladung blockiert. Die Ladung kann nur gestartet werden wenn sie von allen "Slots" freigegeben wird. Es gibt ja ganz viele Ladegrenzen. In deinem Fall kann es sein, dass die Wallbox per Schiebeschalter auf 16A konfiguriert ist, in der UI auf 12A und das Lastmanagement 10A zulässt. Zusätzlich lässt MQTT 16A zu, OCPP aber 0A. Es wird von allen Ladegrenzen das Minimum genommen. Eventuell kannst du über MQTT die OCPP-Ladegrenze ändern, da bin ich mir nicht sicher. Das ist eine Frage für @rtrbt.
-
Firmware: Thermal Imaging Bricklet 2.0.6 Add FFC shutter mode and normalization API Download: Thermal Imaging Bricklet
-
Firmware: Thermal Imaging Bricklet 2.0.6 Add FFC shutter mode and normalization API Download: Thermal Imaging Bricklet
-
-
Blog entry "New HAT Brick and Industrial Dual AC In Bricklet": https://www.tinkerforge.com/en/blog/new-hat-brick-and-industrial-dual-ac-in-bricklet/
-
Blogeintrag Neues HAT Brick und Industrial Dual AC In Bricklet: https://www.tinkerforge.com/de/blog/new-hat-brick-and-industrial-dual-ac-in-bricklet/
-
-
Das wird gleichzeitig mit der WARP3-Veröffentlichung kommen.
-
Der allerfrühste Zeitpunkt wird leider der 28.03. werden (da wir dort eins der uns aktuell fehlenden Bauteile geliefert bekommen in größerer Stückzahl). Danach müssen die Boxen dann gebaut, getestet und verschickt werden. Ich gehe davon aus das wir bei Veröffentlichung erst eine größere Bestell-Queue haben werden die von der Produktion dann erst abgearbeitet werden muss. Eine Auslieferung in Q1 2024 können wir leider nicht mit 100%iger Sicherheit garantieren befürchte ich. Im Shop wird die WARP3 aber Ende März sein, im Zweifelsfall dann mit etwas Lieferzeit noch. Das können wir dann aber sicher genauer definieren. Ja
-
Für ISO15118 muss CAN über Ethernet über PowerLAN über die CP/PE-Leitung gesprochen, das kann die verbaute Hardware nicht. Wenn wir das anbieten wird man zur Nachrüstung ein anderes EVSE Bricklet einbauen müssen, was das alte ersetzt.
-
Bei WARP2 passiert die Phasenumschaltung über den WARP Energy Manager (EVCC unterstützt den auch). Bei WARP3 ist die Phasenumschaltung direkt in der Wallbox (wird EVCC auch direkt unterstützen). WARP3 wird voraussichtlich Ende März verfügbar sein.
-
Ja, wir kümmern uns drum das WARP3 auch mit auf die Liste kommt.
-
Das sieht so aus als würde die Wallbox jetzt ein Auto erkennen obwohl keins mehr angesteckt ist. Anbei nochmal eine neue Kalibrierung. Ich würde sagen das ist jetzt der allerletzte Versuch... Wenn das damit nicht in allen Fällen stabil läuft tauschen wir die Wallbox aus. calibration.json
-
The HAT Brick is currently in production and will be available again soon :).
-
Das klingt so als wäre der HAT Brick im Bootloader-Modus. Wenn er im Bootloader-Modus ist kann er beim Starten vom RPi nicht automatisch erkannt und konfiguriert werden. Du müsstest einmal diese Konfiguration hier in die /etc/brickd.conf übernehmen: https://www.tinkerforge.com/de/doc/Hardware/Bricks/HAT_Brick.html#kompatibilitat-zu-anderen-boards-und-images sowie per raspi-config spidev0 aktivieren. Danach neustarten, dann sollte der HAT Brick wieder im Brick Viewer auftauchen und dann kannst du die Firmware wieder draufflashen.