
borg
-
Gesamte Inhalte
3.627 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
61
Posts erstellt von borg
-
-
Das geht bei dem BME680 den wir auf dem Bricklet nutzen über "Bosch Sensortec Environmental Cluster" (BSEC): https://www.bosch-sensortec.com/software-tools/software/bsec/
Bosch hält sich da leider bedeckt wie die Berechnungen stattfinden, da haben wir auch keine weiteren Infos.
-
Schwer zu sagen was da das Problem ist.
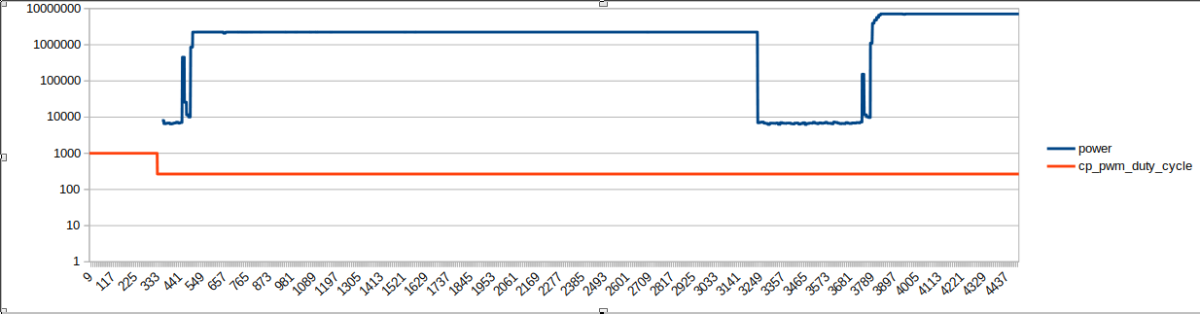
Das PWM-Tastverhältnis bleibt die ganze Zeit gleich (siehe unten), auch während der Golf aufhört zu laden. Daher weiß ich gerade nicht was die Wallbox da anders machen soll.
Ist es vielleicht möglich beim Golf eine standortabhängige Ladegeschwindigkeit oder ähnliches einzustellen?

-
Unter Wallbox -> Ladestatus -> Low-Level-Zustand gibt es CP-PWM-Tastverhältnis.
Schau mal auf was das steht wenn das Auto fälschlicherweise mit 2,2kW lädt. Das ist was das Auto wirklich zu sehen bekommt von der Wallbox.
https://de.wikipedia.org/wiki/IEC_62196_Typ_2#Signalisierung dort unter "Pulsweiten zur Anzeige der höchsten Stromlast" kannst du nachsehen was die Pulsweite bedeutet.
Edit: Wenn du dabei bist könntest du unter Wallbox -> Ladestatus -> Ladeprotokoll auch einmal ein Ladeprotokoll machen. Am besten startest du das Ladeprotokoll, steckst dann das Auto an, wartest bis es mit 2,2kW lädt, startest dann die Ladung neu so dass es mit 7kW lädt und stoppst dann das Ladeprotokoll. Dann haben wir alle Zustände einmal aufgezeichnet und können schauen was sich unterscheidet zwischen dem ersten und zweiten Ladevorgang.
-
Am 18.6.2023 um 19:44 schrieb jensstark:
Schön wäre auch ein Link auf die Firmware-Downloadsite oder die Möglichkeit, online zu prüfen, ob es eine neue Version gibt. :)
Das steht relativ hoch bei uns auf der TODO-Liste!
-
 1
1
-
-
Zu 1) und 2) schonmal: Die PDF-Anleitung für WARP1 (und noch schlimmer die gedruckte Anleitung die bei der Wallbox dabei lag) ist leider immer chronisch veraltet bezüglich des Webinterfaces, da wir dieses noch stetig am verbessern/erweitern sind.
Auf Dauer werden wir die Anleitung dafür mit in das Webinterface bringen und weniger im PDF haben, das ist dann einfacher synchron zu halten und die Anleitung im Webinterface beschreibt natürlich auch immer die Version vom Webinterface die gerade genutzt wird.
-
Die Kalibrierung/Widerstandsmessung sieht leider sehr gut aus.
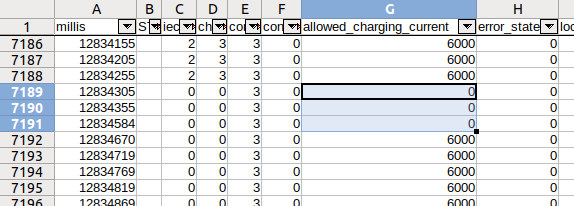
Im Log kann man sehen das der "allowed_charging_current" (das ist das Minimum aller gesetzten maximalen Ladeströme) für 150ms auf 0 geht:
Das passiert dann ca. alle 45 Sekunden. Manchmal ist es etwas länger als 150ms aber immer nur für kurze Zeit.
Die große Frage ist jetzt was da den Strom runter setzt, geht leider aus dem Log nicht hervor. Eventuell müssen wir dir eine Testfirmware mit mehr Debug-Ausgabe geben.
-
@roquestrongo Also rein technisch gibt die Wallbox dem Auto einen Maximalstrom vor das es ziehen darf und das Auto zieht dann soviel wie es möchte, aber maximal den Maximalstrom. Sprich: An der Stelle ist da nichts zu kalibrieren o.ä., das Auto entscheidet selber so wenig zu ziehen.
Ich hab aber eine Idee woran es liegen könnte: Bei VW gibt es so eine Art "Notlademodus" in dem die Autos laden wenn der Stecker in der Buchse nicht verriegelt.
Wenn du den Stecker in das Auto steckst wird so ein Bolzen vom Auto in den Stecker geschoben, der dafür sorgt das man den Stecker nicht mehr rausziehen kann während man lädt. Wenn die Verriegelung aus Sicht des Autos nicht funktioniert geht es in den Notlademodus uns lädt nur mit geringem Strom.
Könntest du einmal drauf achten beim Laden ob der Stecker verriegelt wird? Haben die Löcher wo der Riegeln reingeschoben wird (siehe unten) vielleicht ein bisschen "Grat" vom Spritzguss den man noch abknibbeln kann der dazu führt dass der VW manchmal nicht richtig verriegelt?
-
1
-
-
Es wird immer das Minimum aller vorgegebenen Maximalströme genommen.
Also wenn der Lastmanager 16A freigibt, extern aber 32A freigegeben werden, darf das Auto mit maximal 16A laden.
Wenn der Lastmanager 32 freigibt, extern aber nur 16A freigegeben werden, darf das Auto auch nur mit maximal 16A laden.
-
 1
1
-
-
Ist denn der Shutter an dem abgefallenen Teil oder noch OK? Wenn das abgefallene Teil wirklich nur eine Plastikabdeckung ist kannst du sicher probieren die wieder zu befestigen.
Ich weiß nicht wie das Teil normalerweise befestigt ist, klippt das vielleicht irgendwie wieder drauf?
-
Die Wallbox gibt dem Auto einen maximalen Ladestrom vor (in dem Fall 16A). Das Auto darf dann selber entscheiden wieviel Strom es zieht (bis hin zum Maximum).
Wenn du im Auto 6A einstellst und es dann trotzdem 16A zieht, dann liegt das am Auto. Die Wallbox hat damit nichts zu tun.
-
Die Wallbox teilt dem Auto den maximalen Strom mit den es ziehen darf. Dies passiert über ein PWM auf der CP-Leitung. Die Pulsweite des PWMs ist sehr genau, da ist nichts zu kalibrieren.
Der wichtige Teil hier ist, dass die Wallbox das Auto nicht zum Laden eines bestimmten Stroms zwingen kann. Sie kann nur den Maximalstrom vorgeben. Das Auto entscheidet selber wieviel es zieht (bis zum Maximum). Es kann auch viel weniger als 16A ziehen wenn z.B. die Batterie zu kalt oder zu voll ist o.ä.
Da es mehrere Automodelle gibt die etwas unter dem eingestellten Strom ziehen haben wir einen Boost-Modus. Den kannst du unter Ladeeinstellungen -> Boost-Modus aktivieren.
-
Am 27.4.2023 um 09:49 schrieb Elluminatus:
Was mir sonst noch einfällt ist die Quasar2 Wallbox
Gibt es die denn mit CCS-Stecker irgendwo zu kaufen?
-
Ganz geringe Frequenzen kannst du mit den Analog Out Bricklets händisch erzeugen. Sonst haben wir da aktuell leider nichts.
-
Das klingt in der Tat sinnvoll. Ich schreib es mal auf die TODO-Liste: https://github.com/Tinkerforge/lcd-128x64-bricklet/issues/1
-
Wir bekommen die Kabel hier aktuell in der Tat mit bereits angegossenem Stecker.
Am einfachsten ist es vermutlich wenn du das ganze Kabel austauschst. Ein paar Kunden von uns betreiben einen WARP Charger mit dem Kabel+Typ2 Stecker von Metron: https://eauto.si/metron-shop/product/xc01t-type-2-pigtail/. Das ist aber natürlich ein teures vergnügen...
-
Es gibt kein Routing zwischen LAN und WLAN auf der Wallbox. Die beiden Interfaces sind unabhängig voneinander.
-
RASP-GP wird aktuell nicht genutzt.
-
Sehr mysteriös irgendwie. Ich weiß nicht welche Art von Hardwaredefekt dazu führen könnte das es zu diesem "langsamen Absturz" kommt wenn man get_identity aufruft. Sag auf jeden Fall Bescheid ob der Tausch der Hardware etwas bringt. Wir können dir das dann natürlich auch rückerstatten wenn ein Hardwaredefekt vorliegt (und es wäre schön wenn du die defekte Hardware dann zurückschicken könntest, damit wir uns das anschauen können).
-
Mh, die Ethernet Extension hat nur eine feste Anzahl von Sockets die genutzt werden können. Kann es sein dass du irgendwie neue Verbindungen zur Ethernet Extension aufbaust und auf Dauer alle Sockets verwendet sind? Wenn dann der Neustart klappt sind wieder alle Sockets verfügbar.
-
Kurzer Hinweis: @rtrbt ist für 2 Wochen im Urlaub, daher wird es ein bisschen dauern bis zum nächsten OCPP-Release/Fix.
-
1
-
-
Firmware: Master Brick 2.5.2
- Add support for Master Brick 3.2 (will now show as hardware verison 3.2 in Brick Viewer)
Download: Master Brick
-
Firmware: Master Brick 2.5.2
- Support für Hardware Version 3.2 hinzugefügt (wird jetzt im Brick Viewer auch als Hardware Version 3.2 angezeigt)
Download: Master Brick
-
Du müsstest die Löcher in die Rückseite des Gehäuses bohren anhand der Bohrschablone: https://www.warp-charger.com/documents/WARP2_1_Bohrschablone.pdf
Ansonsten brauchst du noch die Blindstopfen, eine Kabeldurchführung für das Ethernet-Kabel und das kleine Ethernet-Verlängerungskabel mit 90°-Stecker zum einfacheren anschließen. Entweder du findest dafür was passendes im Baumarkt oder schreib eine Email an sales@tinkerforge.com. Wir können dir die Teile dann auch zuschicken (so einzeln haben wir das nicht im Shop, nur das komplette Gehäuse mit allen Anbauteilen).
-
Ich hab es mir mal auf die TODO-Liste geschrieben. Kann da allerdings kein Datum versprechen, wir sind aktuell etwas überausgelastet.

Air Quality Bricklet - Rückrechung auf VOC?
in Hardware
Geschrieben
Das Auslesen per SPI übernimmt auch BSEC. Allerdings werden die Daten von BSEC zwischengespeichert in Feldern wo wir dran kommen, ich denke man könnte die "Gas Resistance" mit ausgeben in Theorie. Aktuell ist es aber leider nicht drin in der Firmware.