rtrbt
Administrators
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von rtrbt
-
tl;dr: Nach meiner Interpretation der Spec wirkt ein ChargePointMaxProfile, dass als Kind "Absolute", aber keinen scheduleStart-Wert gesetzt hat, nie. Das ist aber streitbar. Wenn du scheduleStart auf einen Zeitpunkt in der Vergangenheit setzt funktionierts. Hm das ist ein sehr spezifischer Fall, den du da erzeugst. Das ChargingProfile hat als Kind "Absolute". Laut Spec (Hervorhebung von mir) Der ChargingSchedule hat aber keinen startSchedule gesetzt. Wieder laut Spec Nach meiner Interpretation heißt das, dass du bei einem Absolute-Profile im Schedule den startSchedule weglassen darfst, und wenn du das tust, dann fängt das ganze Profile in dem Moment zu wirken an, wenn ein Ladevorgang (also eine Transaktion) beginnt. Ich habe mir dann den Code, der ein Profile evaluiert nochmal angesehen (findest du hier: https://github.com/Tinkerforge/tfocpp/blob/fdf69d6389e803c4b2d06ac3b9ec20c8b816404a/src/ocpp/ChargingProfile.cpp#L47 im Code sind alle /* */-Kommentare Zitate aus der Spec) und mit den Debug-Ausgaben nachvollzogen, warum das Profile nicht wirkt. Sowohl wenn das Profile gesetzt wird, als auch wenn die Transaktion beginnt, bekomme ich folgende Ausgabe: 2023-07-06 09:25:56,730 Received SetChargingProfile.req stacklevel 0 2023-07-06 09:25:56,741 Charging profile accepted as ChargePointMaxProfile level 0 2023-07-06 09:25:56,785 Sending SetChargingProfile.conf. 2023-07-06 09:25:56,809 Evaluating charging profiles 2023-07-06 09:25:56,810 ChargePointMaxProfiles[3] not set 2023-07-06 09:25:56,810 ChargePointMaxProfiles[2] not set 2023-07-06 09:25:56,820 ChargePointMaxProfiles[1] not set 2023-07-06 09:25:56,821 Evaluating charging profile 5 2023-07-06 09:25:56,831 startSchedule not set or kind is relative. Assuming schedule is relative to the start of a transaction. 2023-07-06 09:25:56,841 No transaction running. Schedule does not apply. 2023-07-06 09:25:56,852 TODO HIT. 2023-07-06 09:25:56,852 ChargePointMaxProfiles[0] did not apply ---------------------------------- 2023-07-06 09:26:26,869 Sending StartTransaction.req at connector 1 for tag 0460FC929E3380 at 32.758 kWh. 2023-07-06 09:26:26,874 Sending StatusNotification.req: Status SuspendedEVSE for connector 1 2023-07-06 09:26:26,889 Evaluating charging profiles 2023-07-06 09:26:26,889 ChargePointMaxProfiles[3] not set 2023-07-06 09:26:26,889 ChargePointMaxProfiles[2] not set 2023-07-06 09:26:26,899 ChargePointMaxProfiles[1] not set 2023-07-06 09:26:26,900 Evaluating charging profile 5 2023-07-06 09:26:26,910 startSchedule not set or kind is relative. Assuming schedule is relative to the start of a transaction. 2023-07-06 09:26:26,920 No transaction running. Schedule does not apply. 2023-07-06 09:26:26,931 TODO HIT. 2023-07-06 09:26:26,931 ChargePointMaxProfiles[0] did not apply Im Code sind wir dann hier: https://github.com/Tinkerforge/tfocpp/blob/fdf69d6389e803c4b2d06ac3b9ec20c8b816404a/src/ocpp/ChargingProfile.cpp#L91-L97 In beiden Fällen wirkt das Profile also nicht, weil (angeblich) keine Transaktion läuft. Das liegt daran, dass die Transaktion, die in der zweiten Ausgabe gestartet wurde, auf dem Connector 1 läuft (also dem einzigen, den die Wallbox hat). Auf Connector 0 (also dem ganzen Charge Point) läuft nie eine Transaktion, die sind immer den spezifischen Connectoren zugeordnet. Deshalb ist im Evaluierungs-Code die startTxnTime nie gesetzt und damit wird der Schedule nicht angewandt. Die Interpretation, dass eine Transaktion nicht in die Evaluierung eines Profiles auf Connector 0 eingeht, ist leider etwas wage. Ich finde aber, dass die Spec zumindest Hinweise darauf gibt, dass das so gedacht ist: 1. Transaktionsspezifische Profiles sind nicht auf Connector 0 erlaubt: und für das transactionId-Feld des ChargingProfiles: 2. ChargePointMaxProfiles sind explizit zur Lastverteilung gedacht. Dabei sollte egal sein, ob gerade eine Transaktion läuft oder nicht: Wenn ich das Profile so ändere, dass es nicht mehr vom Transaktionsstart abhängt, indem ich startSchedule auf z.B. den 6.7.2023 00:00 setze, dann funktionierts wie erwartet: 2023-07-06 10:23:43,204 Received SetChargingProfile.req stacklevel 0 2023-07-06 10:23:43,216 Charging profile accepted as ChargePointMaxProfile level 0 2023-07-06 10:23:43,258 Sending SetChargingProfile.conf. 2023-07-06 10:23:43,344 Evaluating charging profiles [...] 2023-07-06 10:23:43,355 Evaluating charging profile 5 2023-07-06 10:23:43,366 startSchedule set and kind is absolute or recurring. Using startSchedule. 2023-07-06 10:23:43,376 Checking schedule periods. 2023-07-06 10:23:43,376 Schedule applied. 2023-07-06 10:23:43,387 Setting number of phases to 3. 2023-07-06 10:23:43,387 Setting current limit to 9.000. 2023-07-06 10:23:43,398 ChargePointMaxProfiles[0] applied. 2023-07-06 10:23:43,398 ConnID Allowed Phases MinRate 2023-07-06 10:23:43,408 0 9.000 3 0.000 2023-07-06 10:23:43,409 1 32.000 3 0.000 [...] 2023-07-06 10:23:43,452 Profile evaluation done. Distributing limit 2023-07-06 10:23:43,462 Currents distributed: 2023-07-06 10:23:43,462 ConnID Allowed Phases MinRate 2023-07-06 10:23:43,473 0 9.000 3 0.000 2023-07-06 10:23:43,473 1 9.000 3 0.000 2023-07-06 10:23:43,483 Next check: never 2023-07-06 10:23:43,484 2023-07-06 10:23:43,484 Setting connector 1 limit to 9000
-
Teste bitte mal diese Firmware-Version:
-
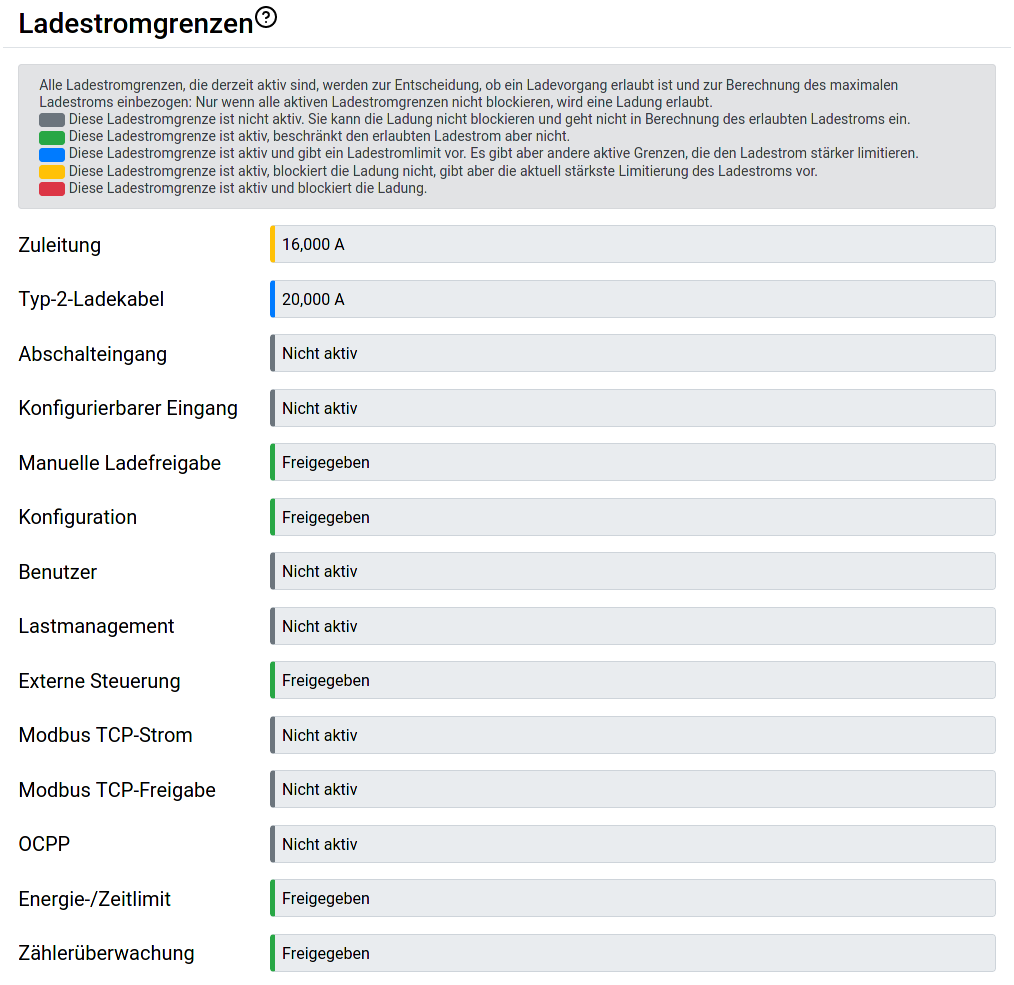
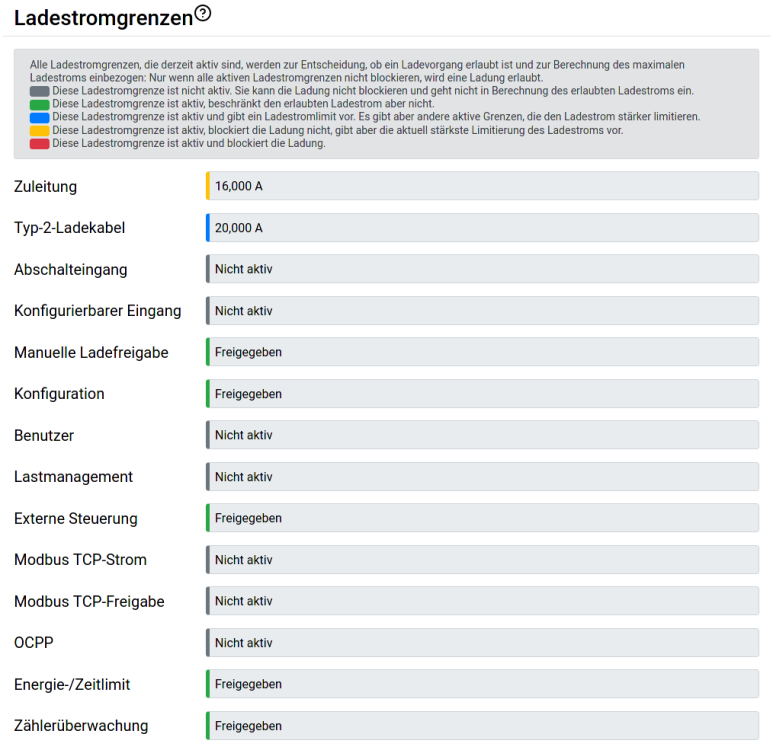
Mit der Methode "Auto anstecken". Was die manuelle Ladefreigabe im Endeffekt tut ist, dass sie die Ladestromgrenze "Manuelle Ladefreigabe" auf blockiert (bzw. 0 Ampere) setzt und zwar in dem Moment, in dem du ein Auto abziehst. Das heißt im Umkehrschluss, dass wenn du ein Auto ansteckst, immer in der Grenze 0 Ampere steht. Du musst dann also jedes Mal diese Ladestromgrenze wieder freigeben indem du eins der folgenden Dinge tust: im Webinterface auf Start klickst Bei passender Tasterkonfiguration (Ladestart oder Ladestart/Ladestop) den Taster drückst die API evse/start_charging aufrufst Jein. Alle Ladestromgrenzen sind im Endeffekt jeweils eine Zahl, nämlich entweder 0, oder 6000 bis 32000 Milliampere. Das Webinterface zeigt dir statt 0 aber "blockiert" und statt 32000 "freigegeben" an. Außer den Ladestromgrenzen gibt es keine "normalen" (lies: nicht Fehler-) Umstände, die einen Ladevorgang verhindern können. Genau. Wobei "die Ladefreigabe ist durch die Grenze nicht verhindert" trotzdem bedeuten kann, dass der Ladestrom limitiert wird. Eben dann, wenn nicht "freigegeben" sondern z.B. 10,123 Ampere im Slot steht. Der "Freigeben"-Button tut nichts anderes, als in den Slot wieder 32 Ampere zu schreiben. Da hast du eine interessante Frage aufgeworfen. Zuerst die einfache Antwort: den Freigeben-Button am "Externe Steuerung"-Slot braucht man, wenn die externe Steuerung sich aufgehangen hat, man aber wieder laden möchte. Da das eher ein Spezialfall ist, verstecken wir jetzt den Button, wenn die externe Steuerung deaktiviert ist oder bereits freigibt. Den Button am "Konfiguration"-Slot brauchte man früher, wenn man die Schiebeschalter in der Wallbox umgestellt hat. Wir haben aber vor ein paar Monaten geändert, dass wenn du auf der Statusseite zum Beispiel maximal 16 Ampere einstellen kannst (weil das das Minimum aus Lade- und Zuleitungskabel-Slot ist), in Wirklichkeit 32 Ampere (also "Freigegeben") geschickt werden, wenn du 16 Ampere eingibst, bzw. den Button dafür benutzt. Das heißt "Wer braucht das?" -> niemand -> Ich habe den Button entfernt. Danke für den Hinweis :D Steht sie in gewisser Weise: "Auf dieser Unterseite werden außerdem die aktuellen Ladestromgrenzen angezeigt. Alle Grenzen, die derzeit aktiv sind, werden zur Entscheidung, ob ein Ladevorgang erlaubt ist und zur Berechnung des maximalen Ladestroms einbezogen: Nur wenn alle aktiven Ladestromgrenzen nicht blockieren, wird eine Ladung erlaubt. Der erlaubte Ladestrom ist dann das Minimum aller aktiven Grenzen." Fairerweise ist das sehr kompakt beschrieben. Wir haben prinzipiell vor, mehr erklärende Texte ins Webinterface zu bringen. Die Idee ist, dass es bei komplizierteren Einstellungen einen ?-Button gibt, der eine Erklärung aufklappt. Das hat einerseits den Vorteil, dass die Seite übersichtlicher ist, wenn die Erklärungen nicht aufgeklappt sind, andererseits hat man da dann auch mal die Gelegenheit mehr als einen Halbsatz über eine Konfiguration zu verlieren. Das würde ungefähr so aussehen: (Am Layout usw. wird noch gefeilt) Wie üblich danke für's Feedback. Wenn man jeden Tag auf das Webinterface bzw. in die Firmware starrt, sieht man die Komplexität manchmal nicht mehr.
-
Immer gerne :) Ist im Moment nicht geplant. Was wäre dein Use-Case dafür? (Wenn der gut ist, kann man die Planung ja ändern ;) ) In der Standardeinstellung nicht. Du kannst aber per ChangeConfiguration den MeterValuesAlignedData-Wert ändern um mehr Zählermesswerte zu bekommen. Alle Zählerwerte, die OCPP ansich kennt findest du hier: https://github.com/Tinkerforge/tfocpp/blob/master/spec/ocpp-1.6 edition 2.pdf auf Seite 86 und 87 (der Abschnitt 7.31. Measurand) Im Moment unterstützen wir folgende, wenn du einen SDM72V2 verbaut hast: Energy.Active.Export.Register,Energy.Active.Import.Register,Energy.Reactive.Export.Register,Energy.Reactive.Import.Register,Power.Active.Export,Power.Active.Import,Power.Offered,Power.Reactive.Export,Power.Reactive.Import,Power.Factor,Current.Import,Current.Export,Current.Offered,Voltage,Frequency bzw. folgende wenn du einen SDM630 verbaut hast: Energy.Active.Export.Register,Energy.Active.Import.Register,Energy.Reactive.Export.Register,Energy.Reactive.Import.Register,Power.Active.Export,Power.Active.Import,Power.Reactive.Export,Power.Reactive.Import,Power.Factor,Current.Offered,Voltage,Frequency (das ist direkt die kommaseparierte Liste, die du per ChangeConfiguration schicken kannst) Beim SDM630 fehlen Current.Import, Current.Export und Power.Offered. Die sollten eigentlich verfügbar sein, sehe ich nochmal nach: https://github.com/Tinkerforge/esp32-firmware/issues/259
-
Hm, das hatte ich befürchtet. Im Anhang die Variante, bei der wir den Widerstandspeak beim Übergang von "Auto will Strom" nach "Auto will keinen Strom" ignorieren. Da ich optimistisch bin, dass das jetzt funktioniert, habe ich dir die Firmware in zwei Varianten angehangen: Teste erstmal mit der warp_firmware_2_1_2... Das ist wie gehabt eine WARP1 2.1.2-Firmware mit den Bugfixes zusätzlich drin. Falls das funktioniert, kannst du dann auf die warp_firmware_2_1_3... wechseln. Dann hast du die ganzen Neuerungen aus 2.1.3 und die Bugfixes oben drauf. Sonst müsstest du auf der 2.1.2+ bleiben, bis wir irgendwann 2.1.4 veröffentlichen. Edit: Veraltete Firmware entfernt.
-
Update: Den Bug mit der Defaulteinstellung der Zählerwerte habe ich gefunden und gefixt. Firmware mit dem Fix ist im Anhang. Edit: Veraltete Firmware entfernt.
-
Das ist in der Tat seltsam. Ich kann das hier auch nachstellen. Die Default-Einstellung ist, dass Meter.Active.Import.Register (lies: der Stromzählerwert) alle 60 Sekunden geschickt werden soll. Das funktioniert bei mir aber erst, wenn ich einmal ein ChangeConfiguration schicke, dass MeterValuesAlignedData auf den Wert konfiguriert (und dann neustarte weil ChangeConfiguration mit RebootRequired antwortet). Ich debugge das und melde mich nochmal. Das ist im Moment korrekt. Statt einer RemoteStartTransaction-Message kannst du auch ein NFC-Tag an die Wallbox halten. Dann schickt sie ein Authorize.req an den Server und wenn der das Tag autorisiert, beginnt der Ladevorgang. Nach der OCPP-Spezifikation gibt es keine Möglichkeit einen komplett unautorisierten Vorgang zu starten, solange eine Verbindung zum Server besteht (also einen der weder vom Server durch eine Authorize.conf bestätigt, oder durch ein RemoteStartTransaction angefordert wurde). Das ist aber ein Modus, den wir gegebenfalls noch nachlegen wollen, gerade mit dem Gedanken, dass später ja auch Netzbetreiber Wallboxen per OCPP steuern wollen, ich da aber im Moment nicht davon ausgehe, das man denen eine Liste von NFC-Tags geben kann/muss. Das funktioniert in meinem Test. Bekommst du im Ereignis-Log Ausgaben, wenn du das Profile schickst? Bzw. spätestens alle 5 Minuten wertet die Wallbox alle konfigurierten Profile neu aus. Der Output ist dann z.B.: 2023-06-29 14:42:55,042 Evaluating charging profiles 2023-06-29 14:42:55,043 ChargePointMaxProfiles[1] applied. 2023-06-29 14:42:55,043 Connector 1 2023-06-29 14:42:55,053 Profile evaluation done. Distributing limit 2023-06-29 14:42:55,054 Currents distributed: 2023-06-29 14:42:55,064 ConnID Allowed Phases MinRate 2023-06-29 14:42:55,064 0 12.000 3 0.000 2023-06-29 14:42:55,075 1 12.000 3 0.000 2023-06-29 14:42:55,075 Next check: 2023-06-29T20:00:00Z 2023-06-29 14:42:55,085 2023-06-29 14:42:55,086 Setting connector 1 limit to 12000 (Ich habe testweise ein ChargePointMaxProfile installiert, dass den Strom von 8 bis 20 Uhr UTC auf 12 Ampere limitiert) Bekommst du ähnliche Ausgaben?
-
Sorry, zwei Wörter für's gleiche. Ein Slot ist eine Ladestromgrenze, so wie du sie im Ladestatus siehst. Den Slot hast nicht du so gesetzt. Das war die große Frage. Inzwischen habe ich es rausgefunden: Der Slot ist ursprünglich bei WARP1 und WARP2 falsch konfiguriert gewesen. Bei WARP2 haben wir das mit Firmware 2.1.2 schon gefixt gehabt, aber bei WARP1 hatten wir übersehen, dass das selbe Problem existiert. Ich habe das jetzt für WARP1 auch gefixt, neue Firmware ist im Anhang. Edit: Veraltete Firmware entfernt.
-
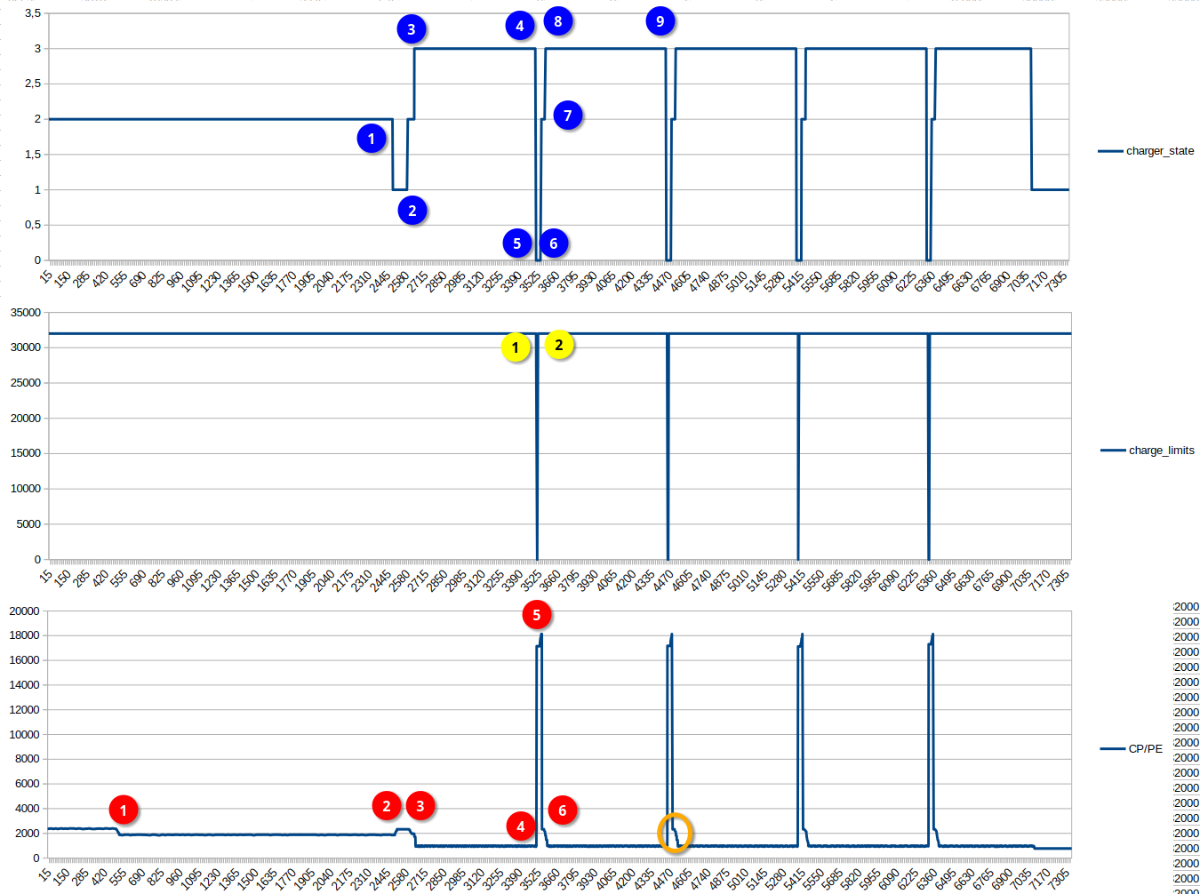
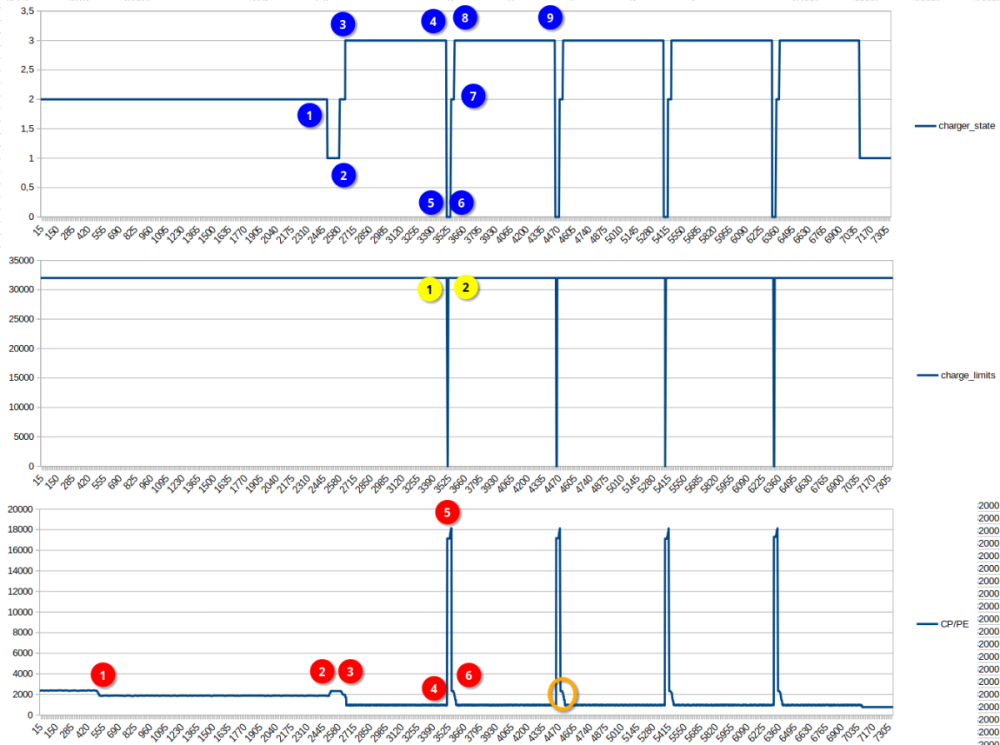
Okay, ich glaube ich habe jetzt verstanden, was da passiert. Da das kompliziert ist habe ich das ganze mal geplottet (mein Excel-Foo ist nicht gut deshalb einfach drei Graphen untereinander) und annotiert. Du hast folgende Reihenfolge erzeugt: 10 Ampere erlaubt, Auto ist voll (das ist der Anfang des Graphen) Strom auf 6 Ampere reduziert. Das beeinflusst bei WARP1 die CP-PE-Widerstandsmessung, was man im 3. Graph sieht (Rote 1) Auf Stop geklickt (Blaue 1, Rote 2) -> Wir melden dem Auto über das PWM auf CP, dass kein Strom verfügbar ist -> Das PWM geht auf 100% -> Der Widerstand geht wieder etwas hoch. Auf Start geklickt. (Blaue 2) Es scheint so zu sein, dass der VW immer wieder anfängt zu laden, wenn das PWM zwischenzeitlich aus war, selbst wenn er voll ist. Das Auto will laden und setzt deshalb den Widerstand runter (Rote 3) Wir schalten das Schütz (Blaue 3) Nach 45 Sekunden bemerkt der VW, dass er voll ist. (Blaue/Rote 4) Er will deshalb den Widerstand wieder auf die 2,7kOhm setzen, macht das aber in der VW-Weise, die bei WARP1 Sprünge in der Messung erzeugt. Der gemessene Widerstand springt auf einen so hohen Wert, dass wir glauben, das Auto ist abgezogen (Blaue 5, Rote 5) Jetzt der interessante Teil: Einer der Ladestromslots, nämlich der für das Energie/Zeitlimit wird von 32A auf 0A (also blockieren) gesetzt. Das passiert vermutlich direkt durch den Ladecontroller, weil dieser Ladeslot fälschlicherweise bei dir so markiert ist, dass der Ladecontroller ihn auf 0 A setzen soll, wenn ein Auto abgezogen wird. (Gelbe 1) ~ 250ms später setzt der ESP den Slot wieder zurück auf 32 A (Gelbe 2) Der gemessene Widerstand hat sich wieder gefangen, wir messen ~2.7kOhm -> Das Auto ist angesteckt aber will nicht laden (Rote 6, Blauer Übergang von 6 zu 7.) Den Übergang habe ich nochmal beim nächsten Block orange eingekreist, weil man da gut sieht wie es erst kurz auf 2.7kOhm springt, dann etwas abfällt (weil wir wieder das PWM starten) und dann auf ~800 Ohm fällt (weil das Auto Strom anfordert) Jetzt geht es im Endeffekt von vorne los, das Auto "lädt" wieder 45 Sekunden (Blaue 8 bis 9) Das heißt es kommen folgende Probleme zusammen: Der VW schaltet die Widerstände so um, dass wir diesen Peak in der Messung sehen. Das Zeit/Energielimit geht davon aus, dass der entsprechende Ladeslot nicht beim Abziehen eines Autos geleert wird, setzt das aber nicht explizit. Aus irgendeinem Grund ist bei dir dieser Slot aber so konfiguriert, dass geleert wird. Hattest du eventuell mal eine andere Beta-Firmware, Test-Firmware oder einen der Forks laufen? Durch das Nullen des Ladeslots ist die Zeit, die der VW sehen kann, dass wir keinen Strom zur Verfügung stellen so lang, dass er dann glaubt er müsste wieder anfangen zu laden, wenn Strom verfügbar ist. Ich baue dir heute Nachmittag noch eine Testfirmware, bei der ich den Bug fixe, dass der Ladeslot zurückgesetzt wird. Im Idealfall reicht das schon, weil dann der VW nach den 45 Sekunden und der Abschaltung nicht wieder anfängt zu laden. Falls das weiterhin passiert, müssen wir (lies @borg ) in der Ladecontroller-Firmware das Timing etwas anpassen um mit dem Peak in der Messung umgehen zu können.
-
Sorry, das ist bei mir untergegangen. Habe gerade einen Blick reingeworfen, die Implementierung des Energie/Zeitlimits blockiert alle 45 Sekunden für 250ms. Jetzt muss ich nur rausfinden, warum.
-
Damit es erstmal wieder bei dir funktioniert, zwei Optionen: Entweder aktualisiere den Energy Manager auf 1.0.6 (und bleib bei der Wallbox auf 2.1.3) Oder (mit Wallbox-Firmware 2.1.3): Deaktiviere in den Ladeeinstellungen die Zählerüberwachung und gehe dann wieder auf 2.1.2. Das müsste funktionieren. Zur Erklärung: Wir haben mit der Wallbox-Firmware 2.1.0 das Lastmanagement-Kommunikationsprotokoll so umgestellt, dass es vorwärts kompatibel ist. D.h. wenn wir neue Daten hinzufügen sollte eigentlich sowohl das Setup "alter Lastmanager (egal ob Energy Manager oder Wallbox); neue gesteuerte Wallbox", als auch das Setup "neuer Lastmanager; alte gesteuerte Wallbox" funktionieren. Das scheint bei dir nicht der Fall zu sein. Werden wir uns in Ruhe ansehen. Das Downgrade der Wallbox-Firmware funktioniert bei dir nicht, weil du eine Wallbox mit Zähler hast. In 2.1.3 haben wir die Zählerüberwachung hinzugefügt, die automatisch aktiviert wird, wenn ein Stromzähler gefunden wird. Das funktioniert wie viele andere Module über eine eigene Ladestromgrenze. Wenn du jetzt auf 2.1.2 downgradest, dann bleibt diese Ladestromgrenze aktiv, die Firmware kennt sie aber nicht mehr, deshalb wird der Ladevorgang nie freigegeben. Das ist der Grund, warum wir bei 2.1.3 im Changelog "Sichergestellt, dass Downgrades (auf diese Firmware oder neuer) funktionieren, selbst wenn künftig neue Ladestromgrenzen hinzugefügt werden" haben. Ab 2.1.3 werden alle unbekannten Ladestromgrenzen (also solche, die Überbleibsel eines Up- und dann Downgrades sind) deaktiviert, damit das Laden wieder funktioniert.
-
Firmware: WARP 2.1.3 und WARP2 2.1.3 Zählerüberwachung hinzugefügt (nur WARP1) Nutzer- und NFC-Tag-Limit auf 16 erhöht (nur WARP1) Energie-Limit-Einstellung auf Dropdown-Box umgestellt (nur WARP2) Automatischen Test des DC-Fehlerstrom-Schutzmoduls mindestens alle 24 Stunden und nach Ende eines Ladevorgangs hinzugefügt (durch Update auf Ladecontroller-Firmware 2.1.13) (nur WARP2) Sichergestellt, dass aktive CP-Unterbrechung nicht durch Lastmanagement oder API-Aufrufe gestört wird (durch Update auf Ladecontroller-Firmware 2.1.13) Lastmanagement: Effizienz verbessert, wenn gesteuerte Wallbox über einen Stromzähler verfügt, der Phasenströme misst. (WARP2 Pro oder WARP1 mit nachgerüstetem SDM630 oder SDM72 V2). Lastmanagement: Hinzugefügt, dass Hostnamen von nicht mehr erreichbaren Wallboxen neu aufgelöst werden Lastmanagement: Duplizierte und springende Einträge in den Scan-Ergebnissen zu kontrollierender Wallboxen behoben Lastmanagement: Behandlung von niedrig priorisierten Wallboxen behoben Lastmanagement: Hinzugefügt, dass Wallboxen, die weniger als den erlaubten Minimalstrom unterstützen als niedrig priorisiert behandelt werden Lastmanagement: Performance bei genau 10 gesteuerten Wallboxen verbessert (nur WARP2) Button zum Testen des DC-Fehlerstrom-Schutzmoduls hinzugefügt Zuletzt gesehenes NFC-Tag zu Modbus-TCP-Registern hinzugefügt Front-Taster-LED-Steuerung über API und Modbus-TCP-Register hinzugefügt (nur WARP2) API zum Steuern des konfigurierbaren Ausgangs hinzugefügt Unbekannten Benutzer aus der Limitierung auf 16 Benutzer ausgenommen NetBIOS-Unterstützung entfernt Zeitzonen-Datenbank aktualisiert DNS-Cache-Größe erhöht Modbus-TCP-Dokumentation verbessert Lokalisierung von Gleitkommazahlen im Webinterface repariert (nur WARP2) Robustheit der IP-Konfiguration bei 10MBit LAN-Verbindungen verbessert Anzeige von Ladecontroller-Firmware- und Hardware-Version hinzugefügt Sichergestellt, dass Downgrades (auf diese Firmware oder neuer) funktionieren, selbst wenn künftig neue Ladestromgrenzen hinzugefügt werden Repariert, dass sporadisch Einträge in APIs fehlten Repariert, dass die Benutzerfreigabe bei einem Neustart der Wallbox, während der Ladevorgang pausiert ist, verloren ging Reparatur von Ladelog-Einträgen, bei denen entweder der Start- oder End-Zählerwert fehlt, hinzugefügt Absturz, wenn NFC-Logik für mehr als eine Sekunde blockiert wurde, behoben NFC-Tag-Detektionsschwelle auf 2 Sekunden angehoben Prüfung auf überlappende Netzwerkbereiche bei IP-Konfiguration von LAN (nur WARP2), WLAN und WireGuard hinzugefügt Übersetzungen verbessert Sofortigen Start des WLAN Access Points hinzugefügt, falls keine WLAN-Verbindung konfiguriert und (nur WARP2) kein Ethernet-Kabel verbunden ist Sichtbarkeit der Nulllinie in Graphen verbessert Race Condition während des Starts des Webservers behoben Race Condition während des Starts des MQTT-Clients behoben Crash bei gleichzeitigen Zugriffen von mehreren APIs behoben Webinterface-Fehler durch falsche Reihenfolge von Websocket-Nachrichten behoben Websocket-Verbindungsabbrüche durch zu große Stromzählerwerte behoben Ladeprotokolllänge auf (letzte) 20000 Zeilen begrenzt Springende Y-Achse in Graphen bei Doppelklick behoben Alle 48h-Graphen auf mindestens 1500 Watt skaliert Ereignis-Log-Meldungen überarbeitet Falsche Berechnung der 48-Stunden-Werte des Stromzähler-Graphen, falls Messwerte schneller als alle 500 ms ankommen, behoben Download: WARP 2.1.3 bzw. WARP2 2.1.3
-
Firmware: WARP Energy Manager 1.0.6 Status-Ansicht zur Tagesansicht der Energiebilanz hinzugefügt Lastmanagement: Effizienz verbessert, wenn gesteuerte Wallbox über einen Stromzähler verfügt, der Phasenströme misst. (WARP2 Pro oder WARP1 mit nachgerüstetem SDM630 oder SDM72 V2). Lastmanagement: Hinzugefügt, dass Hostnamen von nicht mehr erreichbaren Wallboxen neu aufgelöst werden Lastmanagement: Duplizierte und springende Einträge in den Scan-Ergebnissen zu kontrollierender Wallboxen behoben Lastmanagement: Behandlung von niedrig priorisierten Wallboxen behoben Lastmanagement: Hinzugefügt, dass Wallboxen, die weniger als den erlaubten Minimalstrom unterstützen als niedrig priorisiert behandelt werden Lastmanagement: Performance bei genau 10 gesteuerten Wallboxen verbessert Race Condition während des Starts des MQTT-Clients behoben Crash bei gleichzeitigen Zugriffen von mehreren APIs behoben Websocket-Verbindungsabbrüche durch zu große Stromzählerwerte behoben Übersetzungen verbessert Firmware-Aktualisierungen blockiert, wenn am Energy Manager ein Schütz und an einer kontrollierten Wallbox ein Fahrzeug angeschlossen ist Reihenfolge der gestapelten Graphen in der Tagesansicht der Energiebilanz repariert Falsche Berechnung der 48-Stunden-Werte des Stromzähler-Graphen, falls Messwerte schneller als alle 500 ms ankommen, behoben Debug-Protokolllänge auf (letzte) 20000 Zeilen begrenzt Springende Y-Achse in Graphen bei Doppelklick behoben Download: WARP Energy Manager 1.0.6
-
Wenn du so weit kommst, ist das ein gutes Zeichen: Die Modbus-Kommunikation läuft schon mal. Die SDM-Zähler haben alle ein Register, dass den Zählertyp angibt. Damit detektiert die Wallbox automatisch, was für einen Zähler du angeschlossen hast. Das Problem ist jetzt, dass es diese ältere Version des SDM630 gibt, die nicht den "erwarteten" Zählertyp in dem Register stehen hat, sondern einfach 0. Bei der WARP2 gehen wir davon aus, dass das dann ein alter SDM630 sein muss. Bei der WARP1 können wir das nicht so machen, weil es möglicherweise auch alte Versionen des SDM72DM (V1) gibt, die auch 0 zurückgeben. Deshalb muss eine WARP1 bei einem unbekannten Zähler annehmen, dass das ein SDM72DM (V1) ist. Du kannst das jetzt reparieren, indem du den Zählertypen von Hand auf SDM630 überschreibst. (Das ist eine persistente Konfiguration -> Musst du nur einmal machen) Dafür gibt es leider keinen Knopf im Webinterface (Habe mal ein Issue angelegt, dass wir den hinzufügen: https://github.com/Tinkerforge/esp32-firmware/issues/255). Um das von Hand zu machen, musst du auf die recovery-Seite der Wallbox gehen, je nachdem ob du per Hostname oder IP auf das Webinterface gehst unter http://warp-xyz/recovery oder http://10.0.0.1/recovery (Hostname oder IP musst du durch deine ersetzen). Dann unter API in die Textbox folgendes einfügen: {"method":"PUT", "url":"/meter/type_override_update", "payload":2} und auf Call API klicken. In der Textbox darunter sollte dann eine 200 erscheinen. Danach auf dem normalen Webinterface unter System->Firmware-Aktualisierung einmal auf neu starten klicken. Dann sollte der SDM630 korrekt erkannt werden. Edit: API angepasst für WARP(2) >= 2.1.3
-
Der vollständige Debug-Report wäre sehr hilfreich. Entweder hier oder per PM.
-
Das fehlte in @borgs Antwort. Der ESP startet nicht neu. Das Ladelog funktioniert wie folgt: Wenn du Start klickst, wird sofort ein Debug-Report gezogen, also die Konfiguration und das Ereignis-Log hintereinander. Danach werden die ganzen Daten gesammelt, bis du Stop klickst, dann wird nochmal ein Debug-Report gezogen. Die Idee ist, dass wir dann sehen können, welche Konfigurations-/Zustandsänderungen und welche Ereignislog-Nachrichten aufgetaucht sind, während die Daten gesammelt wurden. Der Neustart, den du da siehst, ist vor dem Start des Ladelogs passiert. und zwar ~ 3 Minuten. Wenn "Software reset via esp_restart" als "reset reason" angegeben wird, dann ist das typischerweise ein Neustart, den man aktiv ausgelöst hat, z.B. durch eine Konfigurationsänderung im Webinterface. Interessant ist, dass der Ladecontroller auch neugestartet ist, und zwar ~ 15 Minuten vor dem Start des Ladelogs. Hattest du die Wallbox vom Strom getrennt, oder die Firmware aktualisiert? Die GPIOs sind in Ordnung. Prinzipiell hast du da den Effekt, dass für's Webinterface die GPIOs nur alle 250 ms abgefragt werden, da aber teilweise deutlich hochfrequentere Prozesse ablaufen, z.B. PWMs. Dann ist praktisch zufällig, ob du High oder Low siehst. Motor fault ist okay, der Ladecontroller unterstützt theoretisch, dass man eine Dose statt einem angeschlagenen Kabel anbringt. Da das nicht der Fall ist, wird der Pin nicht angesteuert. Current configuration 0 einer der Pins mit denen die Schiebeschalter gelesen werden, die auf dem Ladecontroller verbaut sind. Mit den Schaltern wird eingestellt, wie viel Strom das Zuleitungskabel erlaubt. Der Pin (und current configuration 1) können jeweils low, high, oder open, also nicht verbunden, sein. Beim Start des Ladecontrollers legt er einen Pull-Down- und danach einen Pull-Up-Widerstand an um die drei Fälle zu unterscheiden und damit die Stellung der Schalter zu bestimmen. Das der Pin bei dir springt ist erwartet: Du hast eine 16-Ampere-Zuleitung, das wird auf den Schaltern ausgedrückt, indem beide in der Open-Position sind. Der Ladecontroller hat nach dem Start die Pull-Up/Down-Widerstände wieder weggenommen, d.h. es ist auch zufällig welcher Wert da gelesen wird (aber auch egal, eben weil sie nur beim Start ausgewertet werden) Das CP-PWM läuft mit 1000 Hz. Manchmal siehst du dann high, manchmal low Auf dem CP-Trennungspin habe ich im Log und im Video nichts gesehen. Da kannst du eventuell folgendes beobachten: Wenn das Auto 30 Sekunden, nachdem die Wallbox das Laden erlaubt (Zustand Ladebereit), nicht reagiert, machen wir eine CP-Trennung um ggfalls. die Ladeelektronik aufzuwecken. Dann sollte der Pin einmal umspringen und vier Sekunden später zurück. Danach sollte der Wert stabil sein. Wenn das Schütz geschaltet ist, pendeln die beiden GPIOs mit der Netzfrequenz (50 Hz) Die LED atmet während des Ladevorgangs, was durch ein PWM erzeugt wird. Manchmal siehst du dann gerade das PWM high, manchmal low.
-
Oh sorry. Hier eine WARP1-Firmware. Edit: Veraltete Firmware entfernt.
-
Die Daten die wir brauchen werden erst gesammelt, wenn du auf Start klickst. Also musst du den Moment abpassen, wenn das Schütz klackert. Das ist im Moment leider noch relativ primitiv gebaut, langfristig wird das besser: https://github.com/Tinkerforge/esp32-firmware/issues/171
-
Im Anhang eine Testfirmware. Damit sollte das Problem weiterhin auftreten, aber im debug-log sind noch ein paar Informationen mehr. Reproduziere das Problem mit der Firmware bitte nochmal. Edit: Veraltete Firmware entfernt.
-
Schonmal unabhängig vom Rest: Nein, das würde dazu führen, dass wenn sich ein Auto leer steht, nicht nachgeladen wird. Außerdem gibt es Autos (die Teslas z.B. wenn ich mich richtig erinnere), die im Winter ihre Heizung aus Wallbox-Strom betreiben können. Wir hatten dieses Verhalten mit dem Lastmanagement mal ausversehen implementiert und dann aber geändert. Siehe hier:
-
Zu der manuellen Ladefreigabe: Das hieß in älteren Firmware-Versionen Auto-Start. Wir haben das geändert und auf die Unterseite gepackt, weil es die meisten Nutzer eher verwirrt hatte. Jetzt ist aber die ganze Benennung noch verwirrender. Das müssen wir besser machen. Dazu noch grundlegend: Die manuelle Ladefreigabe (ex Auto-Start) als Ladestromgrenze ist wie folgt belegt: Der Taster an der Wallbox blockiert (bei WARP1 immer, bei WARP2 konfigurierbar) Wenn du auf der Statusseite auf Stop klickst, blockiert die Ladestromgrenze, wenn du auf Start klickst, gibt sie frei Wenn du die manuelle Ladefreigabe auf der Ladeeinstellungsseite aktiviert hast, dann wird blockiert, wenn ein Auto abgezogen wird (d.h. du musst den ersten Start manuell freigeben) Das ist auch ein Fall von schlechter Benennung: Der Knopf heißt "Stop", er blockiert aber nur die "manuelle Ladefreigabe"-Stromgrenze. Ein Ladevorgang beginnt (im Bezug auf die Zeit/Energielimits und den Ladetracker usw.) wenn du das Auto ansteckst und endet, wenn du es abziehst. (Ausnahme: Wenn du die NFC bzw. Benutzerfreigabe benutzt, dann beginnt der Ladevorgang erst wenn du ein Tag an die Wallbox hältst)
-
Das geht. Damit ich das richtig verstehe: Willst du den Zähler neben dem WARP Charger lassen, oder willst du ihn in die Wallbox einbauen? Im ersten Fall kannst du die Teile einfach bestellen, in Fall zwei, schreib stattdessen eine Mail an info@tinkerforge.com mit einem Verweis auf diesen Post und deiner Adresse usw. Dann legen wir dir eine Bestellung auf Rechnung an. In jedem Fall brauchst du dafür: mindestens Firmware 2.0.2 auf dem WARP Charger. Aktualisier bei der Gelegenheit am besten gleich auf die neuste Firmware: https://www.warp-charger.com/warp1.html#firmware bzw. warte noch bis Ende der Woche, dann sollte 2.1.3 erscheinen. ein RS485-Bricklet: https://www.tinkerforge.com/de/shop/warp/warp1-spare-parts/rs485-bricklet.html ein 7p-7p Bricklet-Kabel (kannst du da gleich mit bestellen), 15cm reichen Wenn du den Zähler neben dem WARP Charger lässt: Ein möglicherweise langes 3-adriges Verbindungskabel zwischen Zähler und RS485-Bricklet. In den Posts unten hat jemand ein Cat-7-Kabel benutzt. Ein Befestigungskit für das RS485-Bricklet: https://www.tinkerforge.com/de/shop/mounting-kit-12mm.html (kannst du auch beim RS485-Bricklet mit auswählen) und du musst dann ein Loch ins Gehäuse bohren um das Kabel durchzuführen und 4 Löcher in den Berührschutz um das RS485-Bricklet zu befestigen. Wenn du den Zähler in den WARP Charger einbaust: Den Berührschutz für einen WARP Charger Pro. Bei dem sind die Ausschnitte andere, damit der Zähler reinpasst. Den gibt's nicht im Shop, deshalb müsstest du uns dafür die Mail schreiben. Ein Verbindungskabel zwischen Zähler und RS485-Bricklet. Davon haben wir noch welche hier, würden wir dir dann mit reinlegen. Das prinzipielle Vorgehen ist: Wallbox stromlos machen Frontdeckel abnehmen, dabei auf das Fronttaster- und Erdungskabel achten Berührschutz ausbauen 4 Löcher reinbohren oder ESP-Brick auf den neuen Berührschutz setzen Die DIP-Schalter auf dem RS485-Bricklet auf Half-Duplex terminated schalten (1, 2, 3 auf ON; 4 auf OFF) RS485-Bricklet mit dem ESP-Brick verkabeln (Es ist egal an welchen Port du das Bricklet anschließt) und auf dem Berührschutz befestigen Loch in die Gehäusewand bohren oder den Klemmenblock ausbauen, stattdessen den Zähler einbauen und verkabeln Zähler mit RS485-Bricklet verbinden: A+ an RX+, B- an RX-, G an GND (siehe auch den Stromlaufplan hier:https://www.warp-charger.com/documents/WARP_Stromlaufplan.pdf) Berührschutz einbauen Frontdeckel aufsetzen und zuschrauben In der Software musst du nichts ändern. Das RS485-Bricklet sollte, wenn die Wallbox startet, automatisch gefunden werden. Hier haben das schon ein paar Nutzer gemacht:
-
Das sind ja zwei Probleme hintereinander: 1. Bringt das dritte Tag anscheinend den NFC-Leser durcheinander -> Ich sehe mir den zweiten debug-report gleich an und schreibe dir dann noch was dazu. Im Idealfall können wir das hier reproduzieren und dann hoffentlich fixen. 2. Wenn der NFC-Leser kurz hängt oder neu startet, kommt die Wallbox-Firmware damit nicht zurecht und crasht. -> Das habe ich behoben, d.h. selbst wenn der NFC-Leser crasht läuft die Wallbox weiter. Der Fix wird in der nächsten Firmware (voraussichtlich Ende der Woche) enthalten sein.
-
MQTT ist kein Umweg, sondern der offiziell unterstützte Weg, einen WARP Charger mit EVCC zu verbinden. Deshalb dokumentieren sowohl wir, als auch EVCC das so. Wenn du über OCPP oder Modbus gehen willst (vermutlich mit dem Hintergedanken, dass du dann keinen MQTT-Broker aufsetzen musst?), dann kannst du das tun. Für Modbus-TCP musst du: Die Wallbox entweder eine Keba-Wallbox oder einen Bender-Ladecontroller emulieren lassen. Kannst du auf der Modbus-TCP-Unterseite als Registersatz wählen Dir für EVCC ein Sponsortoken kaufen Die Wallbox in EVCC konfigurieren. Entweder als https://docs.evcc.io/docs/devices/chargers#kecontact-p20-p30-cx-series- oder als https://docs.evcc.io/docs/devices/chargers#bender-cc612613- Für OCPP musst du auch EVCC entsprechend konfigurieren, siehe hier: https://docs.evcc.io/docs/devices/chargers#ocpp-16j-kompatible-wallbox-mit-smart-charging-profil Die OCPP-Implementierung von EVCC ist aber nur das absolute Minimum (eben weil es nur ein Fallback ist, wenn keine sinnvollere Anbindung existiert), als wir das hier mal getestet hatten, hat das nicht 100%ig überzeugend funktioniert. Siehe z.B. hier: https://github.com/evcc-io/evcc/issues/5055#issuecomment-1305359228
-
Das bezieht sich nur auf die WARP1 Pro. Der Zähler in der WARP2 Pro kann ein- und dreiphasig betrieben werden.